立体卫星影像精度质检的方法、装置和电子设备与流程
本申请涉及摄影测量与遥感,尤其是涉及一种立体卫星影像精度质检的方法、装置和电子设备。
背景技术:
1、目前,在进行摄影测量时,现有的技术中尽管有利用连接点对立体模型接边精度进行检查,但是在提取同名点时,使用人工刺点的方法不仅费事费力,且结果过度依赖于人工刺点精度。而使用自动匹配连接点方法时,在纹理质量较差等情况下极有可能匹配出错点。
技术实现思路
1、本申请的目的在于提供一种立体卫星影像精度质检的方法、装置和电子设备,可以自动剔除错误的连接点,同时引入多度控制点用来同步检查绝对精度。
2、第一方面,本发明提供一种立体卫星影像精度质检的方法,所述方法包括:
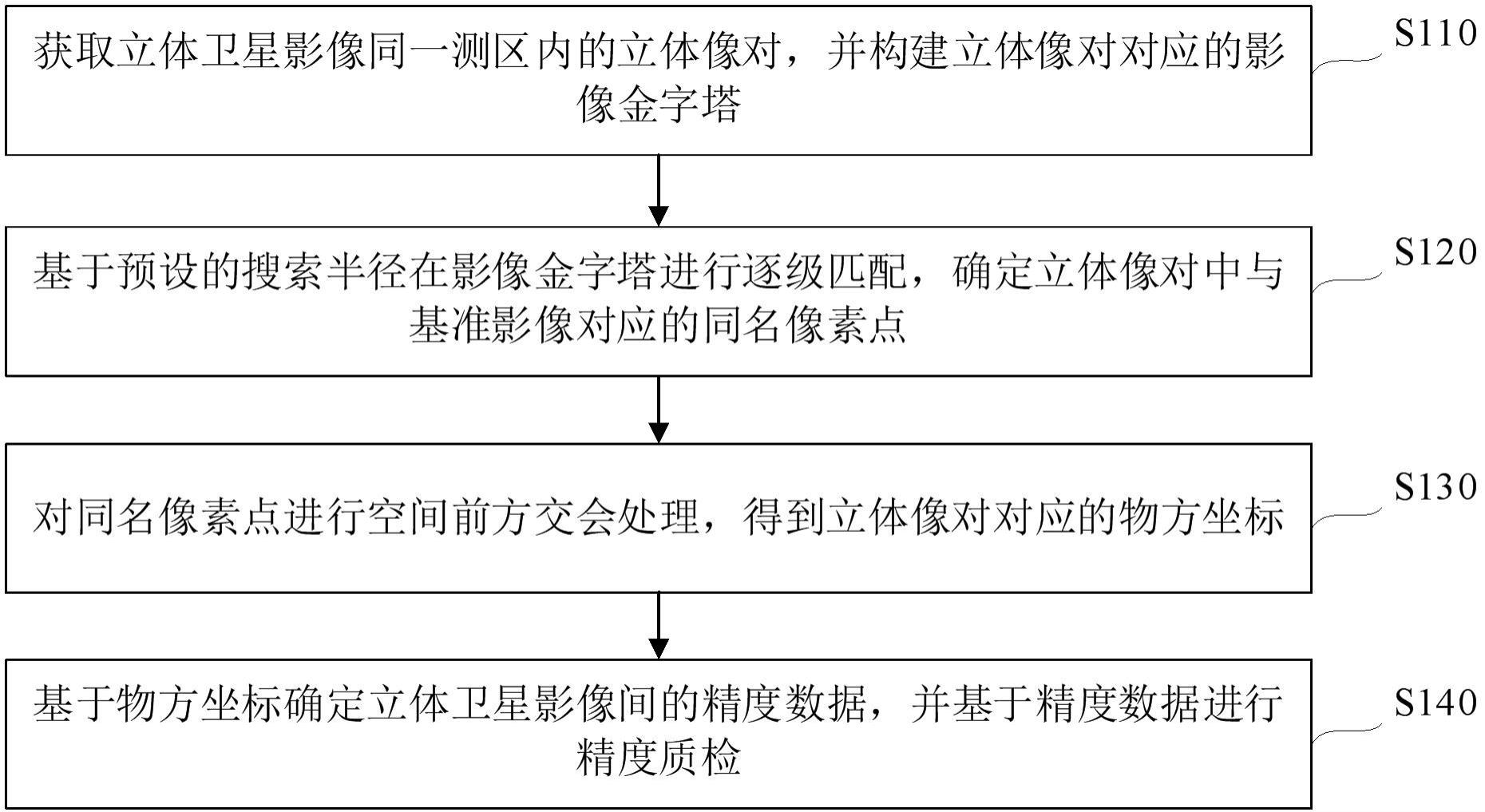
3、获取立体卫星影像同一测区内的立体像对,并构建所述立体像对对应的影像金字塔;
4、基于预设的搜索半径在所述影像金字塔进行逐级匹配,确定所述立体像对中与基准影像对应的同名像素点;
5、对所述同名像素点进行空间前方交会处理,得到所述立体像对对应的物方坐标;
6、基于所述物方坐标确定立体卫星影像间的精度数据,并基于所述精度数据进行精度质检。
7、在可选的实施方式中,所述影像金字塔包括至少两级分辨率的影像数据;基于预设的搜索半径在所述影像金字塔进行逐级匹配,确定所述立体像对中与基准影像对应的同名像素点,包括:
8、在所述立体像对中提取局部窗口内灰度梯度最大点位,确定为待匹配特征点;
9、以所述待匹配特征点为中心,基于预设的匹配模板读取待匹配影像数据块;
10、根据所述立体像对与所述基准影像的位置关系和预设的搜索半径在所述影像金字塔中进行逐级匹配,确定所述立体像对中与基准影像对应的同名像素点。
11、在可选的实施方式中,根据所述立体像对与所述基准影像的位置关系和预设的搜索半径在所述影像金字塔中进行逐级匹配,确定所述立体像对中与基准影像对应的同名像素点,包括:
12、根据所述立体像对与所述基准影像的位置关系在所述基准影像中确定搜索区域;
13、在所述搜索区域中基于预设的搜索半径在所述影像金字塔进行窗口滑动,在滑动过程中进行逐级匹配,计算所述待匹配特征点与匹配到的目标连接点的相关系数;所述预设的匹配模板的尺寸小于所述预设的搜索半径的尺寸;
14、基于所述相关系数确定所述立体像对中与基准影像对应的同名像素点。
15、在可选的实施方式中,在所述搜索区域中基于预设的搜索半径在所述影像金字塔进行窗口滑动,在滑动过程中进行逐级匹配,计算所述待匹配特征点与匹配到的目标连接点的相关系数,包括:
16、在所述搜索区域中基于预设的搜索半径在所述影像金字塔的预设初始层进行窗口滑动;
17、在进行窗口滑动时,如果匹配到目标连接点,则基于所述目标连接点的位置在预设初始层的下一层进行匹配搜索;如果未匹配到目标连接点,则增大所述预设的搜索半径的值,并通过增大后的搜索半径在预设初始层进行匹配搜索,当匹配到目标连接点后,基于所述目标连接点的位置在预设初始层的下一层进行匹配搜索;其中,所述预设初始层的下一层的分辨率大于所述预设初始层的分辨率;
