蝶阀密封面识别方法
本发明涉及一种蝶阀密封面识别方法。
背景技术:
1、蝶阀因其结构简单,较小力矩开启,在业内广泛引用,因防泄漏是蝶阀主要特性,所以研究其密封面参数显得尤为重要,对于蝶阀密封面的测量传统的是通过手工游标卡尺测量,加工精度很差。
技术实现思路
1、本发明的目的在于提供一种蝶阀密封面识别方法。
2、为解决上述问题,本发明提供一种蝶阀密封面识别方法,包括:
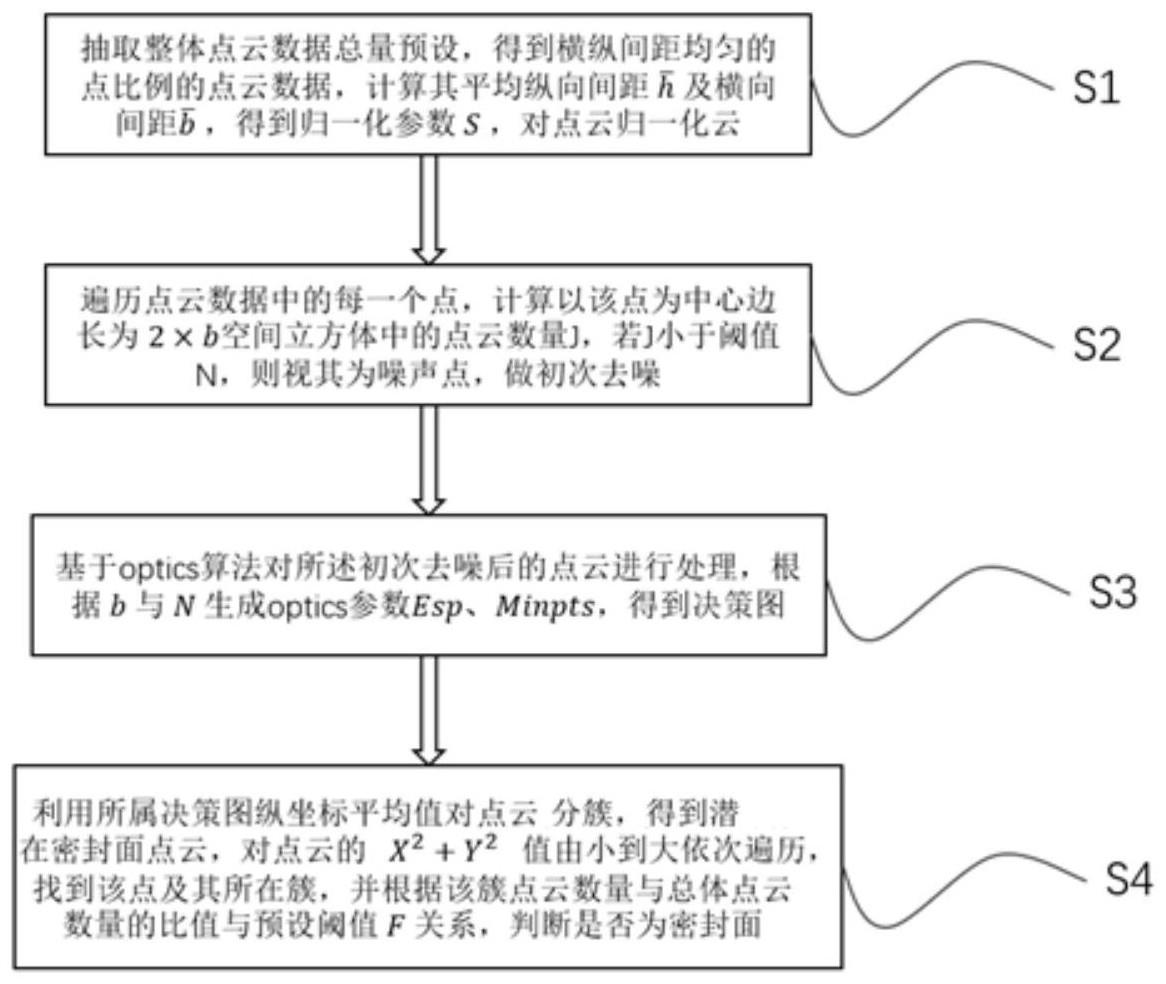
3、步骤s1,获取待识别的蝶阀密封面的整体点云数据,基于待识别的蝶阀密封面的整体点云数据计算平均纵向间距及横向间距基于平均纵向间距及横向间距得到归一化参数s,基于归一化参数s对待识别的蝶阀密封面的整体点云数据进行归一化,得到横纵间距均匀的点云数据;
4、步骤s2,遍历所示横纵间距均匀的点云数据中的每一个点,计算以该点为中心边长为2×b空间立方体中的点云数量j,若j小于阈值n,则视该点为噪声点,将该点从横纵间距均匀的点云数据中删除,以得到初次去噪后的点云数据;
5、在此,因激光位移传感器具有高精度的特点,能够获得海量点云,所以采用激光扫描来获得物体表面特征在逆向工程中运用的越来越广泛,但由于光照、振动等外界因素的存在,得到的扫描数据就会存在噪声。因此,对点云数据进行去噪有利于得到更能反应表面特征的点云数据。
6、步骤s3,基于optics算法对所述初次去噪后的点云数据进行处理,根据b与n生成optics参数esp和minpts,基于optics算法和参数esp、minpts得到决策图;
7、步骤s4,利用所述决策图的纵坐标平均值对初次去噪后的点云数据进行分簇,以得到潜在的密封面点云数据;计算潜在的密封面点云数据中的每个点的坐标平方值=x2+y2,其中,x为某个点的横坐标,y为某个点的坐标;按照坐标平方值由小到大依次遍历密封面点云数据中的各个点,找到当前遍历到的点的所在的簇,并根据当前遍历到的点所在的簇中的点云数量与初次去噪后的点云数据中的点云数量的比值与预设阈值f关系,判断是否为蝶阀密封面。
8、进一步的,在上述方法中,步骤s1,包括:
9、s11,获取待识别的蝶阀密封面的整体点云数据,找到待识别的蝶阀密封面的整体点云数据中的每一点所在的层,其中,同一层上的点的纵向z坐标值一致;将该点所在的层之外的相邻层内的离该点最近的点距离作为该点最近纵向距离h,计算所有的点的平均纵向距离在该点所在的层的xy平面里找到离该点最近的点距离作为该点最近横向距离b,计算所有的点平均横向距离
