一种视差确定方法及电子设备与流程
本申请涉及数据处理领域,尤其涉及一种视差确定方法及电子设备。
背景技术:
1、立体匹配是立体视觉研究中的关键部分,其目标是在两个或多个视点中匹配相应像素点,计算视差。
2、sgm(semi-global matching)是一种用于计算双目视觉中视差的半全局匹配算法,其主要包括匹配代价计算、代价聚合、视差计算及视差优化。然而,在代价聚合阶段,通常需要对每个像素点进行4方向或8方向的代价融合,使得视差计算的效率降低。
技术实现思路
1、有鉴于此,本申请提供一种视差确定方法及电子设备,其具体方案如下:
2、一种视差确定方法,包括:
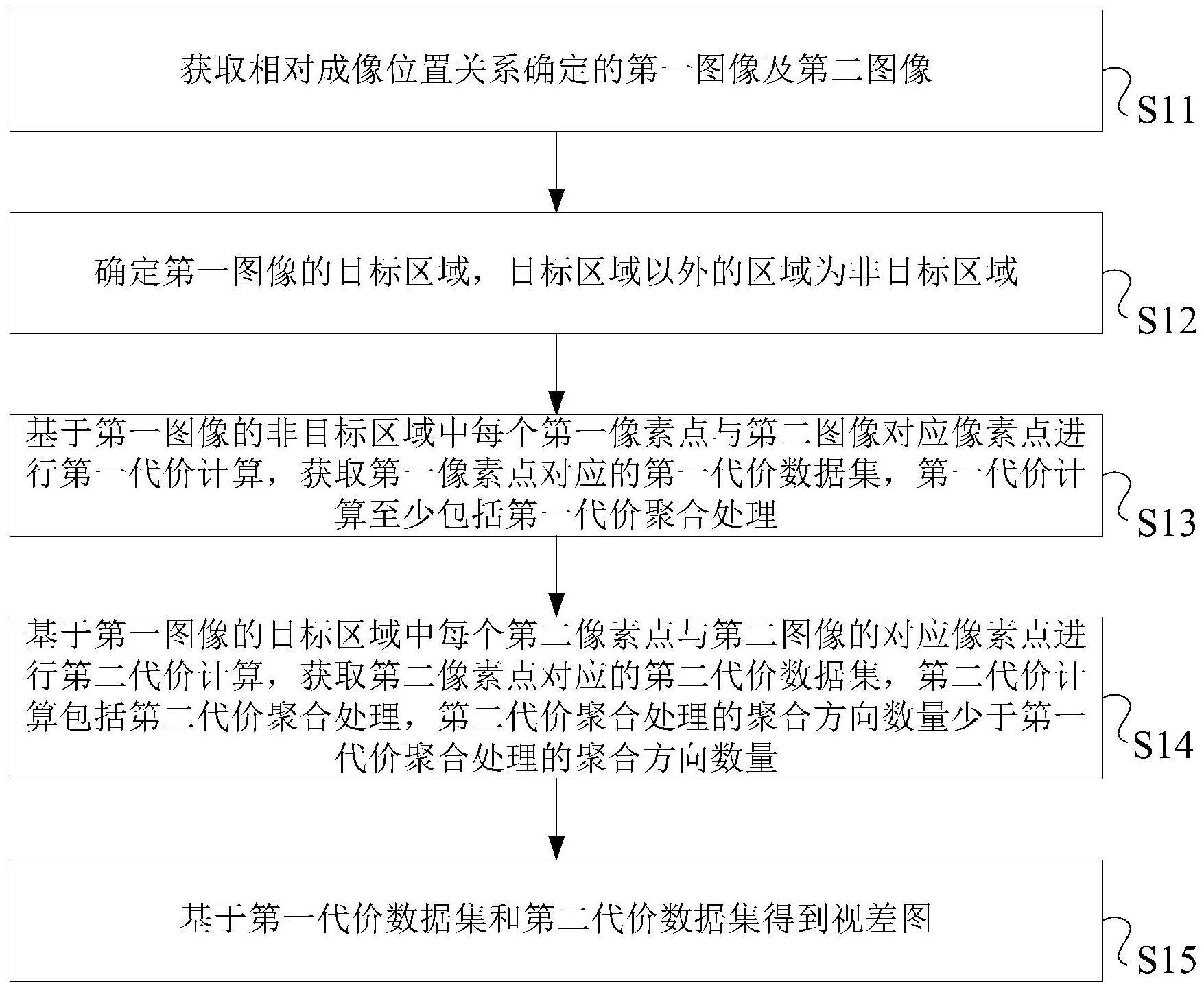
3、获取相对成像位置关系确定的第一图像及第二图像;
4、确定所述第一图像的目标区域,所述目标区域以外的区域为非目标区域;
5、基于所述第一图像的非目标区域中每个第一像素点与第二图像对应像素点进行第一代价计算,获取第一像素点对应的第一代价数据集,所述第一代价计算至少包括第一代价聚合处理;
6、基于所述第一图像的目标区域中每个第二像素点与所述第二图像的对应像素点进行第二代价计算,获取第二像素点对应的第二代价数据集,所述第二代价计算包括第二代价聚合处理,其中,所述第二代价聚合处理的聚合方向数量少于所述第一代价聚合处理的聚合方向数量;
7、基于所述第一代价数据集和所述第二代价数据集得到视差图。
8、进一步的,所述确定所述第一图像的目标区域,包括:
9、响应用户的指定操作,确定所述第一图像中的第一区域,或者,基于所述第一图像的图像数据,识别所述第一图像中的目标成像主体所在的第一区域,所述目标成像主体位于所述第一区域内;
10、基于所述第一区域确定所述第一图像中的目标区域,所述目标区域至少包括所述第一区域内的目标成像主体。
11、进一步的,所述确定所述第一图像的目标区域,包括:
12、获得所述第一图像的第一区域;
13、对所述第一区域进行图像提取,确定所述第一区域中的目标成像主体,将所述目标成像主体部分确定为所述第一图像的目标区域。
14、进一步的,所述基于所述第一图像的图像数据,识别所述第一图像中的目标成像主体所在的第一区域,包括:
15、基于深度神经网络机制的分割模型,对所述第一图像的图像数据进行分割,获得所述第一图像中的目标成像主体所在的第一区域。
16、进一步的,
17、每个第一像素点分别对应一个第一代价数据集;
18、所有第二像素点对应同一个第二代价数据集。
19、进一步的,所述第一代价计算包括:
20、为每个第一像素点分别分配相应的独立代价存储空间,用于分别存储各个第一像素点各自对应的第一代价数据集,每个第一像素点单独对应于一个独立代价存储空间。
21、进一步的,所述第二代价计算包括:
22、为所述目标区域内的所有第二像素点分配共享代价存储空间,用于存储第二代价数据集,所述目标区域内的所有第二像素点共享所述第二代价数据集。
23、进一步的,所述共享所述第二代价数据集,包括:
24、获取各第二像素点分别对应的第三代价数据集,所述第三代价数据集包括多个第二代价值;
25、对各第三代价数据集中对应位置的第二代价值进行共享处理,获得共享第二代价值,多个位置的共享第二代价值构成所述第二代价数据集。
