基于S-G滤波和开关中值滤波的维格纳霍夫变换算法
本发明属于雷达对抗中雷达侦察信号处理领域,尤其是涉及一种基于s-g滤波和开关中值滤波的维格纳霍夫变换(wigner hough transform,wht)算法。
背景技术:
1、雷达侦察、干扰以及电子防御是雷达对抗的主要内容。雷达侦察旨在利用雷达侦察设备,对非合作方发射的雷达信号进行截获、调制识别、参数测量、定位分析、分选识别等处理,从而得到雷达相关技术参数、位置部署、体制类型等关键信息。有效和准确的参数估计是雷达侦察信号处理的关键,对雷达干扰、雷达电子防御甚至作战策略都起着至关重要的作用。然而随着电磁环境的日益复杂,导致截获的信号信噪比低,严重影响后续参数估计的精度,因此研究在低信噪比条件下仍能对信号进行有效参数估计的算法十分有必要。线性调频信号(linear frequency modulation,lfm)作为一种典型的非平稳信号,广泛应用于通信、雷达、声纳和地震勘探等领域,对lfm信号的参数估计一直是学者们研究的热点内容,也是本发明适用的对象。
2、现有针对lfm信号的参数估计算法有很多,基于维格纳霍夫变换(wht)的算法是其中一类重要的参数估计算法。传统的wht结合了双线性时频分布中的维格纳威尔分布(wigner-ville distribution,wvd)以及图像特征提取方法中的hough变换,wvd对于lfm信号,有很好的能量聚集性,而霍夫变换可将参数估计问题转换为参数空间搜索局部极大值及其对应坐标的问题。传统的wht算法是一种经典的信号参数估计算法,该算法对于lfm信号的参数有着良好的估计精度,并且算法的鲁棒性较强。但该算法在低信噪比的情况下易受到噪声的干扰而使得性能急剧下降。
技术实现思路
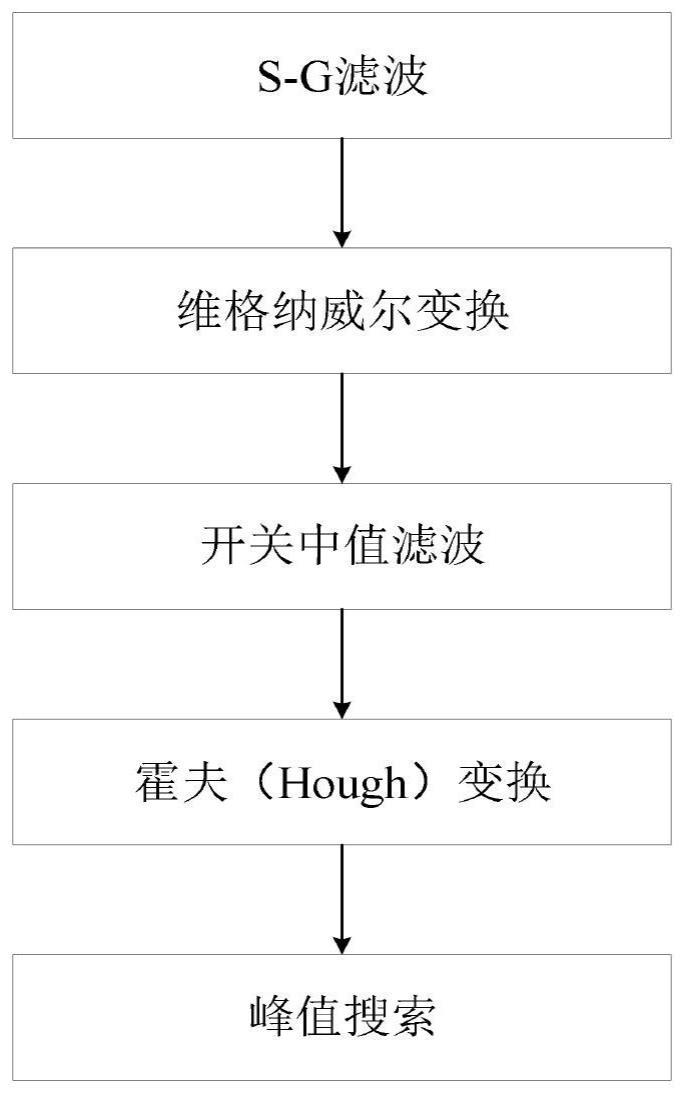
1、为了解决上述技术问题,本发明提出了一种基于s-g滤波和开关中值滤波的维格纳霍夫变换算法,首先对含有高斯白噪声的lfm信号进行savitzky-golay滤波(s-g滤波),滤波后再对信号进行维格纳威尔变换,得到信号的维格纳威尔分布(wigner-villedistribution,wvd)时频图,再对该分布采用开关中值滤波进行二次滤波,接着进行霍夫变换后,搜索峰值点坐标,代入特定的公式即可求得两个参数的估计值,进一步提升算法的抗噪性。
2、为了实现上述目的,本发明采用的技术方案为:
3、一种基于s-g滤波和开关中值滤波的维格纳霍夫变换算法,包括以下步骤:
4、步骤1,对含有噪声的低信噪比lfm信号进行s-g滤波;
5、步骤2,对s-g滤波后的低信噪比lfm信号做维格纳威尔变换,得到信号的维格纳威尔时频分布图;
6、步骤3,对信号的维格纳威尔时频分布图作开关中值滤波,得到滤波后的时频分布图;
7、步骤4,对开关中值滤波后的时频分布图进行霍夫变换;
8、步骤5,对霍夫变换后信号能量形成的峰值进行峰值搜索,并利用峰值点坐标计算参数的估计值。
9、进一步地,所述步骤1包含如下步骤:
10、步骤1.1,设置拟合多项式y=a0+a1x+a2x2+...+al-1xl-1的拟合阶次;其中,x为滤波窗口内某一测量点待拟合的数据,y为该测量点拟合后的输出数据,ap(p=0,1,...,l-1)为待求解的加权系数;
11、步骤1.2,进行窗口宽度的选择;
12、步骤1.3,应用最小二乘法确定加权系数;
13、步骤1.4,依次向右移动窗口并重复步骤1.3,直到遍历完整个信号。
14、进一步地,所述步骤3包含如下步骤:
15、步骤3.1,搜索步骤2得到的维格纳威尔时频分布图中能量的最大幅值并将判定该图像点幅值是否对应噪声能量大小的阈值设置为其中,为维格纳威尔分布,t为时间自变量,f为频率;
