基于加速度传感器信号的故障诊断模型训练方法与流程
本申请涉及电机,特别是涉及一种基于加速度传感器信号的故障诊断模型训练方法。
背景技术:
1、在电力系统负荷中,三相异步电机占有较大比重,且由于常处于高负荷运行状态,容易出现故障,其正常工作与否对电力系统具有重要影响,因此,需要对电力系统中的三相异步电机进行故障诊断。
2、现有技术中,通常是先使用测量设备获取三相异步电机的电气量信号或者非电气量信号,再将电气量信号或者非电气量信号输入至预先训练的故障诊断模型,通过故障诊断模型得到三相异步电机的故障诊断结果,其中,故障诊断模型可以基于支持向量机来实现,但是由于支持向量机的参数初始化具有随机性,当参数设置不当时,可能会导致故障诊断模型的收敛性变差,造成故障诊断精度不高,进而无法及时确定出三相异步电机的机械故障。
3、因此,目前三相异步电机的故障诊断技术中存在故障诊断不及时的问题。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够及时确定故障的基于加速度传感器信号的故障诊断模型训练、故障诊断方法、装置、计算机设备、计算机可读存储介质和计算机程序产品。
2、第一方面,本申请提供了一种基于加速度传感器信号的故障诊断模型训练方法。所述方法包括:
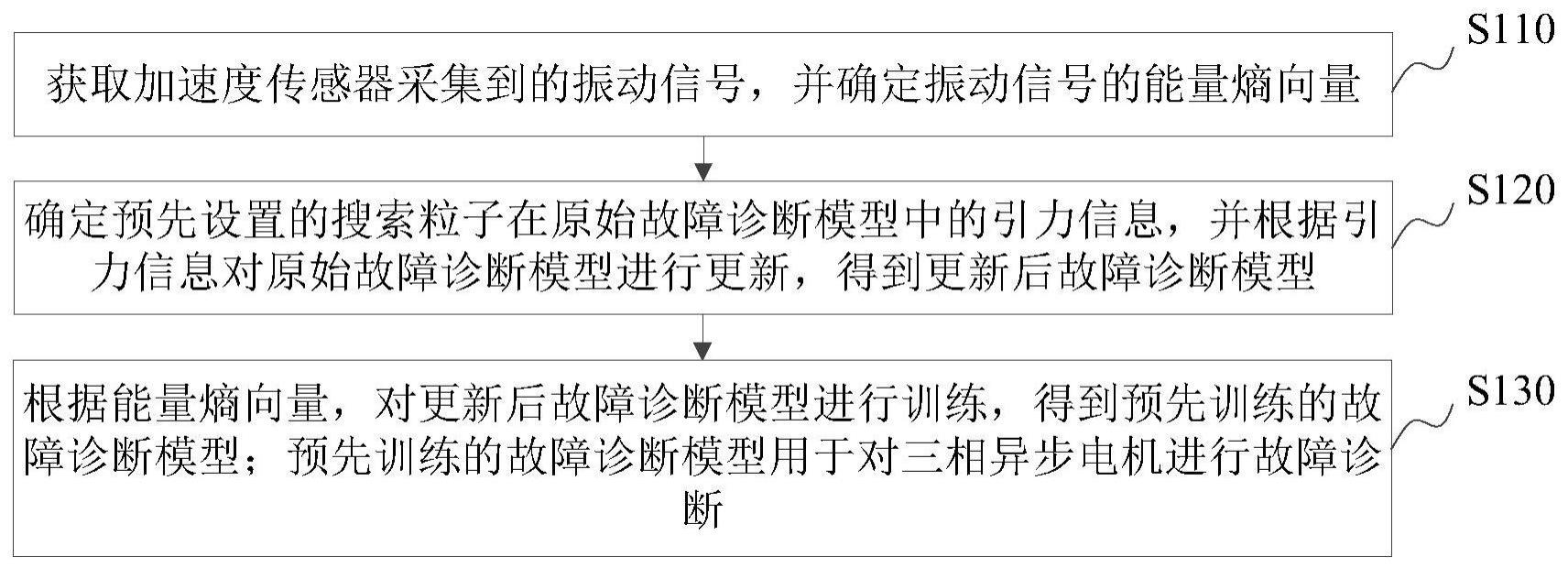
3、获取加速度传感器采集到的振动信号,并确定所述振动信号的能量熵向量;
4、确定预先设置的搜索粒子在原始故障诊断模型中的引力信息,并根据所述引力信息对所述原始故障诊断模型进行更新,得到更新后故障诊断模型;
5、根据所述能量熵向量,对所述更新后故障诊断模型进行训练,得到预先训练的故障诊断模型;所述预先训练的故障诊断模型用于对三相异步电机进行故障诊断。
6、第二方面,本申请提供了一种基于加速度传感器信号的故障诊断方法。所述方法包括:
7、获取加速度传感器针对三相异步电机采集到的待诊断信号,并确定所述待诊断信号的能量熵向量;
8、将所述能量熵向量输入至预先训练的故障诊断模型,得到所述三相异步电机的故障诊断结果;在对所述预先训练的故障诊断模型进行训练时实现以下步骤:
9、获取加速度传感器采集到的振动信号,并确定所述振动信号的能量熵向量;
10、确定预先设置的搜索粒子在原始故障诊断模型中的引力信息,并根据所述引力信息对所述原始故障诊断模型进行更新,得到更新后故障诊断模型;
11、根据所述能量熵向量,对所述更新后故障诊断模型进行训练,得到预先训练的故障诊断模型。
12、第三方面,本申请还提供了一种基于加速度传感器信号的故障诊断模型训练装置。所述装置包括:
13、采集模块,用于获取加速度传感器采集到的振动信号,并确定所述振动信号的能量熵向量;
14、更新模块,用于确定预先设置的搜索粒子在原始故障诊断模型中的引力信息,并根据所述引力信息对所述原始故障诊断模型进行更新,得到更新后故障诊断模型;
15、训练模块,用于根据所述能量熵向量,对所述更新后故障诊断模型进行训练,得到预先训练的故障诊断模型;所述预先训练的故障诊断模型用于对三相异步电机进行故障诊断。
16、第四方面,本申请还提供了一种基于加速度传感器信号的故障诊断装置。
17、所述装置包括:
18、获取模块,用于获取加速度传感器针对三相异步电机采集到的待诊断信号,并确定所述待诊断信号的能量熵向量;
19、诊断模块,用于将所述能量熵向量输入至预先训练的故障诊断模型,得到所述三相异步电机的故障诊断结果;在对所述预先训练的故障诊断模型进行训练时实现以下步骤:
20、获取加速度传感器采集到的振动信号,并确定所述振动信号的能量熵向量;
21、确定预先设置的搜索粒子在原始故障诊断模型中的引力信息,并根据所述引力信息对所述原始故障诊断模型进行更新,得到更新后故障诊断模型;
22、根据所述能量熵向量,对所述更新后故障诊断模型进行训练,得到预先训练的故障诊断模型。
23、第五方面,本申请还提供了一种计算机设备。所述计算机设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
24、获取加速度传感器采集到的振动信号,并确定所述振动信号的能量熵向量;
