一种基于生成对抗网络的高分辨雷达前视成像方法
本发明属于雷达成像,涉及机载雷达前视成像信号处理技术,具体涉及一种基于生成对抗网络的高分辨雷达前视成像方法。
背景技术:
1、为获取二维高分辨图像,运动平台雷达往往采用合成孔径雷达(sar)技术或多普勒波束锐化(dbs)技术实现成像。合成孔径雷达是在载机雷达平台运动过程中,利用真实尺寸较小的单天线按照一定的频率发射脉冲信号,并对回波信号的相干积累形成等效长线性阵列。dbs是利用不同方位目标的多普勒频率不同,从而实现分辨不同方位目标的目的。然而,现有的sar与dbs成像无法覆盖飞行路线正前方,这是因为在载机雷达运动路线的正前方和前下方,sar和dbs接收到的回波多普勒梯度几乎为零,导致方位分辨率急剧下降,而且在正前方和前下方左右对称的目标回波的多普勒中心频率相同,导致左右模糊的现象,从而形成所谓的成像“盲区”。而前视区域对于运动平台来说,恰恰是一个极为重要、敏感的区域,对飞机盲着陆、末端制导、战场侦查等都有着重大意义。
2、实波束成像技术可用于前视成像。但是,其方位分辨率受到天线波束宽度和作用距离的限制,无法实现方位向高分辨率成像。为了提高真实孔径雷达(real apertureradar,rar)的分辨率,科学研究者们提出了许多提高方位分辨率的算法。目前,主要的前视成像技术包括:实波束成像技术、解卷积成像技术、双基地sar前视成像技术、单脉冲成像技术、阵列雷达超分辨成像技术等。
3、解卷积成像技术,利用雷达回波的方位向为天线方向图水平面与方位向散射点的卷积,回波距离向为天线方向图垂直面与距离散射点的卷积,因此,理想情况下,通过距离向、方位向分别解卷积能够重建目标的准确位置。但是因为解卷积过程中采用的天线方向图与实际有差距,难以得到精确稳定的解,不能达到理想的方位分辨率。
4、双基地sar在对前视方向进行成像的过程中,发射机和接收机分置在两个不同的平台上,等距离线和等多普勒线近似正交,有效地提高前视区域成像的分辨能力。但是,目前此技术还不成熟,存在很多新的理论和技术问题,无法用于实际情况。
5、单脉冲技术是利用两根天线同时接收回波,通过单个脉冲就能获取散射点偏离波束中心的角度。单脉冲的测角精度很高,且获取数据速率很快,但当成像区域地形复杂且载机平台在运动时,目标的视在中心会偏离目标实际中心,产生角闪烁现象。而且,它不能区分一个波束内的多个目标,所以当一个波束内存在多个目标时,性能急剧恶化。
6、针对以上问题,基于神经网络的深度学习方法为前视成像问题提供新的思路。构建生成对抗网络,通过监督学习的方式来刻画高分辨率图像的特征,并通过端到端的方式直接生成高分辨率图像,本质上将问题转化为求解预测图像和真实图像之间的损失函数最小化问题。
技术实现思路
1、发明目的:本发明所要解决的技术问题是针对背景技术中所涉及到的缺陷,提供一种基于生成对抗网络的高分辨雷达前视成像方法,采用生成对抗算法,通过网络训练探索真实数据与重构图像之间复杂的非线性映射关系,自行建立隐式成像模型,最大限度拟合输入与输出之间精确的映射关系。
