铁路货车人力制动机导向杆卡滞故障识别方法与流程
本发明涉及一种铁路货车人力制动机导向杆卡滞故障识别方法,属于铁路货车故障检测领域。
背景技术:
1、铁路货车是一种常见的交通工具,每日有大量的货车在线上运行。在各种外界环境的影响下,各部件产生故障无法避免。
2、人力制动机导向杆卡滞故障是一种危及行车安全的故障,如果未及时发现故障可能产生严重后果。目前主要是用人眼对整车进行故障查找,查找范围大部件多、车辆多、故障形态多,所以这项工作是一个重复性强且强度高易疲劳的机械性作业。当工人疲劳时很容易,造成漏检、错检的出现,影响行车安全。
技术实现思路
1、针对如何提高人力制动机导向杆卡滞故障检测效率、准确率的问题,本发明提供一种铁路货车人力制动机导向杆卡滞故障识别方法。
2、本发明的一种铁路货车人力制动机导向杆卡滞故障识别方法,包括:
3、s1、获取包括人力制动机导向杆的铁路货图像;
4、s2、将铁路图像输入至分割模型中,分割模型分割出端梁、人力制动机拉杆;
5、分割模型的输入图像包括粗边缘信息,分割模型采用unet网络实现,并在unet网络的下采样之前加入空间注意力机制;
6、s3、获取端梁和人力制动机拉杆之间的距离,若端梁和人力制动机拉杆的距离小于给定阈值,则认为发生人力制动机导向杆卡滞故障,进行报警。
7、作为优选,采用canny算法获取粗边缘信息。
8、作为优选,获取粗边缘信息的方法包括:
9、对输入图像进行高斯模糊;
10、计算高斯模糊后的图像的梯度幅值和方向;
11、根据梯度幅值和方向进行最大值抑制;
12、对最大值抑制后的图像进行滞后边界追踪。
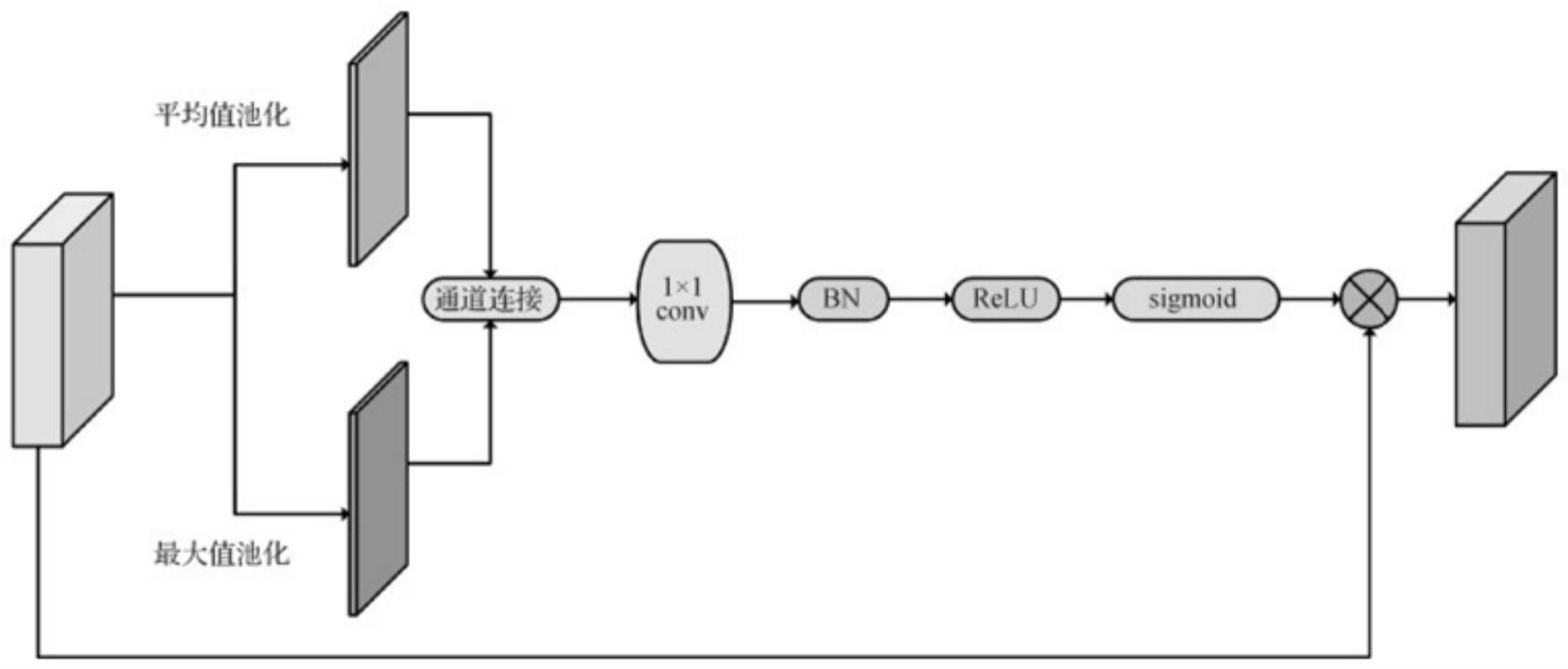
13、作为优选,空间注意力机制包括:
14、将输入的特征图在通道维度上分别进行最大值全局池化和平均值全局池化,将最大值全局池化和平均值全局池化的输出进行连接后,采用1×1卷积核进行学习,将得到的特征图通过激活函数计算出注意力输出响应。
15、作为优选,最大值全局池化为:
16、o(i,j)=max(im(i,j)),m∈(1,c)
17、式中,im(i,j)为第m个通道上的特征图在(i,j)位置的特征值,o(i,j)为经过最大值池化后的特征图,c为通道数,i,j为像素的横纵坐标。
18、作为优选,平均值全局池化为:
19、p(i,j)=∑tn(i,j)/c,n∈(1,c)
20、式中,tn(i,j)为第n个通道特征图在(i,j)位置的特征值,p(i,j)为经过平均值池化后的特征图。
21、作为优选,激活函数采用sigmoid函数:
22、s(x)=1/(1+e-x)
23、式中,s(x)为注意力输出响应,x为采用1×1卷积核进行学习后的图像。
24、作为优选,分割模型的训练集包括:
