一种基于改进YOLOX算法的无人机检测方法
本发明涉及目标检测,特别是一种基于改进yolox算法的无人机检测方法。
背景技术:
1、近些年,无人机领域的相关技术在及其自动化浪潮下蓬勃发展,不断创新,使得无人机能够胜任越来越多、越来越复杂的任务。如今,在民用领域,无人机在提高人民生活效率上表现出巨大的能力,它能够高效地完成土壤播种、畜牧检测、桥梁隧道检测等任务;在航空测绘领域,无人机可以帮助进行国土资源测绘和城市土地资源测绘,从而实现自然资源调查和土地确权管理;在国防军事领域,无人机在边界巡检、空中侦察、训练靶机等军事任务中表现出成本低、效率高的优势,在空中打击等危险任务中避免了人员伤亡的风险;在物流运输领域,无人机在空中的运行路径近乎直线且几乎无视地形限制,没有传统物流的运输路线局限性,将极大减少地面交通压力。可见无人机在未来可以应用到的场景是十分广泛的。在无人机作业的过程中,对其精确的检测可以辅助其完成更加复杂的任务。
2、现有的yolox检测算法缺乏注意力机制,无法有效的联系上下文信息,检测的过程中对图像的各个部分都有相同的注意力,导致检测效果不足。同时,yolox的特征金字塔依然采用yolov3的特征金字塔,无法较好的融合不同尺度的特征图,导致其在检测小目标的情况下效果不佳。
技术实现思路
1、鉴于此,本发明提供一种基于改进yolox算法的无人机检测方法,以解决上述技术问题。
2、本发明公开了一种基于改进yolox算法的无人机检测方法,其包括以下步骤:
3、将待检测图像输入改进的yolox网络,以确定待检测图像中是否存在无人机;
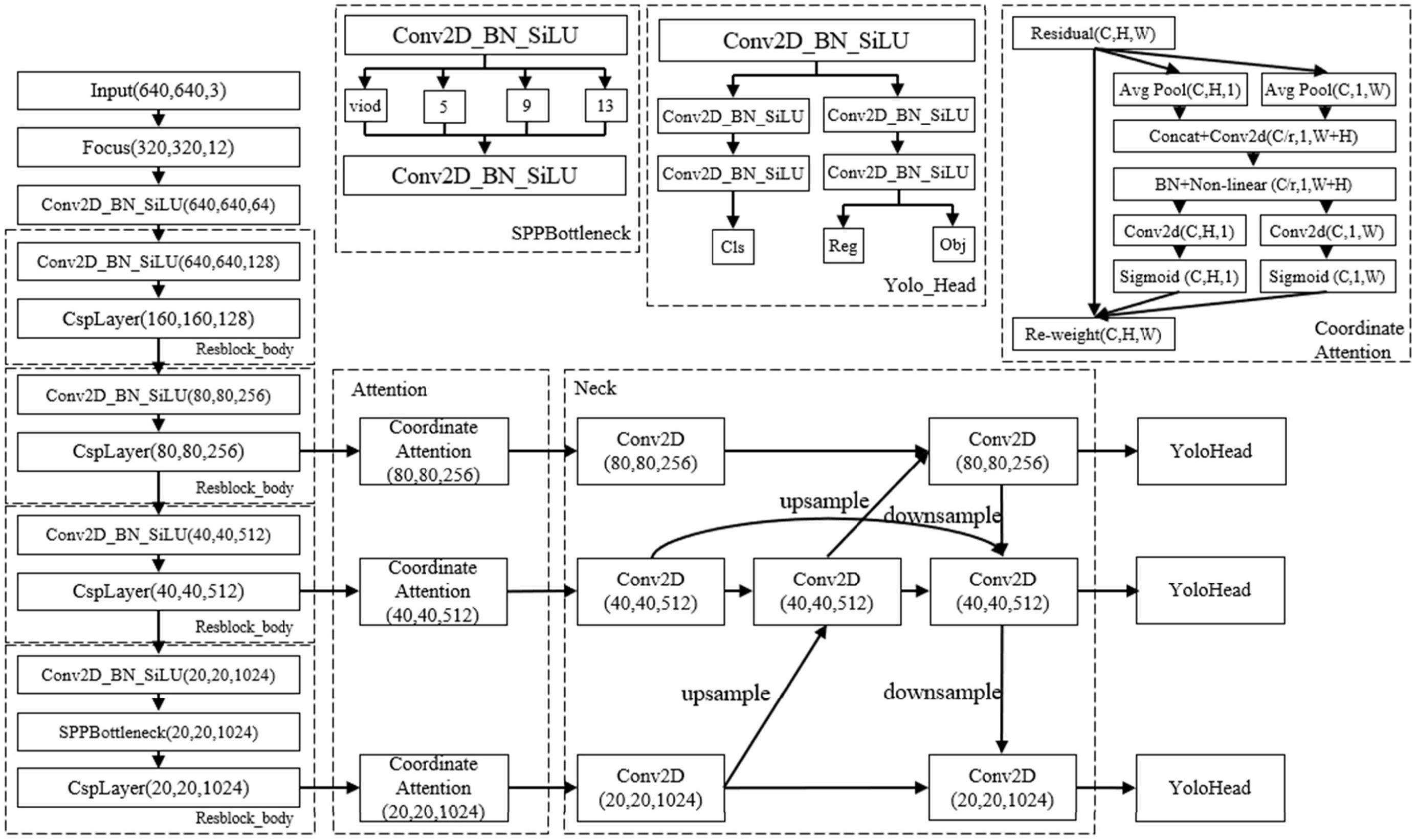
4、改进的yolox网络包括依次连接的backbone、坐标注意力机制模块、具有双向特征金字塔的neck、head;
5、backbone将待检测图像转化为三层不同尺度的特征图,并将三个不同尺度的特征图分别送入坐标注意力机制模块中的三个坐标注意力机制中,坐标注意力机制模块使yolox网络通过自适应的方式挖掘像素之间的依赖关系,输出三个经过坐标注意力机制加权后的特征图;
6、具有双向特征金字塔的neck双向交叉链接加权后的特征图中不同尺度的特征和加权特征融合;
7、head将具有双向特征金字塔的neck处理后的特征图进行目标判别和分类,最终输出检测结果;若待检测图像中存在无人机,则所述检测结果包括无人机的位置、类别以及置信度。
8、进一步地,在任一坐标注意力机制中,首先分别使用尺寸为(h,1)和(1,w)的卷积核沿着水平坐标和垂直坐标对每一个通道进行平均池化,得到高度为h的c通道输出和宽度为w的c通道输出;
9、把高度为h的c通道输出和宽度为w的c通道输出进行卷积和联结操作,得到联合特征图;
10、然后对联合特征图进行切分,生成一对方向感知和位置敏感的特征图;
11、对一对方向感知和位置敏感的特征图进行扩展,作为最终的注意力权重大小,最终加权后的特征图。
12、进一步地,所述高度为h的c通道输出表示为:
13、
14、同理,宽度为w的c通道输出表示为:
15、
16、其中,w和h为输入特征图的宽和高,xc(h,i)为输入特征图在(h,i)位置的值,xc(j,w)为输入特征图在(j,w)位置的值,为一对水平和垂直方向感知的特征图;
17、联合特征图的计算公式如下:
18、
19、其中,f为1x1卷积,cat为联结操作,f为联合特征图;
20、一对方向感知和位置敏感的特征图的计算公式如下:
21、gh=f(fh)
22、gw=f(fw)
23、最后,对gh和gw进行拓展,作为最终的注意力权重大小,最终的输出表达式如下:
24、
