基于半固态LiDAR的小型通用激光扫描仪及构建方法
本发明属于三维建模,特别涉及基于半固态lidar的小型通用激光扫描仪及构建方法。
背景技术:
1、三维激光扫描仪是一种利用激光测距的原理,通过高速测量记录被测物体表面大量的密集的点的三维坐标、反射率和纹理等信息,可快速复建出被测目标的三维模型及线、面、体等各种图件数据的设备。它可以应用于多个领域,如测绘工程、自然灾害调查、城市规划、航空航天、汽车和运输、消费品、制造、重工业、医疗器械、石油和天然气、发电等。激光雷达(lidar)是一种有源传感器,通过自身发射激光束扫描目标物体通过接收反射光实现对目标的测量。
2、目前常用的三维建模扫描仪主要有以下几款:1.faro法如,适合中短距离扫描;2.leica徕卡:适合长距离扫描。3.trimble天宝:适合多种场景和应用。4.z+f:适合工业测量和建筑测绘。5.topcon拓普康:适合土木工程和地理信息系统。但它们大多数都含有高速旋转的外部部件,安全性能不高,且体积较大,只适用于专业场合,由专业人员操作,普通人接触的机会较少。
3、uniscan是一款基于半固态lidar的小型通用激光扫描仪,它通过重新组织三维激光扫描仪的硬件和软件,基本实现三维扫描要求的同时,可以极大程度上降低三维激光扫描仪的成本,让三维激光建模更加亲民,更加普遍化。
技术实现思路
1、针对背景技术存在的问题,本发明提供一种基于半固态lidar的小型通用激光扫描仪以及构建方法。
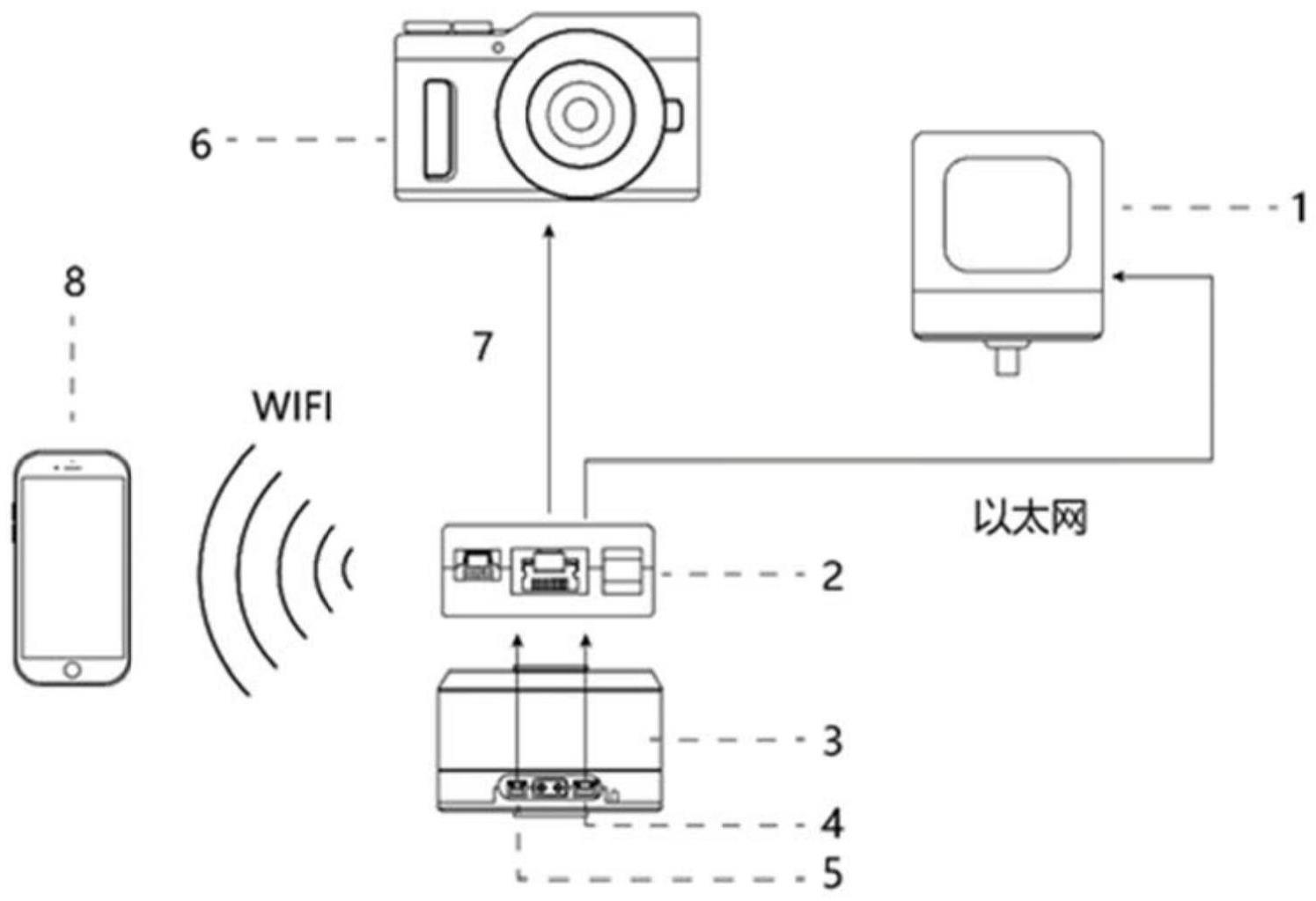
2、为解决上述技术问题,本发明采用如下技术方案:基于半固态lidar的小型通用激光扫描仪,包括电池、转接头、livox-mid 40扫描头、树莓派、转台、相机和移动端;转台在最下部,转台上方设置滑环,滑环之上设置livox-mid 40扫描头,livox-mid 40扫描头之上设置电池,电池之上设置树莓派,树莓派之上设置转接头;手机wifi连接树莓派,转台通过can总线与树莓派相连,livox-mid 40扫描头通过以太网与树莓派相连,相机通过usb线与树莓派相连;电池为livox-mid 40扫描头供电。
3、在上述基于半固态lidar的小型通用激光扫描仪的构建方法中,通过激光扫描仪得到环境三维彩色模型包括:
4、使用手机连接树莓派控制转台的旋转,固连激光雷达转台,使得激光雷达获得360°的激光点云数据;通过树莓派控制相机,在激光扫描仪旋转的同时拍摄照片;将激光点云数据、转台旋转信息与照片信息传输至树莓派;将激光点云数据与转台旋转信息结合,进行激光点云的坐标纠正,建立三维点云模型,将三维点云模型与照片进行匹配,生成有色三维模型;将有色三维模型通过wifi传输至手机端显示。