18、在所述影像金字塔进行逐级循环匹配搜索,直至循环到所述影像金字塔的结束层,计算所述待匹配特征点与所述结束层中匹配到的目标连接点的相关系数。
19、在可选的实施方式中,所述方法还包括:
20、在进行逐级匹配搜索时,基于区域网平差面模型对匹配到的目标连接点进行处理,得到平差后目标连接点对应的残差向量;
21、基于所述残差向量和预设残差阈值确定所述目标连接点中的误差点,并将所述误差点剔除。
22、在可选的实施方式中,立体卫星影像同一测区内的立体像对包括第一影像和第二影像;所述同名像素点包括位于所述第一影像的第一连接点和位于第二影像的第二连接点,所述第一连接点和所述第二连接点互为同名点;
23、对所述同名像素点进行空间前方交会处理,得到所述立体像对对应的物方坐标,包括:
24、基于所述第一连接点的坐标和所述第二连接点的坐标确定同名像素点交会在地面的地面像点;
25、基于所述地面像点和有理函数模型进行计算,确定所述立体像对对应的物方坐标。
26、在可选的实施方式中,基于所述精度数据进行精度质检,包括:
27、基于多度控制点和/或误差评定参量进行精度质检;其中,所述多度控制点为所述立体像对中由外业控制点导入或与基准影像叠加数字高程模型匹配得到的同名像点。
28、第二方面,本发明提供一种立体卫星影像精度质检的装置,所述装置包括:
29、影像金字塔构建模块,用于获取立体卫星影像同一测区内的立体像对,并构建所述立体像对对应的影像金字塔;
30、逐级匹配模块,用于基于预设的搜索半径在所述影像金字塔进行逐级匹配,确定所述立体像对中与基准影像对应的同名像素点;
31、前方交会处理模块,用于对所述同名像素点进行空间前方交会处理,得到所述立体像对对应的物方坐标;
32、精度质检模块,用于基于所述物方坐标确定立体卫星影像间的精度数据,并基于所述精度数据进行精度质检。
33、第三方面,本发明提供一种电子设备,包括处理器和存储器,所述存储器存储有能够被所述处理器执行的计算机可执行指令,所述处理器执行所述计算机可执行指令以实现前述实施方式任一项所述的立体卫星影像精度质检的方法。
34、第四方面,本发明提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机可执行指令,所述计算机可执行指令在被处理器调用和执行时,计算机可执行指令促使处理器实现前述实施方式任一项所述的立体卫星影像精度质检的方法。
35、本申请提供的立体卫星影像精度质检的方法、装置和电子设备,首先获取立体卫星影像同一测区内的立体像对,并构建所述立体像对对应的影像金字塔,基于预设的搜索半径在所述影像金字塔进行逐级匹配,确定所述立体像对中与基准影像对应的同名像素点,对所述同名像素点进行空间前方交会处理,得到所述立体像对对应的物方坐标,基于所述物方坐标确定立体卫星影像间的精度数据,并基于所述精度数据进行精度质检。该方法可以自动剔除错误的连接点,同时引入多度控制点用来同步检查绝对精度。
