基于图像处理的挂车角度识别方法与流程
本发明涉及图像数据处理,具体涉及一种基于图像处理的挂车角度识别方法。
背景技术:
1、大型挂车在行驶过程中不可避免地会遇到转弯路口,由于挂车车身太长,转弯半径很大,司机往往无法自己观察此时车身的情况,很难准确预判车头与车身的实际角度,进而无法进行下一步的判断,导致挂车在转弯时容易发生意外事故。目前,在车头两侧安置相机,在车身上等距安置led灯,采集车身图片后,经过图像分析其中led灯的位置分布,来获得此时挂车车身的具体位置,并根据畸变系数来计算获得此时挂车角度。但是在环境亮度较暗的场景下,采集的图像中会不可避免地出现光晕现象,导致led灯的边缘轮廓减弱,无法识别得到精确的led灯的位置,因此需要通过图像增强来增强边缘轮廓。为了能够识别出挂车车头和车身的角度,现有技术中通常采用反锐化掩模算法对图像进行增强,而常规的反锐化掩模算法在高频信息与原图像叠加时,整体的叠加系数都相同,但是led灯在环境亮度较低时,采集的图像中,led灯会产生一片光晕区域,光晕区域会使图像中的如车身,以及led灯的边缘轮廓特征减弱,如果增加叠加系数,由于整体的叠加系数相同,同样也会增加光晕的轮廓,并不能达到增加led灯以及车身的边缘轮廓,从而很少识别车身信息,进而通过车身畸变程度很难得到此时挂车的车身角度。
技术实现思路
1、为了解决现有技术中采用常规的反锐化掩模算法在高频信息与原图像叠加时,不能达到增加led灯以及车身的边缘轮廓,从而很少识别车身信息,进而通过车身畸变程度很难得到此时挂车的车身角度的问题,本发明提供一种基于图像处理的挂车角度识别方法,该方法通过对图像中的光亮区域中表现出来的高频信息的特征,结合光晕现象以及车身轮廓特征,以及led灯的分布特征等实际信息,对不同高频信息在与原图像叠加时给予不同的叠加系数,从而达到增强车身轮廓,避免了同时增强光晕效应,使识别车身轮廓更加精确,最终达到精确识别挂车角度的目的。
2、本发明的目的是提供一种基于图像处理的挂车角度识别方法,包括以下步骤:
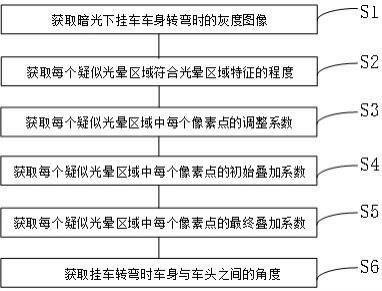
3、获取暗光下挂车车身转弯时的灰度图像;其中,挂车车身下方间隔设置有多个发光体;
4、根据灰度图像以及灰度图像的二值图像提取灰度图像中的多个光亮区域;
5、获取每个光亮区域对应的疑似光晕区域;根据每个疑似光晕区域从内至外相邻层像素点灰度值的差异获取每个疑似光晕区域符合光晕区域特征的程度;
6、根据每个疑似光晕区域中每个像素点与其邻域像素点的灰度差异,以及所述像素点在所述疑似光晕区域中所处的位置,获取每个疑似光晕区域中每个像素点的调整系数;
7、根据每个疑似光晕区域符合光晕区域特征的程度,每个疑似光晕区域中每个像素点的位置及调整系数,获取每个疑似光晕区域中每个像素点的初始叠加系数;
8、根据每个疑似光晕区域中每个像素点的初始叠加系数,以及每个疑似光晕区域的中心位置与基准点的距离,获取每个疑似光晕区域中每个像素点的最终叠加系数;其中,将灰度图像中的左下角或右下角为基准点;
9、根据每个疑似光晕区域中每个像素点的最终叠加系数对灰度图像中的光亮区域进行反锐化掩模增强,获取增强后的图像;
10、根据增强后的图像通过识别车身轮廓获取挂车转弯时车身与车头之间的角度。
11、在一实施例中,所述每个疑似光晕区域从内至外相邻层是以每个疑似光晕区域中灰度值最高的像素点为中心位置,将围绕中心位置的一圈像素点为一层像素点,将从中心位置至疑似光晕区域的边缘的相邻两圈的像素点为每个疑似光晕区域从内至外相邻层。
12、在一实施例中,所述每个疑似光晕区域中每个像素点与其邻域像素点的灰度差异是每个疑似光晕区域中每个像素点沿周向的相邻像素点之间的灰度差异。
13、在一实施例中,所述像素点在所述疑似光晕区域中所处的位置是所述像素点距所述疑似光晕区域的中心位置之间的距离。
14、在一实施例中,所述基准点是按照以下步骤获取:当挂车向左转弯时,将采集的灰度图像中的左下角为基准点;当挂车向右转弯时,将采集的灰度图像中的右下角为基准点。
15、在一实施例中,所述每个光亮区域对应的疑似光晕区域是按照以下步骤获取:
16、将每个光亮区域中灰度值最大的像素点为中心像素点;
17、若中心像素点邻域内的像素点符合灰度值小于或等于中心像素点的灰度值,则中心像素点邻域内的像素点符合光晕区域的特征;