5、在上述基于半固态lidar的小型通用激光扫描仪的构建方法中,所述激光点云的坐标纠正,建立三维点云模型包括:
6、将lidar扫描得到的激光点云的坐标系定义如下:从相机的视角看,x轴朝向相机右方,y轴朝向相机下方,z轴朝向相机前方,与相机坐标系相同;
7、步骤1、量测转台坐标系和激光点云坐标系在x轴坐标系上的差异;
8、杆臂量测:转台、lidar描述仪保持水平,其转台坐标系和点云坐标系仅在x轴方向存在差异,经量测后得到杆臂距离为l,单位m;
9、步骤2、利用转台旋转信息与激光点云数据的时间戳进行时间同步;
10、由于每个历元lidar描述仪记录的点云坐标均有时间戳,通过时间戳判断转台转动的角度,公式如下:
11、θ(i)=ω(ti-t1) (1)
12、t1表示第一个历元的时间戳,ti表示第i个历元的时间戳,ω表示转台转动角速率;
13、步骤3、通过旋转矩阵对激光点云数据进行坐标转换,建立三维点云模型;
14、坐标转换:将纠正的第i个历元的坐标记为b(i),纠正过后的坐标记为a(i),则转化步骤如下:
15、
16、其中表示第i个历元的旋转矩阵,表达式如下:
17、
18、经过步骤1、步骤2、步骤3后,所有点云坐标均得到了纠正。
19、在上述基于半固态lidar的小型通用激光扫描仪的构建方法中,所述三维点云模型与照片进行匹配,生成有色三维模型包括:将扫描仪坐标系转成像素坐标系,从而提取对应点的灰度值,对点云进行赋色,生成有色三维模型;具体步骤如下:
20、定义:
21、ow-xwywzw为扫描仪坐标系,以扫描仪中心为原点,单位为m;
22、oc-xcyczc为相机坐标系,以光心为原点,单位为m;
23、o-xy为图像坐标系,光心为图像中心,单位为mm;
24、uv为像素坐标系,原点为图像左上角,单位为pixel;
25、1)在进行设备组装时,事先测量相机与扫描仪之间安装角和平移量,按式(4)实现扫描仪坐标系与相机坐标系之间的转换;
26、
27、其中,r是通过安装角获得的旋转矩阵,t为平移矩阵;
28、2)相机坐标系与像素坐标系之间的转化;
29、对于点云匹配有如下模型:
30、
31、其中,点xc在相机坐标系中的坐标记为(xc,yc,zc)t,其像点m在像平面坐标系中的坐标记为(x,y)t,f为相机的焦距;
32、以及
33、
34、其中,相机图像离散化后的像素是一个矩形,其长、宽分别为dx、dy,图像点坐标为(x,y,1)t,离散化后的坐标为(u,v,1)t。
35、在上述基于半固态lidar的小型通用激光扫描仪的构建方法中,树莓派上的程序是通过linux编程实现,手机上的程序是通过java编程实现。
