一种自动驾驶汽车行驶风险模型的参数标定方法
本公开属于驾驶安全,特别涉及一种自动驾驶汽车行驶风险模型的参数标定方法。
背景技术:
1、随着自动驾驶技术的快速发展,l1、l2级别自动驾驶技术已经趋于成熟并开始了商业化量产。各研究机构和汽车厂商开始着力于l3、l4高级别自动驾驶技术研发,并积极推动开放道路测试,智能汽车也被公众逐渐熟知和接受。l3级以上自动驾驶决策控制主体由人类驾驶员向计算机系统转变,其驾驶表现也受到了人们的广泛关注。特别是在交通安全方面,能否像人类一样识别道路交通风险并采取合适驾驶策略以获取人类信任,是实现高级别自动驾驶大规模商业化应用需要解决的关键问题。
2、人类对驾驶风险的认知一直是交通领域的热点问题。现有技术中,通常预设一些行车风险辨识模型,提供碰撞预警或驾驶风险信息支撑自动驾驶决策与控制,其辨识的准确性直接关系到自动驾驶车辆的安全运行表现。然而,车辆驾驶是一个极其动态的过程,行车风险与自车状态、道路线形以及其他交通参与者的运动状态信息紧密相关并动态时变。传统的风险模型标定一般通过开展任务型或场景型驾驶测试,要求驾驶员在完成驾驶任务后填写调查问卷进行数据分析和参数标定,无法精确捕捉场景高度时变性所带来的认知风险变化,导致行车风险辨识模型标定不准,难以支撑自动驾驶的决策控制能力向类人水平靠近,影响自动驾驶技术的发展成熟和商业化应用。
技术实现思路
1、本公开旨在至少在一定程度上解决相关技术中的技术问题之一。
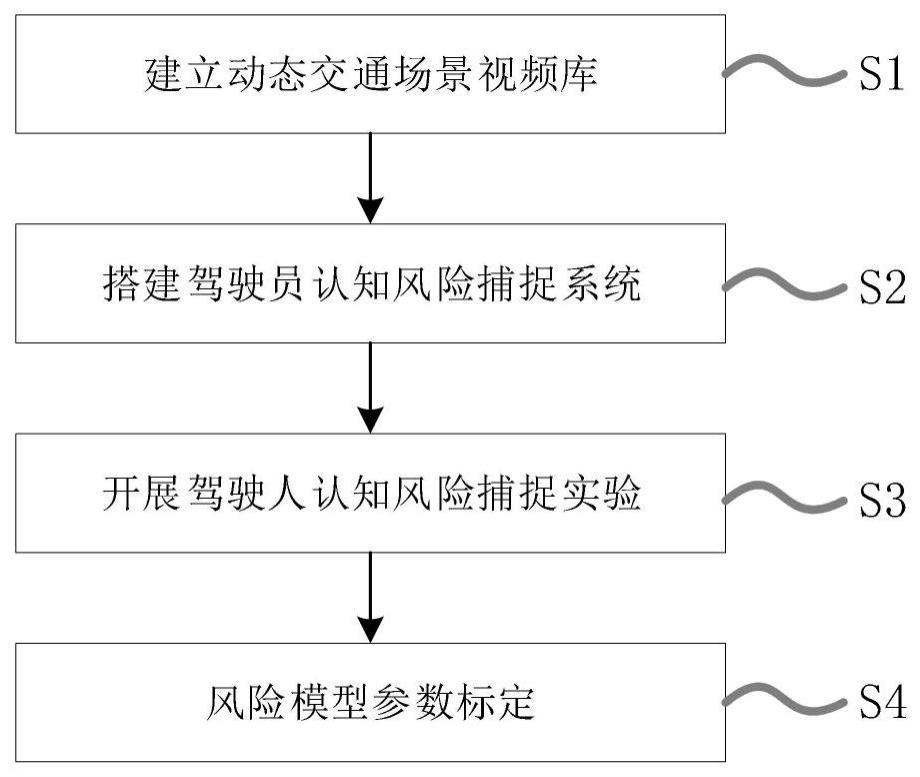
2、为此,本公开实施提供的自动驾驶汽车行驶风险模型的参数标定方法,将动态交通场景信息与驾驶员风险感知的时变信号相匹配,能够提升行驶风险模型的准确性,所述参数标定方法包括:
3、设计包含低、中、高三种复杂度类型的动态交通场景,利用基于实车道路测试或模拟驾驶仿真设备录制的驾驶员视角的行车视频并记录各个时刻自车和周围其他交通参与者的运行状态,以此构建包含交通元素状态信息的动态交通场景数据库;
4、搭建驾驶员认知风险捕捉系统,所述驾驶员认知风险捕捉系统能够播放所述动态交通场景数据库内的视频、记录用于反映驾驶员认知风险的时变信号捕捉设备的反馈数据,并对所述动态交通场景视频库内的视频和所述时变信号捕捉设备的反馈数据在时间上进行匹配和对齐;
5、利用所述驾驶员认知风险捕捉系统对不同驾驶员在所述动态交通场景下进行测试,记录时间同步的交通元素状态信息和时变信号捕捉设备的反馈数据,形成实验数据集;
6、利用所述实验数据集,首先分析低复杂度场景数据,标定所述行驶风险模型的空间维度参数;在此基础上分析中复杂度场景数据,标定所述行驶风险模型的时间维度参数;最后分析高复杂度场景数据,标定所述行驶风险模型的驾驶员的注意力维度参数。
7、在一些实施例中,所述动态交通场景中的低复杂度场景包含一辆静止的自车和一个运动的其他交通参与者,其他交通参与者以一定速度和角度朝向或远离自车运行。
8、在一些实施例中,所述动态交通场景中的中复杂度场景包含一辆运动的自车和一个运动的其他交通参与者,自车以一定速度向前运行,其他交通参与者以一定速度和角度朝向或远离自车运行。