18、将符合光晕区域的特征的像素点为中心,判断其邻域内除判定过的像素点之外的像素点是否满足灰度值小于或等于中心像素点的灰度值,将之外的像素点满足灰度值小于或等于中心像素点的灰度值,则其邻域内除判定过的像素点之外的像素点符合光晕区域的特征;将符合光晕区域的特征的所有像素点形成的区域作为每个光亮区域对应的疑似光晕区域。
19、在一实施例中,所述暗光下挂车车身转弯时的灰度图像是按照以下步骤获取:在挂车车头两侧安装图像采集装置;当挂车向左转弯时,利用挂车车头左侧的图像采集装置获取车身转弯时的灰度图像;当挂车向右转弯时,利用挂车车头右侧的图像采集装置获取车身转弯时的灰度图像。
20、在一实施例中,所述挂车转弯时车身与车头之间的角度是按照以下步骤获取:
21、根据增强后的图像通过识别车身轮廓,将车身的多个边缘轮廓的端点投射到该车对应的坐标系中,通过预设的去畸变函数将增加后的图像中的车辆畸变去除,并根据反三角函数计算出车身与车头的角度。
22、本发明的有益效果是:本发明提供的一种基于图像处理的挂车角度识别方法,该方法通过对每个光亮区域对应的疑似光晕区域进行分析,根据每个疑似光晕区域从内至外相邻层像素点灰度值的差异获取每个疑似光晕区域符合光晕区域特征的程度;通过每个疑似光晕区域符合光晕区域特征的程度初步判断疑似光晕区域是否符合光晕区域的特征;其次通过计算每个疑似光晕区域中每个像素点的调整系数;以及计算每个疑似光晕区域中每个像素点的初始叠加系数;有效地避免了将光晕区域与车身反光区域的混淆,同时增加了对光晕区域中可能出现的车身轮廓的敏感程度,可以有效地对光晕区域中的轮廓进行程度较大的增强的同时,还能避免对光晕本身具有的纹理的增强。随后基于每个像素点的初始叠加系数计算最终的叠加系数,主要是根据其光晕区域内部灰度值的变化趋势,与反光区域进行差异区分后,最终得到自适应叠加系数。最后根据每个像素点的最终叠加系数对灰度图像中的光亮区域进行反锐化掩模增强,获取增强后的图像;根据增强后的图像通过识别车身轮廓获取挂车转弯时车身与车头之间的角度。
技术特征:
1.一种基于图像处理的挂车角度识别方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于图像处理的挂车角度识别方法,其特征在于,所述每个疑似光晕区域从内至外相邻层是以每个疑似光晕区域中灰度值最高的像素点为中心位置,将围绕中心位置的一圈像素点为一层像素点,将从中心位置至疑似光晕区域的边缘的相邻两圈的像素点为每个疑似光晕区域从内至外相邻层。
3.根据权利要求1所述的基于图像处理的挂车角度识别方法,其特征在于,所述每个疑似光晕区域中每个像素点与其邻域像素点的灰度差异是每个疑似光晕区域中每个像素点沿周向的相邻像素点之间的灰度差异。
4.根据权利要求1所述的基于图像处理的挂车角度识别方法,其特征在于,所述像素点在所述疑似光晕区域中所处的位置是所述像素点距所述疑似光晕区域的中心位置之间的距离。
5.根据权利要求1所述的基于图像处理的挂车角度识别方法,其特征在于,所述基准点是按照以下步骤获取:当挂车向左转弯时,将采集的灰度图像中的左下角为基准点;当挂车向右转弯时,将采集的灰度图像中的右下角为基准点。
6.根据权利要求1所述的基于图像处理的挂车角度识别方法,其特征在于,所述每个光亮区域对应的疑似光晕区域是按照以下步骤获取:
7.根据权利要求1所述的基于图像处理的挂车角度识别方法,其特征在于,所述暗光下挂车车身转弯时的灰度图像是按照以下步骤获取:在挂车车头两侧安装图像采集装置;当挂车向左转弯时,利用挂车车头左侧的图像采集装置获取车身转弯时的灰度图像;当挂车向右转弯时,利用挂车车头右侧的图像采集装置获取车身转弯时的灰度图像。
技术总结
本发明公开了一种基于图像处理的挂车角度识别方法,属于图像数据处理技术领域;包括以下步骤:获取暗光下挂车车身转弯时的灰度图像;获取每个疑似光晕区域符合光晕区域特征的程度;获取每个疑似光晕区域中每个像素点的最终叠加系数;根据每个疑似光晕区域中每个像素点的最终叠加系数对所述二值图像通过掩模处理并与灰度图像叠加后的图像进行反锐化掩模增强,获取增强后的图像;根据增强后的图像通过识别车身轮廓获取挂车转弯时车身与车头之间的角度。本发明通过对不同高频信息在与原图像叠加时给予不同的叠加系数,从而达到增强车身轮廓,避免了同时增强光晕效应,使识别车身轮廓更加精确,最终达到精确识别挂车角度的目的。
技术研发人员:杨丽,杨以萌
受保护的技术使用者:山东杨嘉汽车制造有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!