一种多类别目标物的分拣方法、AR眼镜和系统与流程
本申请涉及计算机,尤其涉及一种多类别目标物的分拣方法、ar眼镜和系统。
背景技术:
1、现有场景技术中,通过ar眼镜在流水线、仓位上对货物分拣时,经常需要查找具有特定属性的物品。例如,为了追溯批次,需要分拣出特定发货方在特定时间发出的特定批次货物,这里的特定属性包括:特定发货方、特定时间、特定批次号等。在流水线分拣、仓位分拣、批次分拣中可通过人工逐一扫码分拣出所需物品。但是,当有多种不同特定属性需要同时分拣时,现有方式只能对物品逐一扫码分拣,无法做到按照特定属性并发分拣,分拣效率极低。
技术实现思路
1、本申请实施例提供一种多类别目标物的分拣方法、ar眼镜和系统,用于解决现有技术中对批量的物品逐一分拣,导致的分拣效率较低的问题。
2、第一方面,本申请实施例提供一种多类别目标物的分拣方法,包括:
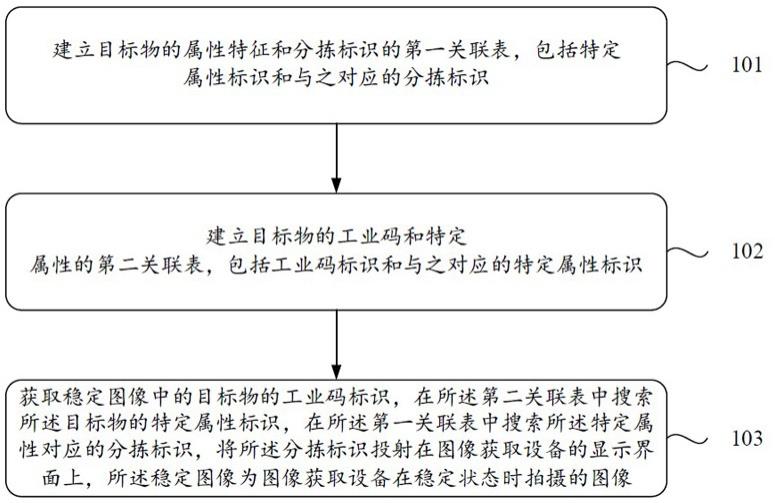
3、建立目标物的特定属性和分拣标识的第一关联表,包括特定属性标识和与之对应的分拣标识;
4、建立目标物的工业码和特定属性的第二关联表,包括工业码标识和与之对应的所述特定属性标识;
5、获取包含目标物的图像,判断所述图像是否为稳定图像,若是,则获取所述图像中1个或多个目标物的工业码标识,在所述第二关联表中搜索所述工业码标识的特定属性标识,在所述第一关联表中搜索所述特定属性标识对应的分拣标识,将所述分拣标识投射于图像的显示界面上。
6、进一步的,所述判断所述图像是否为稳定图像的方法包括:
7、确定图像的第一最大感受野,生成包含多个目标物位置标识的第一二维图,并计算所述第一二维图中多个目标物位置所对应的第一重心;
8、间隔预设时长后,确定图像的第二最大感受野,生成包含多个目标物位置标识的第二二维图,并计算所述第二二维图中多个目标物位置所对应的第二重心;
9、响应于第一二维图中的工业码数量等于第二二维图中的工业码数量且第一重心和第二重心的位置差小于设定阈值,确定所述第一二维图和或第二二维图为稳定图像。
10、进一步的,采用yolo算法识别所述目标物的工业码。
11、进一步的,所述最大感受野获得方法包括:
12、通过yolo算法的主干层提取图像特征;
13、越过图像颈部,将所提取的图像特征输入至特征发现器,获得最大感受野的图像。
14、进一步的,所述将所述分拣标识投射于图像的显示界面上,包括在工业码所在位置或目标物所在位置,显示所述工业码标识的目标物所对应的分拣标识。
15、进一步的,所述第一关联表和所述第二关联表采用json形式保存。
16、第二方面,本申请实施例提供一种存储器,其上存储有计算机程序,该程序被处理器执行时实现本申请中任一实施例所述的方法。
17、第三方面,本申请实施例提供一种电子设备,包含存储器、处理器及存储在存储器上并可在处理器运行的计算机程序,所述处理器被配置为执行所述计算机程序时用于实现本申请中任一实施例所述的方法。
18、第四方面,本申请实施例提供一种ar眼镜,包括:
19、第一关联模块,用于建立目标物的特定属性和分拣标识的第一关联表,包括特定属性标识和与之对应的分拣标识,所述分拣标识为用于体现目标物自定义属性的标识;
20、第二关联模块,用于建立目标物的工业码和特定属性的第二关联表,包括工业码标识和与之对应的所述特定属性标识;以及,
21、第一处理模块,用于获取包含目标物的图像,判断所述图像是否为稳定图像,若是,则获取所述图像中1个或多个目标物的工业码标识,在所述第二关联表中搜索所述工业码标识的特定属性标识,在所述第一关联表中搜索所述特定属性标识对应的分拣标识,将所述分拣标识投射于ar眼镜的图像的显示界面上。