25、确定预先设置的搜索粒子在原始故障诊断模型中的引力信息,并根据所述引力信息对所述原始故障诊断模型进行更新,得到更新后故障诊断模型;
26、根据所述能量熵向量,对所述更新后故障诊断模型进行训练,得到预先训练的故障诊断模型;所述预先训练的故障诊断模型用于对三相异步电机进行故障诊断。
27、第六方面,本申请还提供了一种计算机可读存储介质。所述计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现以下步骤:
28、获取加速度传感器采集到的振动信号,并确定所述振动信号的能量熵向量;
29、确定预先设置的搜索粒子在原始故障诊断模型中的引力信息,并根据所述引力信息对所述原始故障诊断模型进行更新,得到更新后故障诊断模型;
30、根据所述能量熵向量,对所述更新后故障诊断模型进行训练,得到预先训练的故障诊断模型;所述预先训练的故障诊断模型用于对三相异步电机进行故障诊断。
31、第七方面,本申请还提供了一种计算机程序产品。所述计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现以下步骤:
32、获取加速度传感器采集到的振动信号,并确定所述振动信号的能量熵向量;
33、确定预先设置的搜索粒子在原始故障诊断模型中的引力信息,并根据所述引力信息对所述原始故障诊断模型进行更新,得到更新后故障诊断模型;
34、根据所述能量熵向量,对所述更新后故障诊断模型进行训练,得到预先训练的故障诊断模型;所述预先训练的故障诊断模型用于对三相异步电机进行故障诊断。
35、上述基于加速度传感器信号的故障诊断模型训练、故障诊断方法、装置、计算机设备、存储介质和计算机程序产品,通过获取加速度传感器采集到的振动信号,并确定振动信号的能量熵向量,确定预先设置的搜索粒子在原始故障诊断模型中的引力信息,并根据引力信息对原始故障诊断模型进行更新,得到更新后故障诊断模型,根据能量熵向量,对更新后故障诊断模型进行训练,得到预先训练的故障诊断模型;可以通过使用引力搜索方法优化的支持向量机模型,对三相异步电机进行故障诊断,提高三相异步电机故障诊断的精度,及时发现三相异步电机的机械故障。
技术特征:
1.一种基于加速度传感器信号的故障诊断模型训练方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述确定所述振动信号的能量熵向量,包括:
3.根据权利要求1所述的方法,其特征在于,在根据所述引力信息对原始故障诊断模型进行更新,得到更新后故障诊断模型之前,还包括:
4.根据权利要求3所述的方法,其特征在于,所述根据所述引力信息对原始故障诊断模型进行更新,得到更新后故障诊断模型,包括:
5.根据权利要求4所述的方法,其特征在于,所述初始参数还包括所述搜索粒子的初始速度,所述更新后参数还包括所述搜索粒子的更新后速度;
6.一种基于加速度传感器信号的故障诊断方法,其特征在于,所述方法包括:
7.一种基于加速度传感器信号的故障诊断模型训练装置,其特征在于,所述装置包括:
8.一种基于加速度传感器信号的故障诊断装置,其特征在于,所述装置包括:
9.一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至6中任一项所述的方法的步骤。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至6中任一项所述的方法的步骤。
技术总结
本申请涉及一种基于加速度传感器信号的故障诊断模型训练方法。所述方法包括:获取加速度传感器采集到的振动信号,并确定所述振动信号的能量熵向量;确定预先设置的搜索粒子在原始故障诊断模型中的引力信息,并根据所述引力信息对所述原始故障诊断模型进行更新,得到更新后故障诊断模型;根据所述能量熵向量,对所述更新后故障诊断模型进行训练,得到预先训练的故障诊断模型;所述预先训练的故障诊断模型用于对三相异步电机进行故障诊断。采用本方法能够提高三相异步电机故障诊断的精度,及时发现三相异步电机的机械故障。
技术研发人员:田兵,李鹏,刘仲,骆柏锋,韦杰,吕前程,樊小鹏,王志明,李立浧
受保护的技术使用者:南方电网数字电网研究院有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!