10、s12,利用平均纵向间距及横向间距得到归一化参数s,基于归一化参数s对待识别的蝶阀密封面的整体点云数据进行归一化,得到横纵间距均匀的点云数据,其中,横纵间距均匀的点云数据中的每个点的x轴坐标和y轴坐标,与待识别的蝶阀密封面的整体点云数据中对应的点的x轴和y轴坐标相同,横纵间距均匀的点云数据中的每个点的的z轴坐标,等于待识别的蝶阀密封面的整体点云数据中对应的点的z轴坐标乘以归一化参数s。
11、进一步的,在上述方法中,所述归一化参数s根据如下公式获取:
12、
13、进一步的,在上述方法中,所述步骤s2,包括:
14、步骤s21,对横纵间距均匀的点云数据中每个点,都以该点为中心根据下述公式划分边长为2×b的空间立方体;
15、步骤s22,计算每个立方体内点的数量j,若小于阈值n,则将坐标为x、y、z的该点当作噪声点,从横纵间距均匀的点云数据中去除,以得到初次去噪后的点云数据。
16、进一步的,在上述方法中,所述步骤s21,包括:
17、横纵间距均匀的点云数据中的某个点的坐标为x、y、z,则该点的2×b的立方体空间范围中除该点之外的任意一点的x1、y1、z1坐标满足式条件;
18、
19、进一步的,在上述方法中,所述阈值n的预设值为4。
20、进一步的,在上述方法中,所述步骤s3中,optics参数esp和minpts根据如下公式求取,包括:
21、
22、进一步的,在上述方法中,基于optics算法和参数esp、minpts得到决策图,包括:
23、基于optics算法和参数esp、minpts,将初次去噪后的点云数据中的每个三维的点,一一对应到决策图中的一个二维的点。
24、进一步的,在上述方法中,所述步骤s4包括:
25、s41,利用所述决策图,计算决策图中的每个点的纵坐标即rd平均值c,用rd平均值c对决策图进行划分,完成分簇,其中,基于rd平均值c,将小于1.2*c的连续的二维的点(optics算法重新)作为一个簇,将大于等于1.2*c的每个二维的点作为一个单独的族;
26、s42,将rd值小于1.2*c的簇取出作为潜在的密封面点云数据;
27、s43,计算潜在的密封面点云数据中的每个点的坐标平方值=x2+y2;
28、s44,在所述潜在密封面点云中找到点坐标平方值=x2+y2最小的点及其所在的簇,计算所在的簇的点云的数量与初次去噪后的点云数据中的点云数量的比值,若比值大于预设阈值f,则判断所在的簇为密封面;
29、s45,若比值小于等于预设阈值f,在所述潜在密封面点云中找到下一个点坐标平方值=x2+y2最小的点后,重新转到步骤s44,直到找到所在簇数量占比大于预设阈值的点。
30、进一步的,在上述方法中,所述rd平均值c根据如下公式求取:
31、
32、其中,n为决策图中二维的点的数量,(rd)n为optics算法中决策图每个点的可达距离。
