基于光照补偿下的夜间车道线识别方法
本发明涉及属于智能网联汽车车道线识别领域,特别是一种基于光照补偿下的夜间车道线识别方法。
背景技术:
1、随着汽车工业进入4.0时代,汽车的智能化也越来越受到人们的关注。鉴于车道线识别对于自动驾驶汽车的重要性,国内外很多学者对于车道线识别进行了大量的研究,但大多是在正常光照条件下进行的。
2、在正常光照条件下车辆采集的道路图像清晰度高,车道线与背景路面对比度较为明显,可采用基于光流估计与背景建模的方法对图像进行处理,但是如果在夜间光照不良,车道线与背景对比度较小以及图像整体亮度较低的情况下,采用正常光照条件下的车道线识别方法来对图像进行处理,结果则不能满足夜间车道线识别的需要。
技术实现思路
1、本发明需要解决的技术问题是:针对夜间车辆采集的车道线信息存在照明不良,亮度较低,从而无法采用正常光照下的车道线识别方法等问题,提供一种基于光照补偿下的夜间车道线识别方法。
2、本发明是通过以下技术方案来实现的:
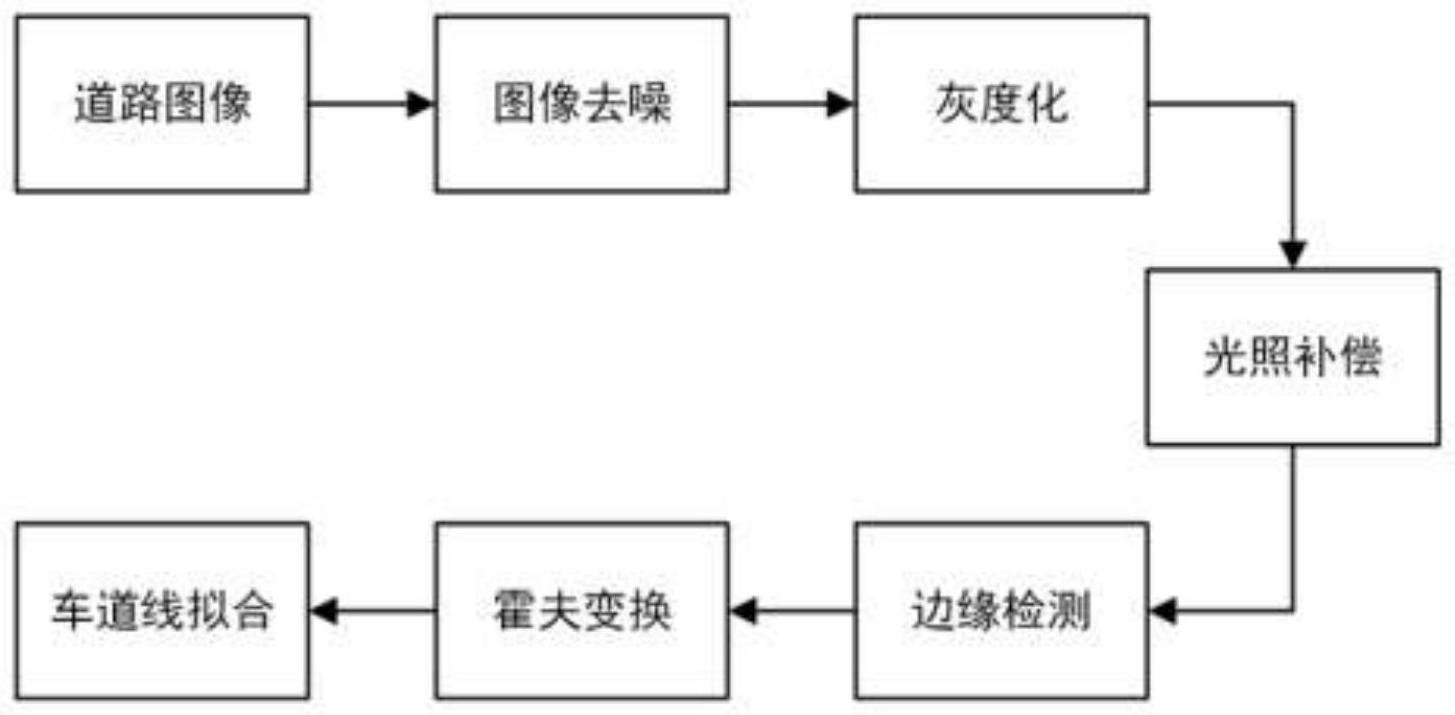
3、本发明提供的基于光照补偿下的夜间车道线识别方法,包括以下步骤:
4、(1)基于车道线颜色特征的加权平均值灰度化处理步骤:
5、根据车道线颜色在rgb空间中的颜色特征,结合人眼对色彩空间的敏感度不同,提出一种基于车道线颜色特征的加权平均值方法来对图像进行灰度化处理;
6、(2)基于参数调节的对数变换方法对图像进行光照补偿步骤:
7、选取一个基于灰度最值加权的强度参数和一个基于图像整体亮度变化的调节参数来对图像进行调节;
8、(3)采用一种组合形式对车道线图像进行光照补偿:
9、将局部直方图均衡、基于参数调节的对数变换以及全局直方图均衡三种方式组合到一起对低照明度下的车道线图像进行光照补偿。
10、上述方法步骤(1)中,可以采用以下方法对图像进行灰度化处理:
11、1)根据道路车道线白色和黄色两种颜色在rgb空间的颜色特征,在后续的加权计算公式时仅考虑r、g空间;
12、2)基于人眼敏感度的加权平均法中具体权重分配公式为:
13、gray(i,j)=0.299*r(i,j)+0.587*g(i,j)+0.114*b(i,j)
14、其中gray(i,j)为图像内该点灰度化后的灰度值;r(i,j)为该点在红色通道的灰度值;g(i,j)为该点在绿色通道的灰度值;b(i,j)为该点在蓝色通道的灰度值。
15、上述方法中,可以将r、g空间权重按照基于人眼对颜色的敏感程度的r、g权重比例关系进行分配:
16、
17、由上式得到基于车道线颜色特征的加权平均值灰度化公式:
18、gray(i,j)=0.337*r(i,j)+0.663*g(i,j)
19、其中:gray(i,j)为新的图像灰度化计算公式下得到的图像内该点的灰度值。
20、本发明基于图像亮度并不固定,所以灰度化公式需要有一个变化范围来进行修正,故可以对不同亮度下的图像进行处理,得到灰度化效果最好时的r、g空间权重分配,然后对数据进行拟合,得到的拟合直线解析式为:
21、m=-0.003*b+0.504
