作业机械工况识别方法、装置、设备及作业机械与流程
本发明涉及工况识别,尤其涉及一种作业机械工况识别方法、装置、设备及作业机械。
背景技术:
1、为了更好的监管作业机械,需要识别作业机械的工况状态。在现有技术中,主要通过两种方式进行作业机械的工况识别,方式一,依赖作业机械本体的状态进行识别,以确定作业机械的工况状态,但是该方式获取数据量较多,计算复杂,最终导致确定效率较低,耗时较长;方式二,通过在作业机械安装全球定位系统(gps)来确定作业机械的工况状态,但是该方式对于土方作业机械不适应,导致确定结果准确率较低。
2、因此,如何快速、精准的识别作业机械的工况状态是目前业界亟待解决的重要课题。
技术实现思路
1、本发明提供一种作业机械工况识别方法、装置、设备及作业机械,用以解决现有技术识别作业机械的工况状态时出现的效率低、耗时长以及准确率低的缺陷,实现快速、精准的识别作业机械的工况状态。
2、本发明提供一种作业机械工况识别方法,包括:
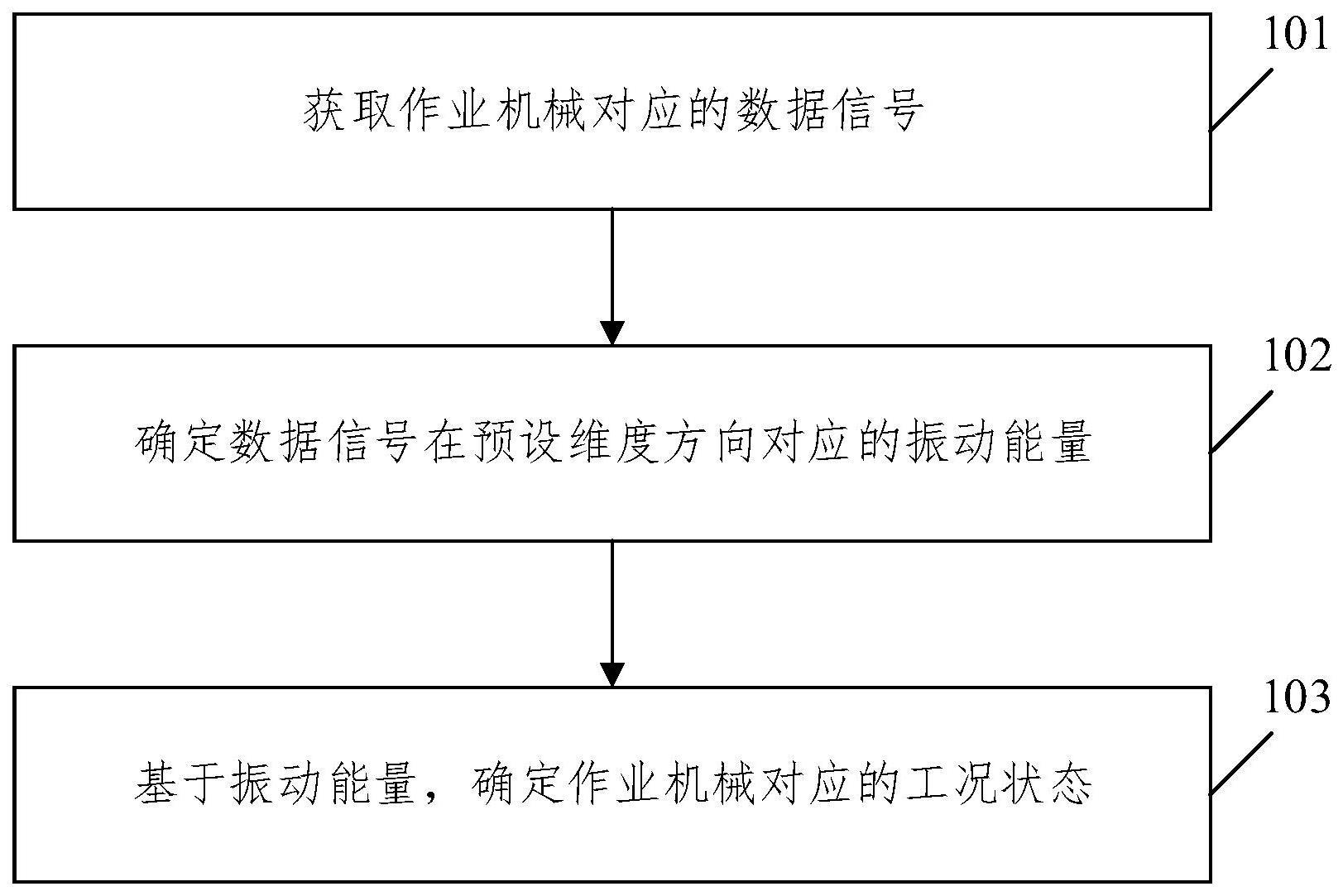
3、获取作业机械对应的数据信号,其中,所述数据信号为安装在所述作业机械上的识别设备采集的振动信号;
4、确定所述数据信号在预设维度方向对应的振动能量;
5、基于所述振动能量,确定所述作业机械对应的工况状态。
6、根据本发明提供的一种作业机械工况识别方法,所述基于所述振动能量,确定所述作业机械对应的工况状态,包括:
7、在确定所述振动能量在第一预设时长内持续大于第一预设阈值的情况下,确定所述工况状态为非静止状态;
8、在确定所述振动能量在第二预设时长内持续小于所述第二预设阈值的情况下,确定所述工况状态为静止状态。
9、根据本发明提供的一种作业机械工况识别方法,所述预设维度方向包括x轴方向和y轴方向;
10、所述确定所述工况状态为非静止状态,包括:
11、确定所述数据信号对应的功率谱;
12、基于所述功率谱,确定所述预设维度方向对应的低频能量占比,其中,所述低频能量占比为所述预设维度方向对应的低频能量与所述振动能量的比值;
13、在确定所述x轴方向对应的所述低频能量占比大于第三预设阈值,以及所述y轴方向对应的所述低频能量占比大于第四预设阈值的情况下,确定所述工况状态为所述运行状态。
14、根据本发明提供的一种作业机械工况识别方法,所述预设维度方向包括x轴方向、y轴方向和z轴方向;
15、所述确定所述工况状态为非静止状态,包括:
16、确定所述数据信号对应的功率谱;
17、基于所述功率谱,确定所述预设维度方向对应的主峰能量占比,其中,所述主峰能量占比为所述预设维度方向对应的主峰能量与所述振动能量的比值;
18、在确定所述x轴方向对应的所述主峰能量占比大于第五预设阈值,所述y轴方向对应的所述主峰能量占比大于第六预设阈值,以及所述z轴方向对应的所述主峰能量占比大于第七预设阈值的情况下,确定所述工况状态为所述怠速状态。
19、根据本发明提供的一种作业机械工况识别方法,所述确定所述预设维度方向对应的低频能量占比,包括:
20、基于所述数据信号的幅值、截至频率和信号主峰,得到低频能量;
21、计算所述低频能量与所述振动能量的比值,得到所述低频能量占比。
22、根据本发明提供的一种作业机械工况识别方法,所述确定所述预设维度方向对应的主峰能量占比,包括:
23、基于所述数据信号的幅值和信号主峰,得到主峰能量;
24、计算所述主峰能量与所述振动能量的比值,得到所述主峰能量占比。
25、根据本发明提供的一种作业机械工况识别方法,所述预设维度方向包括x轴方向、y轴方向和z轴方向;