33、与现有技术相比,本发明通过基于待识别的蝶阀密封面的整体点云数据,得到横纵间距均匀的点云数据;对横纵间距均匀的点云数据进行去噪,得到初次去噪后的点云数据;对初次去噪后的点云数据进行处理,根据b与n生成optics参数esp和minpts,基于optics算法和参数esp、minpts得到决策图;利用所述决策图的纵坐标平均值对初次去噪后的点云数据进行分簇,以得到潜在的密封面点云数据;基于所述分簇,根据当前遍历到的点所在的簇中的点云数量与初次去噪后的点云数据中的点云数量的比值与预设阈值f关系,判断是否为蝶阀密封面。本发明通过第一次去噪,去除较离散的噪声点,使得将rd的平均值作为第二次去噪的分界线变得可靠;对点云的x2+y2值由小到大依次遍历,并通过占比进一步判断蝶阀密封面,提高了方法的准确率。后续可以基于识别到的蝶阀密封面,可以计算蝶阀密封面的锥角,基于蝶阀密封面的锥角可以验证蝶阀的加工精度。
技术特征:
1.一种蝶阀密封面识别方法,其特征在于,包括:
2.如权利要求1所述的蝶阀密封面识别方法,其特征在于,步骤s1,包括:
3.如权利要求2所述的蝶阀密封面识别方法,其特征在于,所述归一化参数s根据如下公式获取:
4.如权利要求1所述的蝶阀密封面识别方法,其特征在于,所述步骤s2,包括:
5.如权利要求4所述的蝶阀密封面识别方法,其特征在于,所述步骤s21,包括:
6.如权利要求4所述的蝶阀密封面识别方法,其特征在于,所述阈值n的预设值为4。
7.如权利要求4所述的蝶阀密封面识别方法,其特征在于,所述步骤s3中,optics参数esp和minpts根据如下公式求取,包括:
8.如权利要求1所述的蝶阀密封面识别方法,其特征在于,步骤s3中,基于optics算法和参数esp、minpts得到决策图,包括:
9.如权利要求1所述的蝶阀密封面识别方法,其特征在于,所述步骤s4包括:
10.如权利要求9所述的蝶阀密封面识别方法,其特征在于,所述rd平均值c根据如下公式求取:
技术总结
本发明提供了一种蝶阀密封面识别方法,本发明通过对待识别的蝶阀密封面的整体点云数据进行第一次去噪,去除较离散的噪声点,使得将RD的平均值作为第二次去噪的分界线变得可靠;对点云的X<supgt;2</supgt;+Y<supgt;2</supgt;值由小到大依次遍历,并通过占比进一步判断蝶阀密封面,提高了方法的准确率。后续可以基于识别到的蝶阀密封面,可以计算蝶阀密封面的锥角,基于蝶阀密封面的锥角可以验证蝶阀的加工精度。
技术研发人员:张旭,李锦,于新海,陈时健,任利杰,陈尚书
受保护的技术使用者:华东理工大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!