22、第五方面,本申请实施例提供一种多类别目标物的分拣系统,
23、包括分拣客户端、属性匹配服务器、ar眼镜外部设备和ar眼镜;
24、所述分拣客户端包括特定属性处理模块,用于客户端设定分拣标识;
25、所述属性匹配服务器,用于将分拣标识保存至数据库,所述数据库包含所述第一关联表和第二关联表;所述属性匹配服务器还用于接收ar眼镜外部设备发送的工业码图像,解析工业码,并将解析后的工业码与分拣标识相匹配,将所述目标物的分拣标识返回至ar眼镜外部设备;
26、所述ar眼镜和/或ar眼镜外部设备,用于判定所述图像是否为稳定图像;所述ar眼镜外部设备,用于接收ar眼镜发送的图像,识别和提取出图像中的工业码,发送至属性匹配服务器,并接收属性匹配服务器返回的与工业码相对应的分拣标识;
27、所述ar眼镜,用于摄制图像并发送至ar眼镜外部设备,并将ar眼镜外部设备所标注的分拣特征标识显示在ar眼镜中。
28、本申请实施例采用的上述至少一个技术方案能够达到以下有益效果:可同时对拍照的多个工业码进行识别,并对识别出的工业码分类标注分拣标识,极大的提高分拣效率。
技术特征:
1.一种多类别目标物的分拣方法,其特征在于,包括:
2.如权利要求1所述的一种多类别目标物的分拣方法,其特征在于,判断所述图像是否为稳定图像的方法包括:
3.如权利要求1所述的一种多类别目标物的分拣方法,其特征在于,采用yolo算法识别所述目标物的工业码。
4.如权利要求2所述的一种多类别目标物的分拣方法,其特征在于,最大感受野的获得方法包括:
5.如权利要求1所述的一种多类别目标物的分拣方法,其特征在于,所述将所述分拣标识投射于图像的显示界面上,包括:在工业码所在位置或目标物所在位置,显示所述工业码标识的目标物所对应的分拣标识。
6.如权利要求1所述的一种多类别目标物的分拣方法,其特征在于,所述第一关联表和所述第二关联表采用json形式保存。
7.一种存储器,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1-6中任一所述的方法。
8.一种电子设备,包含存储器、处理器及存储在存储器上并可在处理器运行的计算机程序,其特征在于,所述处理器被配置为执行所述计算机程序时实现如权利要求1-6中任一所述的方法。
9.一种ar眼镜,其特征在于,包括:
10.一种多类别目标物的分拣系统,用于实现权利要求1-6任意一项所述方法,其特征在于,包括分拣客户端、属性匹配服务器、ar眼镜外部设备和ar眼镜;
技术总结
本申请公开了一种多类别目标物的分拣方法,包括:建立目标物的特定属性和分拣标识的第一关联表,包括特定属性标识和与之对应的分拣标识;建立目标物的工业码和特定属性的第二关联表,包括工业码标识和与之对应的所述特定属性标识;获取包含目标物的图像,判断所述图像是否为稳定图像,若是,则获取所述图像中所有目标物的工业码标识,在所述第二关联表中搜索所述目标物的特定属性标识,在所述第一关联表中搜索所述特定属性标识对应的分拣标识,将所述分拣标识投射于图像的显示界面上。本申请还包含实现所述方法的AR眼镜和系统。本申请解决现有技术对批量物品逐一分拣效率较低的问题。
技术研发人员:沈爽,康海利,赵曦,吴喆
受保护的技术使用者:中国邮电器材集团有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!