36、与现有技术相比,本发明的有益效果:本发明装置首次实现了脱离电脑的扫描技术,同时能够极大地降低三维激光扫描仪的成本,推动了三维激光扫描技术的发展。本发明结构简易灵活,算法更为简单新颖,应用场景更大,受众群体也更广。该设备性能优良,能满足所有三位建模扫描仪的基本功能,且体积小巧。
技术特征:
1.基于半固态lidar的小型通用激光扫描仪,其特征在于,包括电池、转接头、livox-mid 40扫描头、树莓派、转台、相机和移动端;转台在最下部,转台上方设置滑环,滑环之上设置livox-mid 40扫描头,livox-mid 40扫描头之上设置电池,电池之上设置树莓派,树莓派之上设置转接头;手机wifi连接树莓派,转台通过can总线与树莓派相连,livox-mid 40扫描头通过以太网与树莓派相连,相机通过usb线与树莓派相连;电池为livox-mid 40扫描头供电。
2.根据权利要求1所述基于半固态lidar的小型通用激光扫描仪的构建方法,其特征在于,通过激光扫描仪得到环境三维彩色模型包括:
3.根据权利要求2所述基于半固态lidar的小型通用激光扫描仪的构建方法,其特征在于,所述激光点云的坐标纠正,建立三维点云模型包括:
4.根据权利要求2所述基于半固态lidar的小型通用激光扫描仪的构建方法,其特征在于,所述三维点云模型与照片进行匹配,生成有色三维模型包括:将扫描仪坐标系转成像素坐标系,从而提取对应点的灰度值,对点云进行赋色,生成有色三维模型;具体步骤如下:
5.根据权利要求2所述基于半固态lidar的小型通用激光扫描仪的构建方法,其特征在于,树莓派上的程序是通过linux编程实现,手机上的程序是通过java编程实现。
技术总结
本发明涉及三维建模技术,具体涉及基于半固态LiDAR的小型通用激光扫描仪及构建方法。该扫描仪包括Livox‑Mid 40扫描头、树莓派、转台、相机和移动端;转台在最下部,转台上方设置滑环,滑环之上设置Livox‑Mid 40扫描头,Livox‑Mid 40扫描头之上设置电池,电池之上设置树莓派,树莓派之上设置转接头;手机WiFi连接树莓派,转台通过CAN总线与树莓派相连,Livox‑Mid 40扫描头与树莓派相连,相机通过USB线与树莓派相连;电池为Livox‑Mid 40扫描头供电。该扫描仪首次实现了脱离电脑的扫描技术,同时能够极大地降低三维激光扫描仪的成本,推动了三维激光扫描技术的发展。
技术研发人员:黄逸飞,马克,龚淇瑞,马硕,邓静怡,芦蓁,戴龙
受保护的技术使用者:武汉大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!