2、技术方案:本发明提供了一种基于生成对抗网络的高分辨雷达前视成像方法,具体包括以下步骤:
3、(1)对高分辨率雷达图像进行预处理,根据前视成像模型得到低分辨率图像,并构建数据集;
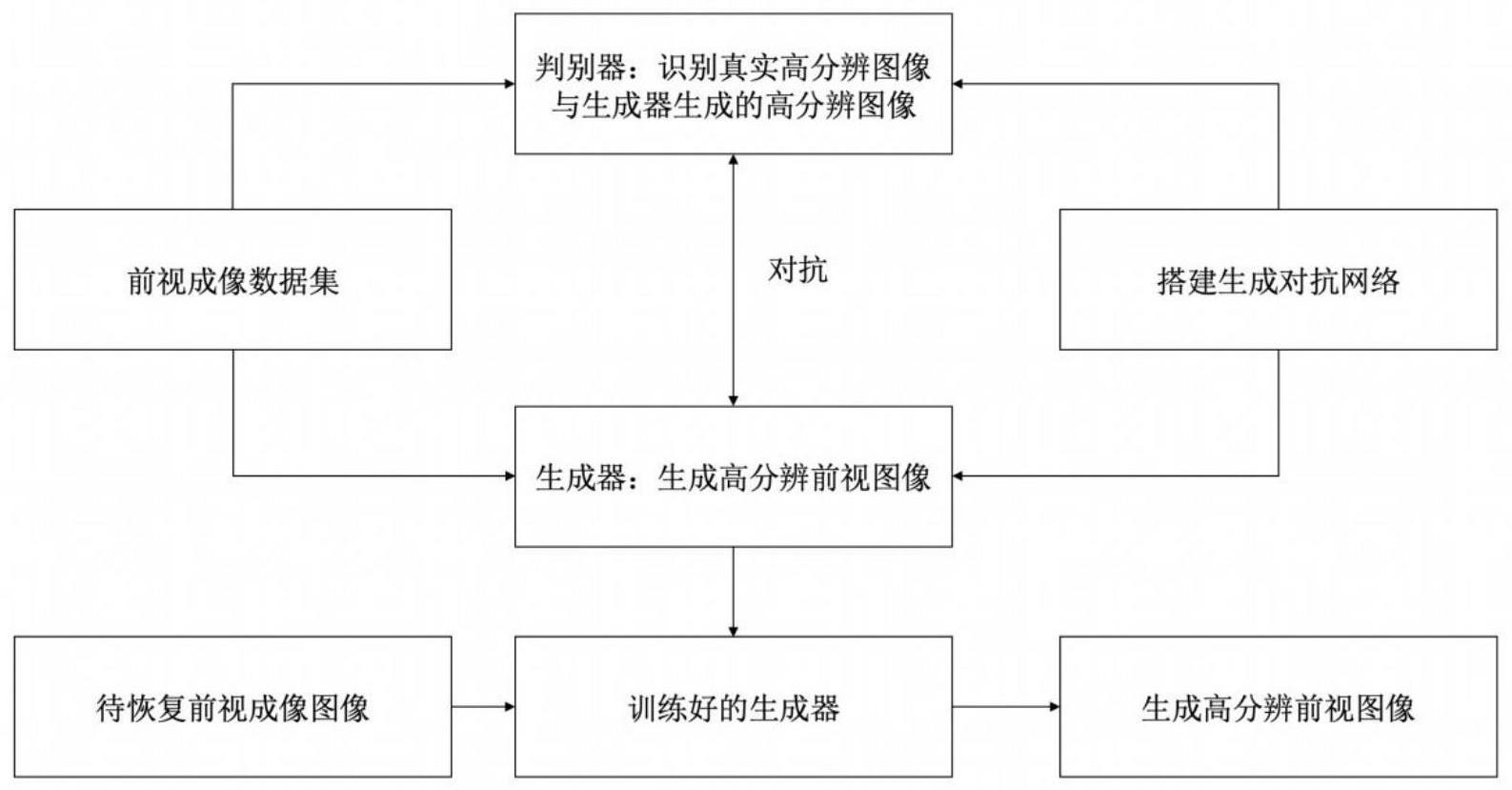
4、(2)构建生成对抗网络模型,包括生成器和判别器;通过将待处理图像输入生成器,得到伪数据,将伪数据与真实数据输入判别器进行二分类判别;
5、(3)将步骤(1)得到的数据集输入生成对抗网络中进行训练,以对抗损失、感知损失以及生成图像与原图相似度为优化目标,交替更新生成对抗网络的判别器和生成器,优化生成器;
6、(4)将待处理的图像输入到训练完毕的生成器中,得到对应的高分辨率图像。
7、进一步地,所述步骤(1)实现过程如下:
8、将高分辨率雷达图像裁切为尺寸统一的高分辨率数据集;将高分辨率图像与天线方向图进行卷积并添加噪声,得到低分辨率数据集。
9、进一步地,步骤(2)所述生成器基于fpn结构实现,由输入层、fpn层、头部层、插值重建模块、残差块和输出层构成;其中,输入层接收一张低分辨率的图像作为输入;fpn层将不同尺度的特征图级联起来,获得丰富的、多尺度的特征信息;在fpn层之上添加了多个头部层,每个头部层都负责生成高分辨率图像的一部分内容;插值重建模块将头部层生成的高分辨率图像级联起来,并通过上采样操作将它们融合到一起;残差块将重建后的图像与输入的低分辨率图像相加,并通过tanh激活函数将输出限制在[-1,1]范围内;输出层是一个卷积层,将残差块的输出转换为最终的高分辨率图像。
10、进一步地,步骤(2)所述判别器由卷积层、bn层、relu激活层组成,最终通过全连接层和sigmoid激活函数得到判别损失。
11、进一步地,所述残差块由两组卷积层、bn层、激活层组成,其中激活函数为relu函数,其中第二组的激活层实际为元素操作层;将低分辨率图像的边缘和纹理特征作为先验信息,利用递归残差网络的特点在残差分支上提取边缘和纹理,最后将不同的特征进行组合并通过亚像素卷积层进行重建。
12、进一步地,所述插值重建模块包括上采样、特征图拼接、卷积、规范化、激活函数、再次上采样和残差块;上采样操作将低分辨率图像重建成高分辨率图像,使用的是双线性插值的方法;特征图拼接操作将不同尺度的特征图级联起来,构成高分辨率图像的部分内容。
13、进一步地,所述步骤(3)的实现过程如下:
14、利用pytorch深度学习平台,优化函数为adam,基础学习率设置为10e-4,学习策略step为100000,gamma为0.1,采用gpu进行加速训练;将训练集中成对的高、低分辨率图像作为样本输入,将低分辨率图像输入生成器中,得到重建后的高分辨率图像;将重建后的高分辨率图像和真实的高分辨率图像送入感知网络,得到感知损失,最终得到生成损失;将两幅高分辨率图像送入判别器中,得到判别信息,并将判别信息反向传播至生成器,进行参数调整。
15、有益效果:与现有技术相比,本发明的有益效果:本发明基于具有双尺度鉴别器的条件生成对抗网络,引入特征金字塔作为生成器的核心模块,构建真实数据与重构图像之间复杂的非线性映射关系,引入感知损失提高了生成效果;从仿真数据以及真实获得的数据处理结果表明,与实波束成像方法相比,成像效果得到显著增强。