25、其中,yc(i,j)为加权后的特征图,xc(i,j)为输入图像数据(i,j)位置的像素,为方向敏感特征图,为位置敏感特征图。
26、进一步地,所述双向特征金字塔在原始yolox特征金字塔网络的基础上,删除只有一条输入边的节点。
27、进一步地,在原始yolox特征金字塔的中间层的输入节点和输出节点之间的添加一条额外的边。
28、进一步地,所述双向特征金字网络在不同尺度的特征间添加横向连接,并引入了加权策略,使得网络在学习的过程中不断调整权重来确定不同尺度特征的重要性,最终输出的特征图结合了当前层与上下两层的特征。
29、进一步地,所述双向特征金字塔的三个输入节点的输入为坐标注意力机制输出的三个不同大小的特征图,分别记为所述双向特征金字塔中与一一对应的输出分别为
30、
31、
32、
33、其中,ω1至ω9分别是双向特征金字塔中每个节点的特征图融合时的权重,conv代表卷积操作,resiz代表上采样或下采样操作。
34、进一步地,若输入节点p4与其位于同一层的输出节点之前增加另外一个节点,该另外一个节点的输出为:
35、
36、其中,为该另外一个节点的输出。
37、由于采用了上述技术方案,本发明具有如下的优点:
38、本发明提高了网络对不同尺寸特征图之间的交互能力,提升网络局部和全局的检测能力。
技术特征:
1.一种基于改进yolox算法的无人机检测方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的方法,其特征在于,在任一坐标注意力机制中,首先分别使用尺寸为(h,1)和(1,w)的卷积核沿着水平坐标和垂直坐标对每一个通道进行平均池化,得到高度为h的c通道输出和宽度为w的c通道输出;
3.根据权利要求2所述的方法,其特征在于,所述高度为h的c通道输出表示为:
4.根据权利要求1所述的方法,其特征在于,所述双向特征金字塔在原始yolox特征金字塔网络的基础上,删除只有一条输入边的节点。
5.根据权利要求1所述的方法,其特征在于,在原始yolox特征金字塔的中间层的输入节点和输出节点之间的添加一条额外的边。
6.根据权利要求1所述的方法,其特征在于,所述双向特征金字网络在不同尺度的特征间添加横向连接,并引入了加权策略,使得网络在学习的过程中不断调整权重来确定不同尺度特征的重要性,最终输出的特征图结合了当前层与上下两层的特征。
7.根据权利要求1所述的方法,其特征在于,所述双向特征金字塔的三个输入节点的输入为坐标注意力机制输出的三个不同大小的特征图,分别记为所述双向特征金字塔中与一一对应的输出分别为
8.根据权利要求7所述的方法,其特征在于,若输入节点p4与其位于同一层的输出节点之前增加另外一个节点,该另外一个节点的输出为:
技术总结
本发明公开了一种基于改进YOLOX算法的无人机检测方法,其特征在于,包括:将待检测图像输入改进的YOLOX网络,以确定待检测图像中是否存在无人机;Backbone将待检测图像转化为三层不同尺度的特征图,并将三个不同尺度的特征图分别送入坐标注意力机制模块中的三个坐标注意力机制中,坐标注意力机制模块使YOLOX网络通过自适应的方式挖掘像素之间的依赖关系,输出三个经过坐标注意力机制加权后的特征图;具有双向特征金字塔的Neck双向交叉链接加权后的特征图中不同尺度的特征和加权特征融合;本发明提高了网络对不同尺寸特征图之间的交互能力,提升网络局部和全局的检测能力。
技术研发人员:宋锐,刘子凡,李娇娇,于鸿博,吴承搏,苏烈超,周智毅
受保护的技术使用者:西安电子科技大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!