26、所述确定所述数据信号在预设维度方向对应的振动能量,包括:
27、分别确定所述数据信号在x轴方向对应的第一能量、y轴方向对应的第二能量和z轴方向对应的第三能量;
28、将所述第一能量、第二能量和第三能量之和确定为所述振动能量。本发明还提供一种作业机械工况识别装置,包括:
29、获取模块,用于获取作业机械对应的数据信号,其中,所述数据信号为安装在所述作业机械上的识别设备采集的振动信号;
30、第一确定模块,用于确定所述数据信号在预设维度方向对应的振动能量;
31、第二确定模块,用于基于所述振动能量,确定所述作业机械对应的工况状态。
32、本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述的作业机械工况识别方法。
33、本发明还提供一种作业机械,包括如上任一项所述的作业机械工况识别装置,或,实现如上任一项所述的作业机械工况识别方法。
34、本发明提供的作业机械工况识别方法、装置、设备及作业机械,通过获取作业机械对应的数据信号,该数据信号为安装在作业机械上的识别设备采集的振动信号,可见,本发明采集的数据信号仅为识别设备采集的振动信号,数据量较少,提高了下面确定工况状态的计算速度,节约了时间成本;确定数据信号在预设维度方向对应的振动能量;基于振动能量,确定作业机械对应的工况状态,本发明仅通过确定数据信号的振动能量,便可以判定作业机械的工况状态,计算量小,耗时短,提高了工况状态的确定效率,并且,适应于各种作业机械,工况状态确定准确率高,实现了快速、精准的识别作业机械的工况状态。
技术特征:
1.一种作业机械工况识别方法,其特征在于,包括:
2.根据权利要求1所述的作业机械工况识别方法,其特征在于,所述基于所述振动能量,确定所述作业机械对应的工况状态,包括:
3.根据权利要求2所述的作业机械工况识别方法,其特征在于,所述预设维度方向包括x轴方向和y轴方向;
4.根据权利要求2所述的作业机械工况识别方法,其特征在于,所述预设维度方向包括x轴方向、y轴方向和z轴方向;
5.根据权利要求3所述的作业机械工况识别方法,其特征在于,所述确定所述预设维度方向对应的低频能量占比,包括:
6.根据权利要求4所述的作业机械工况识别方法,其特征在于,所述确定所述预设维度方向对应的主峰能量占比,包括:
7.根据权利要求1-6任一项所述的作业机械工况识别方法,其特征在于,所述预设维度方向包括x轴方向、y轴方向和z轴方向;
8.一种作业机械工况识别装置,其特征在于,包括:
9.一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1至7任一项所述的作业机械工况识别方法。
10.一种作业机械,其特征在于,包括如权利要求8所述的作业机械工况识别装置,或,实现如权利要求1至7任一项所述的作业机械工况识别方法。
技术总结
本发明涉及公开识别技术领域,提供一种作业机械工况识别方法、装置、设备及作业机械,方法包括:获取作业机械对应的数据信号,其中,数据信号为安装在作业机械上的识别设备采集的振动信号;确定数据信号在预设维度方向对应的振动能量;基于振动能量,确定作业机械对应的工况状态。本发明用以解决现有技术识别作业机械的工况状态时出现的效率低、耗时长以及准确率低的缺陷,实现快速、精准的识别作业机械的工况状态。
技术研发人员:解锡伟,周庆亮,宋小宁,王九州
受保护的技术使用者:盛景智能科技(嘉兴)有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!