一种基于数字孪生的船舶运动可视化方法
本发明涉及水运交通领域,尤其是涉及一种基于数字孪生的船舶运动可视化方法。
背景技术:
1、数字孪生技术在船舶航行运营方面的应用研究受到水路运输领域的广泛关注。一种在中国专利文献上公开的“一种内河航道数字孪生场景的构建方法及装置”,其公开号:cn113223162,公开了通过三维构建航道进行执法管理,其侧重点是航道的三维构建,没有考虑到航道拥堵的情况管理。一种在中国专利文献上公开的“一种数字孪生航道构建方法及系统”,其公开号:cn114529680a,公开了接入航道泛在感知数据后的航道数字孪生场景下的运行管理,侧重点是数据的接入,并没有充分考虑多种数据的冗余和筛选。
2、中国专利申请号cn202111190105.4提供一种数字孪生船舶驱动方法和装置,涉及水运交通领域,该方法包括采用数据流引擎对数据报文进行数据清洗,基于航道中心线和航道岸线的矢量数据剔除所述数据报文中的异常数据报文,所述异常数据报文为表示所述船舶的定位处于所述航道岸线以外的所述数据报文;接收从客户端发送的初始化请求,基于所述初始化请求封装所述数据报文并返回至所述客户端,以使所述客户端基于所述数据报文在所述数字孪生场景中更新每艘所述船舶的位置。该申请公开了对船舶数据报文进行清洗,剔除了船舶的异常数据,但是没有考虑数据的采样周期和虚拟现实技术中帧更新频率的一致性,其所述的航迹平滑算法并没有考虑虚拟现实中船舶运动的稳定性,容易造成船舶运动画面的卡顿。
3、综上,当前缺少一种船舶运动状态监测方法,以解决现有方法没有考虑虚拟现实中船舶运动的稳定性,容易造成船舶运动画面的卡顿的问题。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种基于数字孪生的船舶运动可视化方法,从多个数据源获取现实中的船舶信息并进行解析,通过卡尔曼滤波对数字孪生船舶的运动状态进行更新,并动态调整孪生船舶运动状态更新频率,保证在运动状态更新时孪生船舶运动状态的平稳过渡,减少数据的回滚和跳变。
2、本发明的目的可以通过以下技术方案来实现:
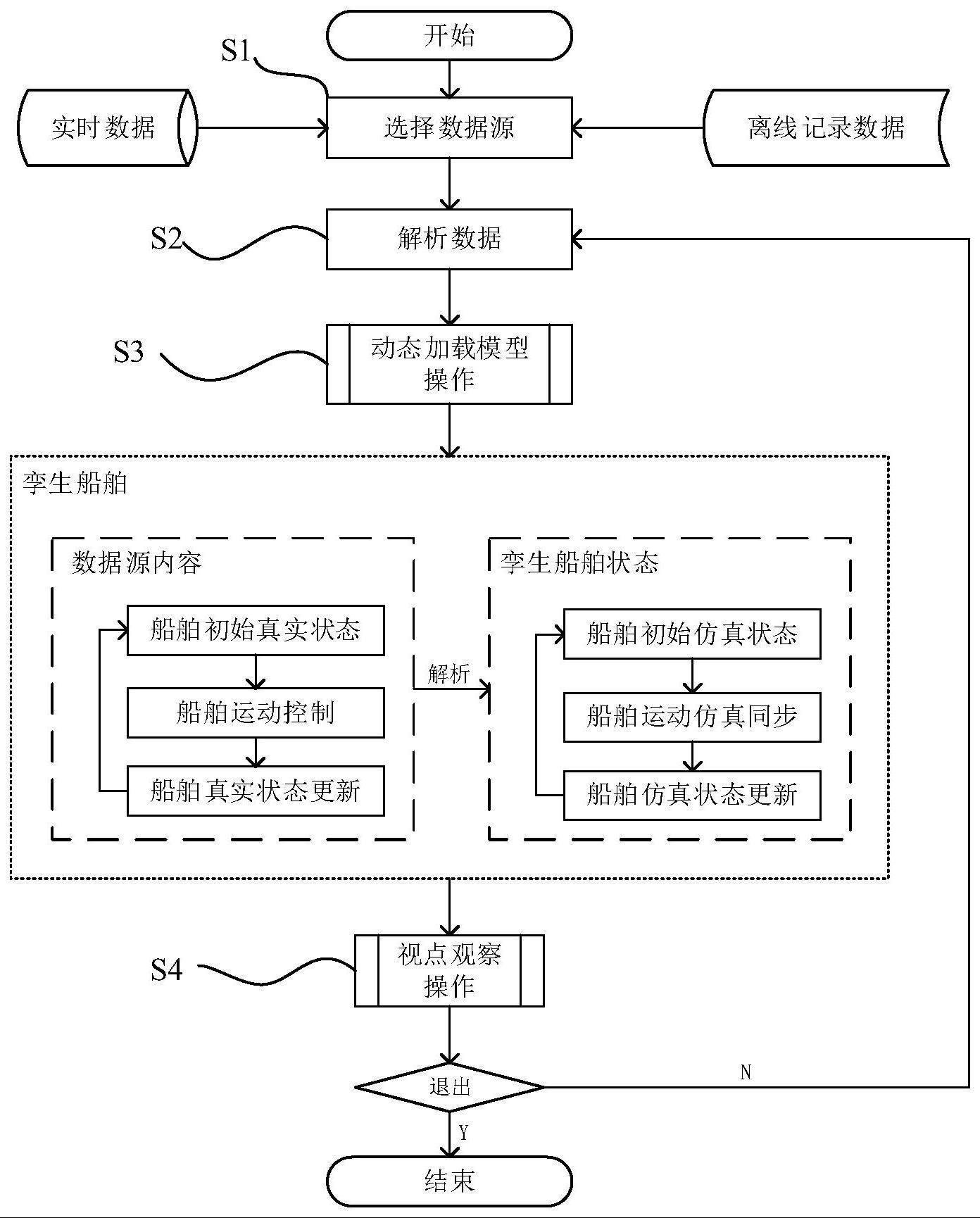
3、本发明提供了一种基于数字孪生的船舶运动可视化方法,包括如下步骤:
4、从多个数据源获取现实中的船舶信息,通过解析获取船舶状态数据;
5、基于所述船舶状态数据,加载预设的船舶模型以及与船舶位置相匹配的环境模型;
6、基于当前的船舶状态数据,通过卡尔曼滤波对数字孪生船舶的运动状态进行更新,在更新过程中,动态调整孪生船舶运动状态更新频率;
7、获取观察视点信息,基于船舶模型、环境模型、所述观察视点信息以及数字孪生船舶的运动状态,向可视化终端输出可视化信号。
8、作为优选的技术方案,所述的动态调整孪生船舶运动状态更新频率的实现过程包括如下步骤:
9、计算本次获取的船舶信息与上一次获取的船舶信息间的间隔时间t,基于所述间隔时间t,选取适当的孪生船舶运动状态更新频率f,使得数字孪生船舶的状态更新的间隔t=n/f与所述间隔时间t相同,其中,n为正整数。
