一种基于不同尺度的多源点云数据配准方法及系统与流程
本发明涉及摄影测量,尤其涉及一种基于不同尺度的多源点云数据配准方法及一种基于不同尺度的多源点云数据配准系统。
背景技术:
1、三维激光扫描仪可以快速、无接触的获取目标物体的激光点云数据,该点云可以反映目标物体的高精度点位坐标信息,为获取复杂以及危险目标物体的空间数据提供了有效的手段,但是获取的点云数据缺少物体表面的颜色纹理信息。而获取的具有重叠区域的影像数据可以提供物体的纹理信息,将影像数据通过摄影测量方式生成点云数据,由于相机镜头存在畸变,导致获取的影像三维模型精度低于三维激光点云模型精度,所以将两者进行融合,可以很好的弥补单一数据源存在的不足,现存的方法但是直接从影像中提取特征会导致提取的特征精度较低,从而影响后续激光点云与影像的配准精度。
技术实现思路
1、本发明的目的是提供一种基于不同尺度的多源点云数据配准方法及系统,能够提高激光点云与影像点云配准的精度。
2、作为本发明的第一个方面,提供一种基于不同尺度的多源点云数据配准方法,所述基于不同尺度的多源点云数据配准方法包括:
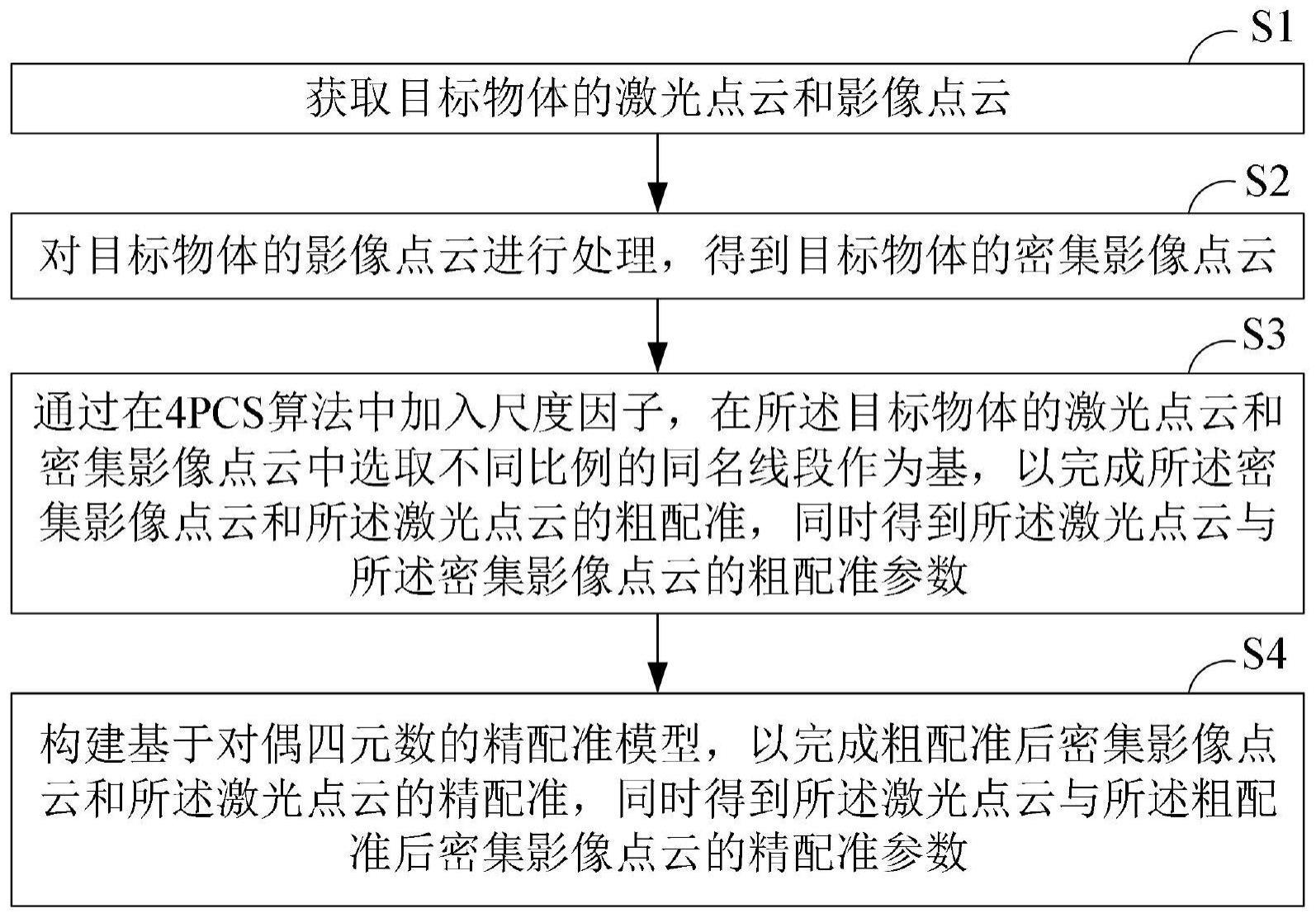
3、步骤s1:获取目标物体的激光点云和影像点云;
4、步骤s2:对所述目标物体的影像点云进行处理,得到目标物体的密集影像点云;
5、步骤s3:通过在4pcs算法中加入尺度因子,在所述目标物体的激光点云和密集影像点云中选取不同比例的同名线段作为基,以完成所述密集影像点云和所述激光点云的粗配准,同时得到所述激光点云与所述密集影像点云的粗配准参数;
6、步骤s4:构建基于对偶四元数的精配准模型,以完成粗配准后密集影像点云和所述激光点云的精配准,同时得到所述激光点云与所述粗配准后密集影像点云的精配准参数。
7、进一步地,所述对所述目标物体的影像点云进行处理,得到目标物体的密集影像点云,还包括:
8、对所述目标物体的具有重叠区域的影像点云进行光束法平差,生成稀疏影像点云;
9、利用多视密集匹配算法对所述稀疏影像点云进行加密,得到所述密集影像点云。
10、进一步地,所述通过在4pcs算法中加入尺度因子,在所述目标物体的激光点云和密集影像点云中选取不同比例的同名线段作为基,以完成所述密集影像点云和所述激光点云的粗配准,同时得到所述激光点云与所述密集影像点云的粗配准参数,还包括:
11、根据在4pcs算法中加入尺度因子,以构建密集影像点云和激光点云的粗配准模型,如下式(1)所示:
12、oi=λ1rqi+t (1)
13、式(1)中,oi为激光点云坐标系下激光点云i的位置,qi为密集影像点云坐标系下密集影像点云i的位置,r为粗配准旋转矩阵,t为粗配准平移矩阵,λ1为粗配准尺度缩放因子;