技术特征:
1.一种立体卫星影像精度质检的方法,其特征在于,所述方法包括:
2.根据权利要求1所述的立体卫星影像精度质检的方法,其特征在于,所述影像金字塔包括至少两级分辨率的影像数据;基于预设的搜索半径在所述影像金字塔进行逐级匹配,确定所述立体像对中与基准影像对应的同名像素点,包括:
3.根据权利要求2所述的立体卫星影像精度质检的方法,其特征在于,根据所述立体像对与所述基准影像的位置关系和预设的搜索半径在所述影像金字塔中进行逐级匹配,确定所述立体像对中与基准影像对应的同名像素点,包括:
4.根据权利要求3所述的立体卫星影像精度质检的方法,其特征在于,在所述搜索区域中基于预设的搜索半径在所述影像金字塔进行窗口滑动,在滑动过程中进行逐级匹配,计算所述待匹配特征点与匹配到的目标连接点的相关系数,包括:
5.根据权利要求4所述的立体卫星影像精度质检的方法,其特征在于,所述方法还包括:
6.根据权利要求1所述的立体卫星影像精度质检的方法,其特征在于,立体卫星影像同一测区内的立体像对包括第一影像和第二影像;所述同名像素点包括位于所述第一影像的第一连接点和位于第二影像的第二连接点,所述第一连接点和所述第二连接点互为同名点;
7.根据权利要求6所述的立体卫星影像精度质检的方法,其特征在于,基于所述精度数据进行精度质检,包括:
8.一种立体卫星影像精度质检的装置,其特征在于,所述装置包括:
9.一种电子设备,其特征在于,包括处理器和存储器,所述存储器存储有能够被所述处理器执行的计算机可执行指令,所述处理器执行所述计算机可执行指令以实现权利要求1至7任一项所述的立体卫星影像精度质检的方法。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机可执行指令,所述计算机可执行指令在被处理器调用和执行时,计算机可执行指令促使处理器实现权利要求1至7任一项所述的立体卫星影像精度质检的方法。
技术总结
本申请提供了一种立体卫星影像精度质检的方法、装置和电子设备,涉及摄影测量与遥感技术领域,该方法包括:获取立体卫星影像同一测区内的立体像对,并构建立体像对对应的影像金字塔;基于预设的搜索半径在影像金字塔进行逐级匹配,确定立体像对中与基准影像对应的同名像素点;对同名像素点进行空间前方交会处理,得到立体像对对应的物方坐标;基于物方坐标确定立体卫星影像间的精度数据,并基于精度数据进行精度质检。本申请可以自动剔除错误的连接点,同时引入多度控制点用来同步检查绝对精度。
技术研发人员:葛慧斌,王宇翔,邓伟,廖通逵,张金金,路聚峰,巴晓娟,何珍,张纪华
受保护的技术使用者:航天宏图信息技术股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!