25、收集不同时间段不同环境下的铁路货车图像,且根据轴距信息,截取包含人力制动机导向杆卡的子图像。
26、本发明的有益效果,本发明使用深度学习的方式进行故障识别可以有效的识别故障。进而代替传统的人工检测,可以解决人工检测长时间重复看图的疲劳问题,对于同种故障统一标准,提高检测效率、准确率,本发明采用多通道图像输入搭配空间注意力机制的方法,更好的获取连续边缘,提高检测效率、准确率。
技术特征:
1.铁路货车人力制动机导向杆卡滞故障识别方法,其特征在于,所述方法包括:
2.根据权利要求1所述的铁路货车人力制动机导向杆卡滞故障识别方法,其特征在于,采用canny算法获取粗边缘信息。
3.根据权利要求2所述的铁路货车人力制动机导向杆卡滞故障识别方法,其特征在于,获取粗边缘信息的方法包括:
4.根据权利要求1所述的铁路货车人力制动机导向杆卡滞故障识别方法,其特征在于,所述空间注意力机制包括:
5.根据权利要求4所述的铁路货车人力制动机导向杆卡滞故障识别方法,其特征在于,最大值全局池化为:
6.根据权利要求5所述的铁路货车人力制动机导向杆卡滞故障识别方法,其特征在于,平均值全局池化为:
7.根据权利要求4所述的铁路货车人力制动机导向杆卡滞故障识别方法,其特征在于,激活函数采用sigmoid函数:
8.根据权利要求1所述的铁路货车人力制动机导向杆卡滞故障识别方法,其特征在于,所述分割模型的训练集包括:
9.一种计算机可读的存储设备,所述存储设备存储有计算机程序,其特征在于,所述计算机程序被执行时实现如权利要求1至8任一所述铁路货车人力制动机导向杆卡滞故障识别方法。
10.一种铁路货车人力制动机导向杆卡滞故障识别装置,包括存储设备、处理器以及存储在所述存储设备中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序实现如权利要求1至8任一所述铁路货车人力制动机导向杆卡滞故障识别方法。
技术总结
铁路货车人力制动机导向杆卡滞故障识别方法,解决了如何提高人力制动机导向杆卡滞故障检测效率、准确率的问题,属于铁路货车故障检测领域。本发明包括:获取包括人力制动机导向杆的铁路货图像;将铁路图像输入至分割模型中,分割模型分割出端梁、人力制动机拉杆;分割模型的输入图像包括粗边缘信息,分割模型采用UNet网络实现,并在UNet网络的下采样之前加入空间注意力机制;获取端梁和人力制动机拉杆之间的距离,若端梁和人力制动机拉杆的距离小于给定阈值,则认为发生人力制动机导向杆卡滞故障,进行报警。本发明采用多通道图像输入搭配空间注意力机制的方法,更好的获取连续边缘,提高检测效率、准确率。
技术研发人员:蒋弘瑞
受保护的技术使用者:哈尔滨市科佳通用机电股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!