14、根据粗配准模型,通过在所述目标物体的激光点云和密集影像点云中选取不同比例的同名线段作为基,进而求粗配准参数,所述粗配准参数包括粗配准旋转矩阵r、粗配准平移矩阵t和粗配准尺度缩放因子λ1。
15、进一步地,所述构建基于对偶四元数的精配准模型,以完成粗配准后密集影像点云和所述激光点云的精配准,同时得到所述激光点云与所述粗配准后密集影像点云的精配准参数,还包括:
16、对偶四元数作为空间坐标转换的描述符,获得对偶四元数描述下的密集影像点云和激光点云的精配准模型,如下式(2)所示:
17、oi=λ2r(k)oi'+t(k) (2)
18、式(2)中,oi为激光点云坐标系下激光点云i的位置,即激光点云坐标系下密集影像点云i精配准后的位置;oi'为激光点云坐标系下密集影像点云i粗配准后的位置;r(k)为精配准旋转矩阵;t(k)为精配准平移矩阵;λ2为精配准尺度缩放因子;
19、根据对偶四元数计算出精配准参数,所述精配准参数包括精配准旋转矩阵r(k)、精配准平移矩阵t(k)和精配准尺度缩放因子λ2。
20、进一步地,还包括:
21、将式(2)中的方程进行线性化可得误差方程如式(3)所示:
22、
23、式(3)中,a1i、a2i、a3i(i=1,2,3······9)为系数矩阵;dk0,dk1,dk2,dk3,dr0,dr1,dr2,dr3,dλ分别为k0、k1、k2、k3、r0、r1、r2、r3、λ2的改正数;li(i=1,2,3)为常数矩阵;
24、将式(3)误差方程用矩阵的形式表达如下式(4):
25、v=ax+l (4)
26、由于对偶四元数的实部k和虚部r并不是相互独立的,存在数学约束关系:对约束条件方程进行线性化,获取误差方程的矩阵形式为式(5):
27、bx+w=0 (5)
28、式(5)中,
29、因此,基于点特征约束的点云的配准方程式为式(6):
30、
31、从激光点云和密集影像点云中至少提取3对同名特征点,代入到式(6)中,计算出k0、k1、k2、k3、r0、r1、r2、r3和λ2;
32、所述精配准旋转矩阵r(k)的计算公式为:
33、
34、所述精配准平移矩阵t(k)的计算公式为:
35、
36、其中,a1,a2,a3,b1,b2,b3,c1,c2,c3为旋转角;(δx,δy,δz)为平移向量,k0为k的实部;k1、k2、k3为k的虚部;r0为r的实部,r1、r2、r3为r的虚部。
37、作为本发明的第二个方面,提供一种基于不同尺度的多源点云数据配准系统,用于实现前文所述的基于不同尺度的多源点云数据配准方法,所述基于不同尺度的多源点云数据配准系统包括:
38、获取模块,用于获取目标物体的激光点云和影像点云;
39、处理模块,用于对所述目标物体的影像点云进行处理,得到目标物体的密集影像点云;