10、作为优选的技术方案,所述的通过卡尔曼滤波对数字孪生船舶的运动状态进行更新的过程包括如下步骤:
11、基于现实中的所述船舶状态数据,获取数字孪生船舶的初始状态值;
12、基于所述初始状态值,通过卡尔曼滤波获取数字孪生船舶的预测状态值,实现数字孪生船舶运动状态的更新。
13、作为优选的技术方案,所述的数字孪生船舶的初始状态值采用下式获取:
14、x0=cs0
15、式中,x0为数字孪生船舶的初始状态值,c为量纲转换矩阵,s0为现实中的船舶状态数据,现实中的船舶状态数据包括船舶位置坐标及船舶姿态坐标。
16、作为优选的技术方案,所述的卡尔曼滤波的预测方程为:
17、
18、
19、所述的卡尔曼滤波的更新方程为:
20、
21、
22、
23、
24、其中,表示tk时刻的估量值,表示由tk-1时刻的估量值得到的tk时刻的预测值,f表示状态转移矩阵,h表示量测矩阵,下标k-1和k表示时刻t的变化,字母上的折线符号表示当前字母是估计值,表示tk-1时刻到tk时刻的状态协方差的预测值,qk-1,k-1为tk-1时刻的过程噪声协方差,r为高斯测量白噪声的方差,zk为tk时刻的目标观察值,i为单位矩阵,y表示预测值和测量值之间的差值,k一般被称为卡尔曼增益系数。
25、作为优选的技术方案,所述的可视化信号还包括与所述观察视点所在位置匹配的电子海图。
26、作为优选的技术方案,还包括:
27、判断所述可视化终端是否有多个显示器,若是,将多个显示器扩展并设置多个viewport,通过修改各个viewport的观察投影矩阵,向所述可视化终端发送不同观察视点的可视化信号。
28、作为优选的技术方案,所述的环境模型包括天空模型、水域模型、港口地形建筑模型、航道灯标模型中的至少一个。
29、作为优选的技术方案,所述的船舶状态数据包括船舶识别数据和船舶位置数据,其中,所述船舶识别数据包括船舶识别码、船长、船宽中的至少一个,所述船舶位置数据包括经纬度、航向、速度中的至少一个。
30、作为优选的技术方案,所述的多个数据源包括实时传输数据源和离线备份数据源,其中,所述实时传输数据源所传输的数据包括:ais信息、计程仪信息、gps信息、风向风速信息、测深仪信息中的一个或多个,所述离线备份数据源为船舶的vdr设备和/或接收基站。
31、与现有技术相比,本发明具有以下优点:
32、(1)数字孪生船舶状态更新时能够平稳过渡:从多个数据源获取现实中的船舶信息并进行解析,通过卡尔曼滤波对数字孪生船舶的运动状态进行更新,并动态调整孪生船舶运动状态更新频率,结合观察视点信息,输出最终的可视化信号,本方法通过采用卡尔曼滤波的方式进行状态更新,得到数字孪生船舶的预测状态,通过动态调整状态更新频率,保证在运动状态更新时孪生船舶运动状态的平稳过渡,减少数据的回滚和跳变。
