用于铅酸蓄电池智能充电器的视觉缺陷检测方法与流程
本发明涉及数字图像处理,具体涉及一种用于铅酸蓄电池智能充电器的视觉缺陷检测方法。
背景技术:
1、铅酸蓄电池因为较低的价格、良好的稳定性,以及技术相对成熟,所以长期以来都是世界产量最大、应用最广的二次电池产品。铅酸蓄电池在小中型电动汽车上的应用十分广泛。电动汽车的自动充电技术逐渐成熟。
2、自动充电技术中充电孔的识别基本为外孔识别,但仅通过外孔识别无法检测充电孔内部是否完好,而识别充电器内孔便可以有效的避免因充电孔内部损坏而造成的二次损伤,实现智能充电器的视觉缺陷检测。
3、相关技术中,直接通过内孔图像的采集并根据采集到的图像进行纹理缺陷检测,而由于电动汽车的充电场景多变,其不同电动汽车所对应充电孔规格也可能有所差异,光线在不同场景的表现会产生难以直接界定的模糊区域,因此,无法准确提取内孔边缘,进而导致缺陷检测的可靠性不足。
技术实现思路
1、为了解决无法准确提取内孔边缘,导致缺陷检测的可靠性不足的技术问题,本发明提供一种用于铅酸蓄电池智能充电器的视觉缺陷检测方法,所采用的技术方案具体如下:
2、本发明提出了一种用于铅酸蓄电池智能充电器的视觉缺陷检测方法,方法包括:
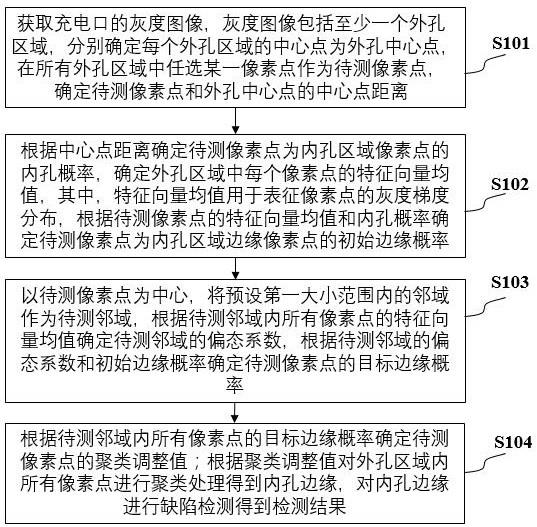
3、获取充电口的灰度图像,所述灰度图像包括至少一个外孔区域,分别确定每个所述外孔区域的中心点为外孔中心点,在所有所述外孔区域中任选某一像素点作为待测像素点,确定所述待测像素点和所述外孔中心点的中心点距离;
4、根据所述中心点距离确定所述待测像素点为内孔区域像素点的内孔概率,确定所述外孔区域中每个像素点的特征向量均值,其中,所述特征向量均值用于表征所述像素点的灰度梯度分布,根据所述待测像素点的特征向量均值和所述内孔概率确定所述待测像素点为内孔区域边缘像素点的初始边缘概率;
5、以所述待测像素点为中心,将预设第一大小范围内的邻域作为待测邻域,根据所述待测邻域内所有像素点的特征向量均值确定所述待测邻域的偏态系数,根据所述待测邻域的偏态系数和所述初始边缘概率确定所述待测像素点的目标边缘概率;
6、根据所述待测邻域内所有像素点的目标边缘概率确定所述待测像素点的聚类调整值;根据所述聚类调整值对所述外孔区域内所有像素点进行聚类处理得到内孔边缘,对所述内孔边缘进行缺陷检测得到检测结果。
7、进一步地,所述确定所述外孔区域中每个像素点的特征向量均值,包括:
8、将所有所述外孔区域按照预设第二大小划分为至少两个单元;
9、根据预设特征向量维度、所述单元中像素点的梯度方向构建所述单元的方向梯度直方图,其中,所述梯度方向直方图的横坐标为预设特征向量维度,所述梯度方向直方图的纵坐标为所述预设特征向量维度所对应的特征向量值,其中,所述特征向量值为单元中像素点的梯度方向满足预设特征向量维度的像素点的数量;
10、计算所述方向梯度直方图中每个维度的特征向量值的均值作为所述单元中每个像素点的特征向量均值。
11、进一步地,所述根据所述待测像素点的特征向量均值和所述内孔概率确定所述待测像素点为内孔区域边缘像素点的初始边缘概率,包括:
12、确定以所述待测像素点为中心点的预设第三大小的邻域为特征邻域,计算所述特征邻域内所有像素点的特征向量均值的标准差作为所述待测像素点的特征标准差;
13、计算所述内孔概率和预设第一权值的乘积作为第一概率系数,计算所述特征标准差和预设第二权值的乘积作为第二概率系数;
14、将所述第一概率系数作为分子,所述第二概率系数与预设常数系数的和值作为分母,计算得到所述初始边缘概率。
15、进一步地,所述根据所述待测邻域内所有像素点的特征向量均值确定所述待测邻域的偏态系数,包括:
16、计算所述待测邻域内所有像素点的特征向量均值的标准差为待测标准差;
17、根据所述待测邻域内所有像素点的特征向量标准差和所述特征向量均值,基于偏态系数公式计算得到所述待测邻域的偏态系数。
18、进一步地,所述根据所述待测邻域的偏态系数和所述初始边缘概率确定所述待测像素点的目标边缘概率,包括:
19、计算所述待测像素点的所述初始边缘概率和所述待测像素点所处待测邻域的偏态系数的乘积,得到所述待测像素点的目标边缘概率。
20、进一步地,所述根据所述待测邻域内所有像素点的目标边缘概率确定所述待测像素点的聚类调整值,包括:
21、基于游程矩阵对所述目标边缘概率进行特征提取,得到所述待测像素点的长游程强调值;
22、将所述长游程强调值作为所述待测像素点的聚类调整值。
23、进一步地,所述根据所述聚类调整值对所述外孔区域内所有像素点进行聚类处理得到内孔边缘,包括:
24、将所述聚类调整值作为自适应加权系数,根据所述自适应加权系数,基于加权fcm模糊聚类算法对所述外孔区域内所有像素点进行自适应加权模糊聚类处理,得到内孔边缘。
25、进一步地,所述对所述内孔边缘进行缺陷检测得到检测结果,包括:
26、将所述内孔边缘和预设标准内孔边缘进行对比,得到所述内孔边缘的缺陷程度,将所述缺陷程度作为所述检测结果。
27、进一步地,所述确定所述待测像素点和所述外孔中心点的中心点距离,包括:
28、确定所述待测像素点与所有所述外孔中心点的最小距离值作为中心点距离。
29、进一步地,所述根据所述中心点距离确定所述待测像素点为内孔区域像素点的内孔概率,包括:
30、对所述中心点距离进行反比例的归一化处理,得到所述待测像素点为内孔区域像素点的内孔概率。
31、本发明具有如下有益效果:
32、本发明通过确定待测像素点和外孔中心点的中心点距离,能够基于中心点距离有效确定待测像素点属于内孔区域的内孔概率,通过中心点距离确定内孔概率,能够有效避免充电器因大小规格的差异导致的内孔概率计算错误的问题,提升内孔概率的准确性;通过待测像素点的特征向量均值和内孔概率确定待测像素点的初始边缘概率,由于结合了待测像素点的特征向量值和内孔概率,也即能够有效结合待测像素点特征向量值的分布情况和待测像素点所处位置信息,从而提升初始边缘概率的可靠性;通过待测像素点所处待测邻域的偏态系数和初始边缘概率确定待测像素点的目标边缘概率,进一步结合偏态分析确定待测像素点特征向量均值的偏移情况,从而准确确定待测像素点与其周围像素点所对应的纹理信息,进而能够根据偏态系数和初始边缘概率准确确定目标边缘概率,同时,为消除内孔边缘难以界定的影响,本发明通过确定聚类调整值,并对外孔区域内所有像素点进行聚类处理,从而能够对外孔区域中的像素点进行自适应的模糊聚类处理,有效确定模糊难以界定的内孔边缘,实现对内孔边缘的自适应提取,从而提升内孔边缘的提取效果,进而提升缺陷检测的准确性与可靠性。
技术特征:
1.一种用于铅酸蓄电池智能充电器的视觉缺陷检测方法,其特征在于,所述方法包括:
2.如权利要求1所述的一种用于铅酸蓄电池智能充电器的视觉缺陷检测方法,其特征在于,所述确定所述外孔区域中每个像素点的特征向量均值,包括:
3.如权利要求1所述的一种用于铅酸蓄电池智能充电器的视觉缺陷检测方法,其特征在于,所述根据所述待测像素点的特征向量均值和所述内孔概率确定所述待测像素点为内孔区域边缘像素点的初始边缘概率,包括:
4.如权利要求1所述的一种用于铅酸蓄电池智能充电器的视觉缺陷检测方法,其特征在于,所述根据所述待测邻域内所有像素点的特征向量均值确定所述待测邻域的偏态系数,包括:
5.如权利要求1所述的一种用于铅酸蓄电池智能充电器的视觉缺陷检测方法,其特征在于,所述根据所述待测邻域的偏态系数和所述初始边缘概率确定所述待测像素点的目标边缘概率,包括:
6.如权利要求1所述的一种用于铅酸蓄电池智能充电器的视觉缺陷检测方法,其特征在于,所述根据所述待测邻域内所有像素点的目标边缘概率确定所述待测像素点的聚类调整值,包括:
7.如权利要求1所述的一种用于铅酸蓄电池智能充电器的视觉缺陷检测方法,其特征在于,所述根据所述聚类调整值对所述外孔区域内所有像素点进行聚类处理得到内孔边缘,包括:
8.如权利要求1所述的一种用于铅酸蓄电池智能充电器的视觉缺陷检测方法,其特征在于,所述对所述内孔边缘进行缺陷检测得到检测结果,包括:
9.如权利要求1所述的一种用于铅酸蓄电池智能充电器的视觉缺陷检测方法,其特征在于,所述确定所述待测像素点和所述外孔中心点的中心点距离,包括:
10.如权利要求1所述的一种用于铅酸蓄电池智能充电器的视觉缺陷检测方法,其特征在于,所述根据所述中心点距离确定所述待测像素点为内孔区域像素点的内孔概率,包括:
技术总结
本发明涉及数字图像处理技术领域,具体涉及一种用于铅酸蓄电池智能充电器的视觉缺陷检测方法。该方法包括:获取充电口的灰度图像,确定外孔区域和外孔中心点,确定待测像素点和外孔中心点的中心点距离;根据中心点距离确定待测像素点的内孔概率,根据待测像素点的特征向量均值和内孔概率确定待测像素点的初始边缘概率;根据待测邻域内所有像素点的特征向量均值确定偏态系数,确定目标边缘概率;根据待测邻域内像素点的目标边缘概率确定聚类调整值;根据聚类调整值对外孔区域内所有像素点进行聚类处理得到内孔边缘,对内孔边缘进行缺陷检测得到检测结果。本发明能够有效提升缺陷检测的可靠性。
技术研发人员:徐鹏
受保护的技术使用者:飞杨电源技术(深圳)有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!