26、进一步的,所述对各对应位置的第二代价值进行共享处理,包括:
27、对各对应位置的第二代价值进行平滑处理。
28、一种电子设备,包括:
29、图像采集装置,用于获得相对成像位置关系确定的第一图像及第二图像;
30、处理器,用于确定所述第一图像的目标区域,所述目标区域以外的区域为非目标区域;基于所述第一图像的非目标区域中每个第一像素点与第二图像对应像素点进行第一代价计算,获取第一像素点对应的第一代价数据集,所述第一代价计算至少包括第一代价聚合处理;基于所述第一图像的目标区域中每个第二像素点与所述第二图像的对应像素点进行第二代价计算,获取第二像素点对应的第二代价数据集,所述第二代价计算包括第二代价聚合处理,其中,所述第二代价聚合处理的聚合方向数量少于所述第一代价聚合处理的聚合方向数量;基于所述第一代价数据集和所述第二代价数据集得到视差图。
31、从上述技术方案可以看出,本申请公开的视差确定方法及电子设备,获取相对成像位置关系确定的第一图像及第二图像;确定第一图像的目标区域,目标区域以外的区域为非目标区域;基于第一图像的非目标区域中每个第一像素点与第二图像对应像素点进行第一代价计算,获取第一像素点对应的第一代价数据集,第一代价计算至少包括第一代价聚合处理;基于第一图像的目标区域中每个第二像素点与第二图像的对应像素点进行第二代价计算,获取第二像素点对应的第二代价数据集,第二代价计算包括第二代价聚合处理,其中,第二代价聚合处理的聚合方向数量少于第一代价聚合处理的聚合方向数量;基于第一代价数据集和第二代价数据集得到视差图。
技术特征:
1.一种视差确定方法,包括:
2.根据权利要求1所述的方法,其中,所述确定所述第一图像的目标区域,包括:
3.根据权利要求1或2所述的方法,其中,所述确定所述第一图像的目标区域,包括:
4.根据权利要求2所述的方法,其中,所述基于所述第一图像的图像数据,识别所述第一图像中的目标成像主体所在的第一区域,包括:
5.根据权利要求1所述的方法,其中,
6.根据权利要求1所述的方法,其中,所述第一代价计算包括:
7.根据权利要求6所述的方法,其中,所述第二代价计算包括:
8.根据权利要求7所述的方法,其中,所述共享所述第二代价数据集,包括:
9.根据权利要求8所述的方法,其中,所述对各对应位置的第二代价值进行共享处理,包括:
10.一种电子设备,包括:
技术总结
本申请公开了一种视差确定方法及电子设备,获取相对成像位置关系确定的第一图像及第二图像;确定第一图像的目标区域,目标区域以外的区域为非目标区域;基于第一图像的非目标区域中每个第一像素点与第二图像对应像素点进行第一代价计算,获取第一像素点对应的第一代价数据集,第一代价计算至少包括第一代价聚合处理;基于第一图像的目标区域中每个第二像素点与第二图像的对应像素点进行第二代价计算,获取第二像素点对应的第二代价数据集,第二代价计算包括第二代价聚合处理,其中,第二代价聚合处理的聚合方向数量少于第一代价聚合处理的聚合方向数量;基于第一代价数据集和第二代价数据集得到视差图。
技术研发人员:乔瑞
受保护的技术使用者:鼎道智芯(上海)半导体有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!