33、(2)成本低廉、维护方便:传统方法使用摄像头等传感器构建远程监控系统时,需要在船舶的多个位置增加摄像头硬件设备,一条船舶的众多摄像头传感器硬件设备需要通过数据传输线路构建网络系统,网络系统需要通过信号发送终端发送到就近的网络节点,多条船舶的网络发送节点需要构建稳定的大型数据传输系统,这些都需要花费大量的时间成本和经济成本,与直接使用摄像头等传感器进行远程监控相比,本方法在船舶端使用既有硬件设备的情况下,利用ais数据获取船舶的实时三维运动状态,缩减了经济成本和时间成本的投入,本技术发明可作为无人驾驶船舶、智能船舶真实远程监控的过渡,本方法利用备份的船舶vdr数据生成的三维船舶运动状态,可作为船舶事后航行分析的依据。
技术特征:
1.一种基于数字孪生的船舶运动可视化方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种基于数字孪生的船舶运动可视化方法,其特征在于,所述的动态调整孪生船舶运动状态更新频率的实现过程包括如下步骤:
3.根据权利要求1所述的一种基于数字孪生的船舶运动可视化方法,其特征在于,所述的通过卡尔曼滤波对数字孪生船舶的运动状态进行更新的过程包括如下步骤:
4.根据权利要求3所述的一种基于数字孪生的船舶运动可视化方法,其特征在于,所述的数字孪生船舶的初始状态值采用下式获取:
5.根据权利要求3所述的一种基于数字孪生的船舶运动可视化方法,其特征在于,所述的卡尔曼滤波的预测方程为:
6.根据权利要求1所述的一种基于数字孪生的船舶运动可视化方法,其特征在于,所述的可视化信号还包括与当前的观察视点所在位置匹配的电子海图。
7.根据权利要求1所述的一种基于数字孪生的船舶运动可视化方法,其特征在于,还包括:
8.根据权利要求1所述的一种基于数字孪生的船舶运动可视化方法,其特征在于,所述的环境模型包括天空模型、水域模型、港口地形建筑模型、航道灯标模型中的至少一个。
9.根据权利要求1所述的一种基于数字孪生的船舶运动可视化方法,其特征在于,所述的船舶状态数据包括船舶识别数据和船舶位置数据,其中,所述船舶识别数据包括船舶识别码、船长、船宽中的至少一个,所述船舶位置数据包括经纬度、航向、速度中的至少一个。
10.根据权利要求1所述的一种基于数字孪生的船舶运动可视化方法,其特征在于,所述的多个数据源包括实时传输数据源和离线备份数据源,其中,所述实时传输数据源所传输的数据包括:ais信息、计程仪信息、gps信息、风向风速信息、测深仪信息中的一个或多个,所述离线备份数据源为船舶的vdr设备和/或接收基站。
技术总结
本发明涉及一种基于数字孪生的船舶运动可视化方法,包括如下步骤:从多个数据源获取现实中的船舶信息,通过解析获取船舶状态数据;基于所述船舶状态数据,加载预设的船舶模型以及与船舶位置相匹配的环境模型;基于当前的船舶状态数据,通过卡尔曼滤波对数字孪生船舶的运动状态进行更新,在更新过程中,动态调整孪生船舶运动状态更新频率;获取观察视点信息,基于船舶模型、环境模型、视点观察选择信息以及数字孪生船舶的运动状态,向可视化终端输出可视化信号。与现有技术相比,本发明在数字孪生船舶状态更新时能够平稳过渡,且成本低廉、维护方便。
技术研发人员:贾东星,关克平,陈锦标
受保护的技术使用者:上海海事大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!