22、其中m为r空间所占权重,b为图像平均亮度。
23、本发明基于研究环境为光照不良,因此可以将亮度的范围选为20~90,代入直线解析式得到m的变化范围为0.234~0.444,然后在所述的灰度化公式中加入一个波动值0.1,使其几乎符合m的变化范围,即:
24、
25、上述方法的步骤(2)中,可以选取一个基于灰度最值加权的强度参数c和一个基于图像整体最佳对比度的调节参数a来对图像对数变换公式f(i,j)=c*log(a*g(i,j)+1)进行调节,其中f(i,j)、g(i,j)分别为图像输出和输入灰度值;
26、可以采用以下公式确定强度参数c的取值:
27、
28、其中a、b分别为最大输入灰度值g(i,j)max和最小输入灰度值g(i,j)min权重系数,且a+b=1。
29、上述方法中,可以在保持a=1不变的情况下,对a、b分别取值,由处理之后的结果发现,a越小,光照下的车道线变得更加模糊,由于图像对比度一直在变化,所以对于灰度最值的权重参数的选定也存在波动,选取9组不同对比度图像,对比度范围从44.56到135.99,发现上述9组对比度图像的最佳a取值均在0.98~1.00之间,因此a取值0.99,b取值0.01,上下波动0.01,则强度参数c的取值为:
30、
31、上述方法中,可以采用以下方法确定图像整体亮度变化的最佳调节参数a的取值:
32、在上述a=0.99,b=0.01的条件下对a进行取值,发现a取值越大时,图像会出现过亮现象,对9组不同亮度下的车道线进行了处理,得到各亮度下的最佳a值,然后对数据点进行拟合,得到拟合直线的解析式为:
33、a=-0.0017*b+0.258。
34、上述方法中,可以选取环境亮度在20~90之间,得到a值0.105~0.224,然后采用a的基准值0.16,上下浮动0.5,用于光照不良下的车道线识别:
35、
36、上述方法的步骤(3)中,可以在局部直方图均衡处理和对数变换之后得到的图像还存在图像整体呈现雾状的现象,canny边缘检测后会出现较多的多余的边缘信息,影响后续的车道线检测,于是再对两种图像变换处理后得到的图像进行全局直方图均衡,将局部直方图均衡、基于参数调节的对数变换以及全局直方图均衡三种方式组合到一起对低照明度下的车道线图像进行光照补偿。
37、本发明与现有技术相比具有以下的主要的优点:
38、1.提供了一种基于车道线颜色特征的加权平均值灰度化处理方法。根据车道线颜色在rgb空间中的特点,结合人眼对颜色的敏感程度进行权重分配,用此灰度化方法处理道路图像能够更好地突出车道线信息。
39、2.提出了一种基于参数调节的对数变换方法对图像进行光照补偿。选取一个基于灰度最值加权的强度参数和一个基于图像整体亮度变化的调节参数来对图像进行调节,并提出了一个波动范围,结果显示能较好地突出图像低灰度部分特征。
40、3.将局部直方图均衡、基于参数调节的对数变换以及全局直方图均衡三种方式组合到一起对低照明度下的车道线图像进行光照补偿,能很好地过滤掉多余信息,准确的识别出车道线。
41、总之,本发明具有能够准确突出并识别不同亮度道路低照明度下的车道线等优点。
