一种公路上的障碍物检测方法、系统、存储介质及终端与流程
本发明涉及智慧交通,特别涉及一种公路上的障碍物检测方法、系统、存储介质及终端。
背景技术:
1、随着公路车流量不断增长,因公路抛洒的障碍物所诱发的事故数量呈现激增趋势。这些障碍物大多为货车上未捆扎严实而掉下的货物,或者汽车故障掉落的碎片,或者因为天气原因造成的其他障碍物,这些障碍物对高速公路行车安全造成了极大的威胁。由于公路上的机动车、护栏、车道线等对象多样化,同时公路上障碍物的种类繁多,无法使用目标检测算法逐一将其检测出来。
技术实现思路
1、本申请实施例提供了一种公路上的障碍物检测方法、系统、存储介质及终端。为了对披露的实施例的一些方面有一个基本的理解,下面给出了简单的概括。该概括部分不是泛泛评述,也不是要确定关键/重要组成元素或描绘这些实施例的保护范围。其唯一目的是用简单的形式呈现一些概念,以此作为后面的详细说明的序言。
2、第一方面,本申请实施例提供了一种公路上的障碍物检测方法,方法包括:
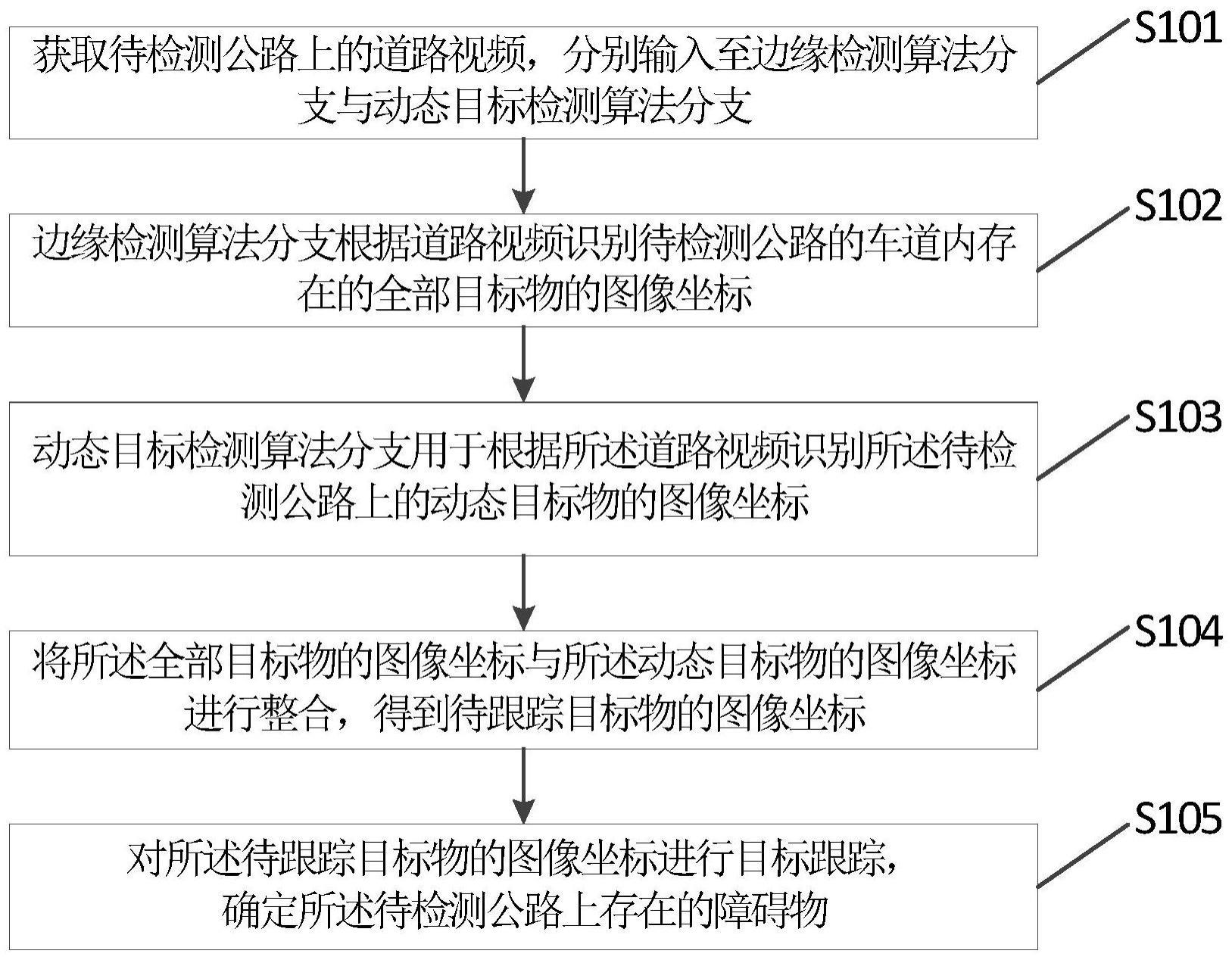
3、获取待检测公路上的道路视频,分别输入边缘检测算法分支与动态目标检测算法分支,其中,
4、所述边缘检测算法分支用于根据所述道路视频识别所述待检测公路的车道内存在的全部目标物的图像坐标;
5、所述动态目标检测算法分支用于根据所述道路视频识别所述待检测公路上的动态目标物的图像坐标;
6、将所述全部目标物的图像坐标与所述动态目标物的图像坐标进行整合,得到待跟踪目标物的图像坐标;
7、对所述待跟踪目标物的图像坐标进行目标跟踪确定所述待检测公路上存在的障碍物。
8、第二方面,本申请实施例提供了一种公路上的障碍物检测系统,系统包括:
9、道路视频获取模块,用于获取待检测公路上的道路视频,分别输入边缘检测算法分支与动态目标检测算法分支;
10、边缘检测算法分支模块,用于根据所述道路视频识别所述待检测公路的车道内存在的全部目标物的图像坐标;
11、动态目标检测算法分支模块,用于根据所述道路视频识别所述待检测公路上的动态目标物的图像坐标。
12、动态目标检测算法分支模块,用于在预先构建的动态目标检测算法分支上,将道路视频输入预先训练的动态目标检测模型中,输出动态目标物的图像坐标;
13、目标物整合模块,用于将全部目标物的图像坐标与动态目标物的图像坐标进行整合,得到待跟踪目标物的图像坐标;
14、障碍物确定模块,用于根据全部目标物的图像坐标与动态目标物的图像坐标,判定待检测公路上存在的障碍物。
15、第三方面,本申请实施例提供一种计算机存储介质,计算机存储介质存储有多条指令,指令适于由处理器加载并执行上述的方法步骤。
16、第四方面,本申请实施例提供一种终端,可包括:处理器和存储器;其中,存储器存储有计算机程序,计算机程序适于由处理器加载并执行上述的方法步骤。
17、本申请实施例提供的技术方案可以包括以下有益效果:
18、在本申请实施例中,公路上的障碍物检测系统获取待检测公路的道路视频,输入至边缘检测算法分支与动态目标检测算法分支;边缘检测算法分支根据该视频识别该公路的车道内存在的全部目标物的图像坐标;动态目标检测算法分支根据该视频输出动态目标物的图像坐标;将全部目标物与动态目标物的图像坐标进行整合,得到待跟踪目标物的图像坐标;对待跟踪目标物的图像坐标进行目标跟踪确定待检测公路上存在的障碍物。由于本申请边缘检测算法分支是通过边缘检测识别视频图像序列中的所有物体及车道,识别车道内存在的全部目标物体的图像轮廓及坐标;动态目标检测算法分支是部分检测,检测动态目标物类型及坐标,通过两通道检测结果的整合,可得到待跟踪目标物,该方式使得边缘检测算法分支可无需加载目标类型识别算法,节省了算力,该双通道检测可以提升障碍物识别的精度。
19、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本发明。
技术特征:
1.一种公路上的障碍物检测方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述边缘检测算法分支预设有边缘检测模型,所述边缘检测算法分支用于根据所述道路视频识别所述待检测公路的车道内存在的全部目标物的图像坐标,包括:
3.根据权利要求2所述的方法,其特征在于,所述采用所述边缘检测模型对所述道路视频的图像序列逐一进行图像边缘检测,得到全量物体的图像坐标,包括:
4.根据权利要求2所述的方法,其特征在于,所述识别所述道路视频的图像序列中的目标车道,包括:
5.根据权利要求4所述的方法,其特征在于,所述根据所述霍夫变换的特征线段计算车道的左边界线和右边界线,包括:
6.根据权利要求1所述的方法,其特征在于,所述将所述全部目标物的图像坐标与所述动态目标物的图像坐标进行整合,包括:
7.根据权利要求1所述的方法,其特征在于,所述待检测公路上存在的障碍物确定之后,还包括:
8.一种公路上的障碍物检测系统,其特征在于,所述系统包括:
9.一种计算机存储介质,其特征在于,所述计算机存储介质存储有多条指令,所述指令适于由处理器加载并执行如权利要求1-7任意一项所述的方法。
10.一种终端,其特征在于,包括:处理器和存储器;其中,所述存储器
技术总结
本发明公开了一种公路上的障碍物检测方法,方法包括:公路上的障碍物检测系统获取待检测公路的道路视频,分别输入至边缘检测算法分支与动态目标检测算法分支;边缘检测算法分支识别该公路的车道内存在的全部目标物的图像坐标;动态目标检测算法分支识别动态目标物;将全部目标物与动态目标物的图像坐标进行整合,得到待跟踪目标物的图像坐标;对待跟踪目标物的图像坐标进行目标跟踪确定待检测公路上存在的障碍物。本申请边缘检测算法分支是全量检测,识别检测物体的图像坐标,动态目标检测算法分支是部分检测,检测动态目标物类型及坐标,通过两通道检测结果的整合可得到待跟踪目标物,该双通道检测可以提升障碍物识别的精度。
技术研发人员:黄大伟,曹硕,夏曙东,梁海鹄
受保护的技术使用者:北京千方科技股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!