16、步骤3.2,对得到的维格纳威尔时频分布图中每个图像点,将以该图像点为中心点的3×3窗口内的所有图像点幅值按从小到大的顺序进行排序;
17、步骤3.3,将窗口中心图像点幅值的绝对值与阈值进行比较,若该图像点的幅值的绝对值小于等于设定的阈值,则判定该图像点的幅值对应着噪声产生的能量大小,取排序后图像点幅值的中值作为当前图像点的幅值。反之,则该图像点的幅值保持不变;
18、步骤3.4,将窗口按照从维格纳威尔时频分布图顶部滑动到底部,左边移向右边的顺序滑动,重复步骤3.3直到遍历整个维格纳威尔时频分布图。
19、进一步地,所述步骤4包括如下步骤:
20、令经过开关中值滤波后的信号的维格纳威尔分布为则信号的维格纳霍夫变换为:
21、
22、其中,f0是lfm信号的起始频率,k是调频斜率;s1(t)表示经过s-g滤波后的加噪信号,τ表示时延,*表示取共轭,j表示虚数;
23、在极坐标的形式下,信号的维格纳霍夫变换为:
24、
25、其中,ρ为过原点垂线的长度,θ为ρ与x轴的夹角。
26、进一步地,所述步骤5包含如下步骤:
27、步骤5.1,对步骤4得到的维格纳霍夫变换的结果进行峰值搜索,得到峰值点对应的坐标;
28、步骤5.2,将峰值点对应的坐标进行参数估计;对一个给定的lfm信号,采样率为fs,设采样点数为n3,维格纳威尔分布的时频图上时间分辨单元为δt,频率分辨单元为δf,霍夫变换的图像的长宽均为n3,经过维格纳霍夫变换后的峰值点的坐标为(ρ,θ),则有如下关系:
29、
30、
31、lfm信号的起始频率f0和调频斜率k的估计公式如下:
32、
33、
34、有益效果:
35、本发明适用于低信噪比条件下线性调频信号的参数估计,主要是对线性调频信号的起始频率和调频斜率两个参数进行估计。本发明实现了在不降低估计精度的同时提升了算法的抗噪性。本发明算法的主要贡献在于:对比传统的wht算法,在不降低估计精度的情况下,对调频斜率和起始频率估计的抗噪性均提升了2db。
技术特征:
1.一种基于s-g滤波和开关中值滤波的维格纳霍夫变换算法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于s-g滤波和开关中值滤波的维格纳霍夫变换算法,其特征在于,所述步骤1包含如下步骤:
3.根据权利要求2所述的一种基于s-g滤波和开关中值滤波的维格纳霍夫变换算法,其特征在于,所述步骤3包含如下步骤:
4.根据权利要求3所述的一种基于s-g滤波和开关中值滤波的维格纳霍夫变换算法,其特征在于,所述步骤4包括如下步骤:
5.根据权利要求4所述的一种基于s-g滤波和开关中值滤波的维格纳霍夫变换算法,其特征在于,所述步骤5包含如下步骤:
技术总结
本发明提出一种基于S‑G滤波和开关中值滤波的维格纳霍夫变换算法,适用于低信噪比条件下线性调频信号的参数估计,对线性调频信号的起始频率和调频斜率两个参数进行估计,首先对含有高斯白噪声的LFM信号进行Savitzky‑Golay滤波(S‑G滤波),滤波后再对信号进行维格纳威尔变换,得到信号的维格纳威尔时频分布,再对该分布采用开关中值滤波进行二次滤波,接着进行霍夫变换后,搜索峰值点坐标,代入特定的公式即可求得两个参数的估计值,本发明实现了在不降低估计精度的同时提升了算法的抗噪性。本发明算法的主要贡献在于:对比传统的WHT算法,在不降低估计精度的情况下,对调频斜率和起始频率估计的抗噪性均提升了2dB。
技术研发人员:张群英,王海英,卢伟,成文海,董家铭,刘小军,方广有
受保护的技术使用者:中国科学院空天信息创新研究院
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!