技术特征:
1.一种基于光照补偿下的夜间车道线识别方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于光照补偿下的夜间车道线识别方法,其特征是步骤(1)中,采用以下方法对图像进行灰度化处理:
3.根据权利要求2所述的基于光照补偿下的夜间车道线识别方法,其特征是将r、g空间权重按照基于人眼对颜色的敏感程度的r、g权重比例关系进行分配:
4.根据权利要求2所述的基于光照补偿下的夜间车道线识别方法,其特征是对不同亮度下的图像进行处理,得到灰度化效果最好时的r、g空间权重分配,然后对数据进行拟合,得到的拟合直线解析式为:
5.根据权利要求4所述的基于光照补偿下的夜间车道线识别方法,其特征是亮度的范围选为20~90,代入直线解析式得到m的变化范围为0.234~0.444,然后在权利要求2所述的灰度化公式中加入一个波动值0.1,使其几乎符合m的变化范围,即:
6.根据权利要求1所述的基于光照补偿下的夜间车道线识别方法,其特征是步骤(2)中,选取一个基于灰度最值加权的强度参数c和一个基于图像整体最佳对比度的调节参数a来对图像对数变换公式f(i,j)=c*log(a*g(i,j)+1)进行调节,其中f(i,j)、g(i,j)分别为图像输出和输入灰度值;
7.根据权利要求6所述的基于光照补偿下的夜间车道线识别方法,其特征是在保持a=1不变,选取9组不同对比度图像,对比度范围从44.56到135.99,其中a取值0.98~1.00为最佳值,所以a取值0.99,b取值0.01,上下波动0.01,则强度参数c的取值为:
8.根据权利要求7所述的基于光照补偿下的夜间车道线识别方法,其特征是采用以下方法确定图像整体亮度变化的最佳调节参数a的取值:
9.根据权利要求8所述的基于光照补偿下的夜间车道线识别方法,其特征是选取环境亮度在20~90之间,得到a值0.105~0.224,然后采用a的基准值0.16,上下浮动0.5,用于光照不良下的车道线识别:
10.根据权利要求1所述的基于光照补偿下的夜间车道线识别方法,其特征是步骤(3)中,在局部直方图均衡处理和对数变换之后得到的图像还存在图像整体呈现雾状的现象,canny边缘检测后会出现较多的多余的边缘信息,影响后续的车道线检测,于是再对两种图像变换处理后得到的图像进行全局直方图均衡,将局部直方图均衡、基于参数调节的对数变换以及全局直方图均衡三种方式组合到一起对低照明度下的车道线图像进行光照补偿。
技术总结
本发明公开了一种基于光照补偿下的夜间车道线识别方法,包括:基于车道线颜色特征的加权平均值灰度化处理步骤,基于参数调节的对数变换方法对图像进行光照补偿步骤,以及采用了一种组合形式对车道线图像进行光照补偿步骤。本发明具有能够准确突出并识别不同亮度道路低照明度下的车道线等优点。
技术研发人员:张洪昌,唐本刊,汪琛,曾娟
受保护的技术使用者:武汉理工大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!