技术特征:
1.一种基于生成对抗网络的高分辨雷达前视成像方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于生成对抗网络的高分辨雷达前视成像方法,其特征在于,所述步骤(1)实现过程如下:
3.根据权利要求1所述的基于生成对抗网络的高分辨雷达前视成像技术,其特征在于,步骤(2)所述生成器基于fpn结构实现,由输入层、fpn层、头部层、插值重建模块、残差块和输出层构成;其中,输入层接收一张低分辨率的图像作为输入;fpn层将不同尺度的特征图级联起来,获得丰富的、多尺度的特征信息;在fpn层之上添加了多个头部层,每个头部层都负责生成高分辨率图像的一部分内容;插值重建模块将头部层生成的高分辨率图像级联起来,并通过上采样操作将它们融合到一起;残差块将重建后的图像与输入的低分辨率图像相加,并通过tanh激活函数将输出限制在[-1,1]范围内;输出层是一个卷积层,将残差块的输出转换为最终的高分辨率图像。
4.根据权利要求1所述的基于生成对抗网络的高分辨雷达前视成像技术,其特征在于,步骤(2)所述判别器由卷积层、bn层、relu激活层组成,最终通过全连接层和sigmoid激活函数得到判别损失。
5.根据权利要求3所述的基于生成对抗网络的高分辨雷达前视成像技术,其特征在于,所述残差块由两组卷积层、bn层、激活层组成,其中激活函数为relu函数,其中第二组的激活层实际为元素操作层;将低分辨率图像的边缘和纹理特征作为先验信息,利用递归残差网络的特点在残差分支上提取边缘和纹理,最后将不同的特征进行组合并通过亚像素卷积层进行重建。
6.根据权利要求3所述的基于生成对抗网络的高分辨雷达前视成像技术,其特征在于,所述插值重建模块包括上采样、特征图拼接、卷积、规范化、激活函数、再次上采样和残差块;上采样操作将低分辨率图像重建成高分辨率图像,使用的是双线性插值的方法;特征图拼接操作将不同尺度的特征图级联起来,构成高分辨率图像的部分内容。
7.根据权利要求1所述的基于生成对抗网络的高分辨雷达前视成像技术,其特征在于,所述步骤(3)的实现过程如下:
技术总结
本发明公开了一种基于生成对抗网络的高分辨雷达前视成像方法,对高分辨率雷达图像进行预处理,根据前视成像模型得到低分辨率图像,并构建数据集;构建生成对抗网络模型,包括生成器和判别器;通过将待处理图像输入生成器,得到伪数据,将伪数据与真实数据输入判别器进行二分类判别;将数据集输入生成对抗网络中进行训练,以对抗损失、感知损失以及生成图像与原图相似度为优化目标,交替更新生成对抗网络的判别器和生成器,优化生成器。将待处理的图像输入到训练完毕的生成器中,得到对应的高分辨率图像。本发明能够更大程度上的提取前视图像的特征,还原高分辨率图像的纹理细节。
技术研发人员:吴迪,李芳凝,朱岱寅
受保护的技术使用者:南京航空航天大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!