9、在一些实施例中,所述动态交通场景中的高复杂度场景包含一辆运动的自车和多个运动的其他交通参与者,自车以一定速度向前运行,其他交通参与者在遵循交通规则的情况下运行。
10、在一些实施例中,所述自车和周围其他交通参与者的运行状态包括记录时间、自车位置、自车朝向角、自车运行速度,自车加速度、自车类型,周围其他交通参与者位置、周围其他交通参与者朝向角、周围其他交通参与者运行速度、周围其他交通参与者加速度和周围其他交通参与者类型。
11、在一些实施例中,设计所述动态交通场景中,需要考虑不同的交通参与者类型、初始速度和初始位置的设置。
12、在一些实施例中,所述交通参与者类型分为:机动车、非机动车、行人和静止障碍物;其中,所述机动车包括:公交车、大型货车、卡车、中型客车、小汽车和摩托车;所述非机动车包括:三轮车和自行车;静止障碍物包括:锥桶、灯杆、隔离带、栏杆和路缘石;交通参与者的初始速度为符合道路限速法规的任意速度;交通参与者的初始位置为符合道路交通规则的任意位置。
13、在一些实施例中,利用所述驾驶员认知风险捕捉系统对不同驾龄、不同性别、不同年龄段的驾驶员在所述动态交通场景下分别进行测试。
14、在一些实施例中,利用所述实验数据集对所述行驶风险模型的参数进行标定,包括:
15、根据所述实验数据集,将各个时刻的自车和周围其他交通参与者状态作为所述行驶风险模型的输入,将所述行驶风险模型的输出作为行驶风险估计值,并保留所述行驶风险模型的计算过程数据;
16、利用低、中复杂度场景下的计算过程数据,采用控制变量的方法,筛选行驶风险估计值仅受单个待标定参数影响的数据子集,逐个调整所述行驶风险模型中的时间和空间维度参数,使得低、中复杂度场景下的行驶风险估计值无限趋近于低、中复杂度场景下的真值,即实验数据集中低、中复杂度场景下来自于时变信号捕捉设备的反馈数据;
17、利用高复杂度场景下的计算过程数据,调整所述行驶风险模型中驾驶员的注意力维度参数,使得高复杂度场景下的行车风险估计值无限趋近于高复杂度场景下的真值,即实验数据集中高复杂度场景下来自于时变信号捕捉设备的反馈信号。
18、在一些实施例中,所述行驶风险模型为:
19、
20、
21、
22、
23、
24、其中,rt表示t时刻自车的行车风险;i表示以t时刻为起始的计算时域中的时刻编号;j表示t时刻周围其他交通参与者的编号,其总数量为j;gj表示自车与周围其他交通参与者j以计算时域中第i个时刻的运行状态发生假设性碰撞将导致的碰撞双方总体损伤,将该损伤定义为潜在碰撞损伤;ωd表示距离衰减系数;ωi表示时间衰减系数;αj表示场景中第j辆他车对于最终风险的贡献权重,为待标定的驾驶员的注意力维度参数;表示在计算时域中第i个时刻周围其他交通参与者j与自车轮廓之间的最短距离;表示在计算时域中第i个时刻自车的速度;表示在计算时域中第i个时刻周围其他交通参与者j的速度;表示在计算时域中第i个时刻周围其他交通参与者j的速度方向与自车的速度方向夹角;表示自车的安全特征参数;表示周围其他交通参与者j的安全特征参数;c为待标定的空间维度参数,d为待标定的时间维度参数。
25、本公开具有以下特点及有益效果:
26、本公开提供的一种自动驾驶汽车行驶风险模型的参数标定方法,利用具有高敏感度的时变信号捕捉设备实时记录驾驶员的风险感知数值,并与交通场景中周车和道路信息相匹配,实现类人认知行驶风险模型的参数标定。与现有技术相比,本公开能够适应动态时变交通场景下的驾驶人认知风险精确、高敏感的捕捉需求,为驾驶员认知风险的研究提供支持。
技术特征:
1.一种自动驾驶汽车行驶风险模型的参数标定方法,其特征在于,包括:
2.根据权利要求1所述的参数标定方法,其特征在于,所述动态交通场景中的低复杂度场景包含一辆静止的自车和一个运动的其他交通参与者,其他交通参与者以一定速度和角度朝向或远离自车运行。
3.根据权利要求1所述的参数标定方法,其特征在于,所述动态交通场景中的中复杂度场景包含一辆运动的自车和一个运动的其他交通参与者,自车以一定速度向前运行,其他交通参与者以一定速度和角度朝向或远离自车运行。
4.根据权利要求1所述的参数标定方法,其特征在于,所述动态交通场景中的高复杂度场景包含一辆运动的自车和多个运动的其他交通参与者,自车以一定速度向前运行,其他交通参与者在遵循交通规则的情况下运行。
5.根据权利要求1所述的参数标定方法,其特征在于,所述自车和周围其他交通参与者的运行状态包括记录时间、自车位置、自车朝向角、自车运行速度,自车加速度、自车类型,周围其他交通参与者位置、周围其他交通参与者朝向角、周围其他交通参与者运行速度、周围其他交通参与者加速度和周围其他交通参与者类型。
6.根据权利要求1所述的参数标定方法,其特征在于,设计所述动态交通场景中,需要考虑不同的交通参与者类型、初始速度和初始位置的设置。
7.根据权利要求6所述的参数标定方法,其特征在于,所述交通参与者类型分为:机动车、非机动车、行人和静止障碍物;其中,所述机动车包括:公交车、大型货车、卡车、中型客车、小汽车和摩托车;所述非机动车包括:三轮车和自行车;静止障碍物包括:锥桶、灯杆、隔离带、栏杆和路缘石;交通参与者的初始速度为符合道路限速法规的任意速度;交通参与者的初始位置为符合道路交通规则的任意位置。
8.根据权利要求1所述的参数标定方法,其特征在于,利用所述驾驶员认知风险捕捉系统对不同驾龄、不同性别、不同年龄段的驾驶员在所述动态交通场景下分别进行测试。
9.根据权利要求1所述的参数标定方法,其特征在于,利用所述实验数据集对所述行驶风险模型的参数进行标定,包括:
10.根据权利要求1~9中任一项所述的参数标定方法,其特征在于,所述行驶风险模型为:
技术总结
本公开提供的一种自动驾驶汽车行驶风险模型的参数标定方法,包括:设计包含低、中、高三种复杂度类型的动态交通场景,构建包含交通元素状态信息的动态交通场景数据库;搭建驾驶员认知风险捕捉系统,用于播放动态交通场景数据库内的视频、记录用于反映驾驶员认知风险的时变信号捕捉设备的反馈数据并将两者在时间上对齐;进行驾驶员认知风险捕捉实验,利用时间同步的交通元素状态信息和所述反馈数据形成实验数据集;通过控制变量方法,逐步利用低、中、高复杂度场景数据对行驶风险模型的参数进行标定。本公开将动态交通场景信息与驾驶员风险感知的时变信号相匹配,能够提升行驶风险模型的准确性。
技术研发人员:李升波,陈晨,吕尧,兰志前,朴盈汐,聂冰冰,成波
受保护的技术使用者:清华大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!