40、粗配准模块,用于通过在4pcs算法中加入尺度因子,在所述目标物体的激光点云和密集影像点云中选取不同比例的同名线段作为基,以完成所述密集影像点云和所述激光点云的粗配准,同时得到所述激光点云与所述密集影像点云的粗配准参数;
41、精配准模块,用于构建基于对偶四元数的精配准模型,以完成粗配准后密集影像点云和所述激光点云的精配准,同时得到所述激光点云与所述粗配准后密集影像点云的精配准参数。
42、本发明提供的基于不同尺度的多源点云数据配准方法具有以下优点:解决了不同尺度点云配准精度低的问题,同时也提高了配准效率。
技术特征:
1.一种基于不同尺度的多源点云数据配准方法,其特征在于,所述基于不同尺度的多源点云数据配准方法包括:
2.根据权利要求1所述的基于不同尺度的多源点云数据配准方法,其特征在于,所述对所述目标物体的影像点云进行处理,得到目标物体的密集影像点云,还包括:
3.根据权利要求1所述的基于不同尺度的多源点云数据配准方法,其特征在于,所述通过在4pcs算法中加入尺度因子,在所述目标物体的激光点云和密集影像点云中选取不同比例的同名线段作为基,以完成所述密集影像点云和所述激光点云的粗配准,同时得到所述激光点云与所述密集影像点云的粗配准参数,还包括:
4.根据权利要求1所述的基于不同尺度的多源点云数据配准方法,其特征在于,所述构建基于对偶四元数的精配准模型,以完成粗配准后密集影像点云和所述激光点云的精配准,同时得到所述激光点云与所述粗配准后密集影像点云的精配准参数,还包括:
5.根据权利要求4所述的基于不同尺度的多源点云数据配准方法,其特征在于,还包括:
6.一种基于不同尺度的多源点云数据配准系统,用于实现权利要求1-5中任意一项所述的基于不同尺度的多源点云数据配准方法,其特征在于,所述基于不同尺度的多源点云数据配准系统包括:
技术总结
本发明涉及摄影测量技术领域,具体公开了一种基于不同尺度的多源点云数据配准方法,包括:获取目标物体的激光点云和影像点云;对目标物体的影像点云进行处理,得到目标物体的密集影像点云;依据加入尺度因子的4PCS算法将密集影像点云粗配准到激光点云的坐标系下,以完成密集影像点云和激光点云的粗配准,同时得到粗配准参数;依据对偶四元数空间描述符将粗配准后密集影像点云精配准到激光点云的坐标系下,以完成粗配准后密集影像点云和激光点云的精配准,同时得到精配准参数。本发明还公开了一种基于不同尺度的多源点云数据配准系统。本发明可以应用到激光点云与影像数据配准上,解决了不同尺度点云配准精度低的问题,同时也提高了配准效率。
技术研发人员:苏本娅,王佳卿,储友兵,张明敢,王子彧,王海潮,周正,周君,鲁行者,王薪普,佘鑫
受保护的技术使用者:华昕设计集团有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!