一种复杂异质环境下的交通参与者轨迹预测方法
本发明涉及轨迹预测领域,尤其是涉及一种复杂异质环境下的交通参与者轨迹预测方法。
背景技术:
1、随之智能汽车的发展和人们对方便且安全的出行方式的向往。智能汽车是目前交通运输工具的主要发展方向。为此,智能汽车在由行人、自行车和人驾驶汽车构成的复杂异质环境中行驶是不可避免的。而精确的交通参与轨迹预测是保证智能汽车规划安全可靠轨迹的保证。因此,研究一种运用于复杂异质环境中的轨迹预测方法是被迫切需要的。
2、现有的基于长短期神经网络或图卷积神经网络以及他们的改进方法都在研究社会互动对未来轨迹的影响。并且通过引入视场角的避障这经验的方式来考虑同类别交通参与之间的互动的非线性和非对称性,在行人数据集或者车辆数据集中取得了较好的效果。但是,他们在由行人、自行车和人驾驶汽车构成的复杂异质环境中表现不佳。因为他们忽略了不同类别参与者之间的差异性。比如:首先,在相同的交通环境下,由于不同交通参与者受到的社会约束不同,因此关注的交通信息不同。其次,由于不同交通参与者之间的动力学特性不同,使得不同交通参与者的运动能力不同和上下时刻之间的运动状态依赖也不一致。最后,不同交通参与者处理自身状态信息和交通信息的权重是不一致的。例如:行人更关心交通信息,因为行人具有灵活性的特点可以立即停下,相比自行车和汽车则不行。
3、但是,现有技术中未有能够个性化的考虑不同交通参与者的动力学特性、不同交通参与者的不同社会属性以及不同交通参与者处理环境信息差异化的特点的轨迹预测方法,无法进一步提高智能机器人在复杂异质环境中的预测精度。
技术实现思路
1、本发明的目的就是为了提供一种复杂异质环境下的交通参与者轨迹预测方法,考虑不同交通参与者的动力学特性、不同交通参与者的不同社会属性以及不同交通参与者处理环境信息差异化的特点,提高复杂异质环境下的轨迹预测精度。
2、本发明的目的可以通过以下技术方案来实现:
3、一种复杂异质环境下的交通参与者轨迹预测方法,包括以下步骤:
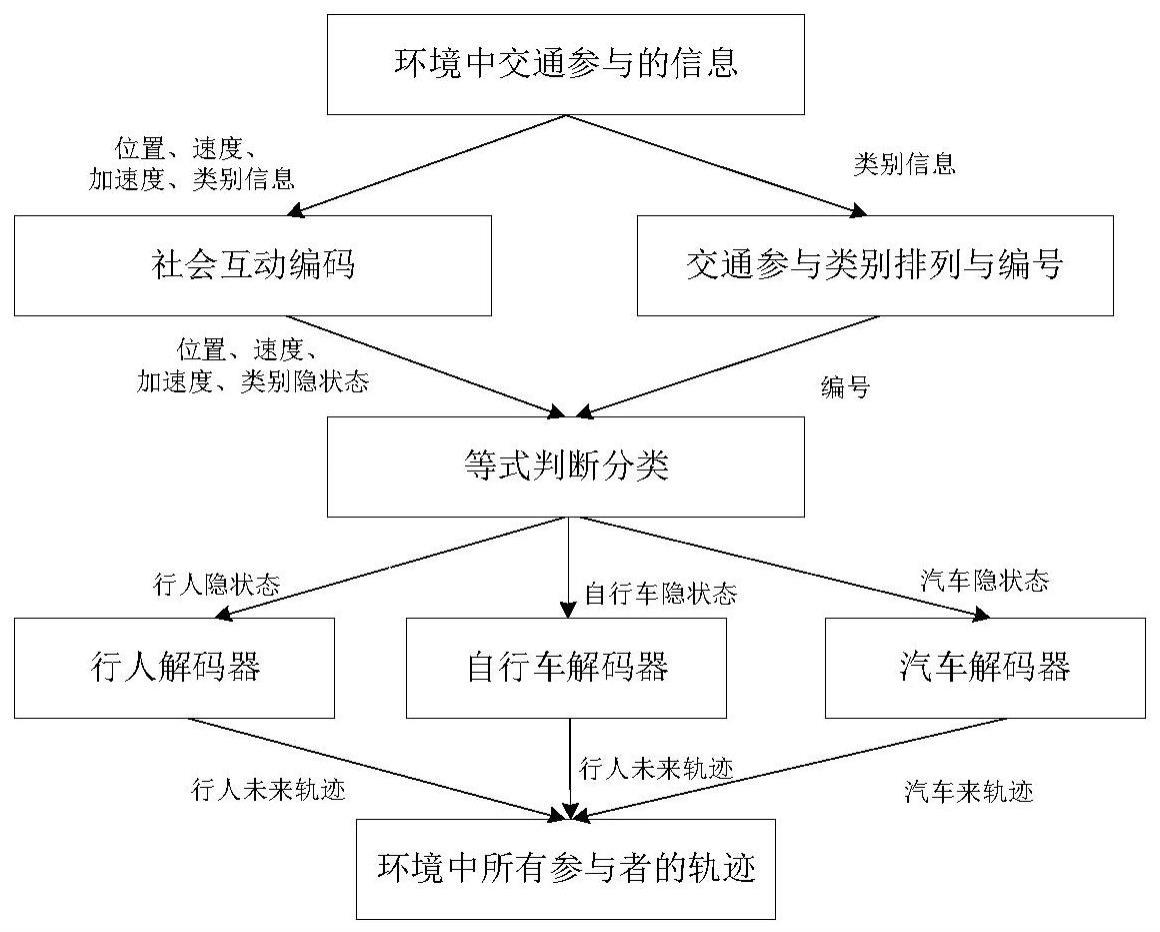
4、获取复杂异质环境下的交通参与者信息,所述交通参与者信息包括位置信息、速度信息、加速度信息和类别信息;
5、基于类别信息进行交通参与者类别排列并编号;
6、基于交通参与者信息分别构建引入专家经验的位置图、速度图、加速度图和类别图;
7、基于四个平行的空间关系捕捉网络与时间依赖关系捕捉网络分别对位置图、速度图、加速度图和类别图进行拓扑结构关系和时间依赖关系捕捉,得到位置隐状态、速度隐状态、加速度隐状态和类别隐状态;
8、基于编号,利用等式判断对位置隐状态、速度隐状态、加速度隐状态和类别隐状态进行分类,得到不同交通参与者的隐状态集合;
9、采用基于交通参与者类别的多模解码器分别解码不同交通参与者的隐状态,得到交通参与者的未来轨迹预测。
10、所述交通参与者的类别包括行人、自行车和汽车。
11、所述基于类别信息进行交通参与者类别排列并编号具体为:将类别信息按照顺序排列为一个类别序列,记作[c1,c2…ci…cn],ci代表第i个交通参与者的类别,ci=1代表第i个交通参与者为行人,ci=2代表第i个交通参与者为自行车,ci=3代表第i个交通参与者为汽车,n表示交通参与者数量;类别序列对应的编号为[1,2,…i…n]。
12、所述引入专家经验的类别图以交通参与者危险系数作为节点,以危险度作为边,在边中引入交通代理类别相关的专家经验修正系数,其中,所述交通参与者危险系数取决于交通参与者类别,所述危险度与交通参与者之间的相对距离大小和速度向量的夹角有关。
13、所述交通代理类别相关的专家经验修正系数为:
14、
15、其中,表示交通代理类别相关的专家经验修正系数,是交通参与者i的速度向量,表示交通参与者i与交通参与者j之间的相对位置向量。
16、所述类别图的构建方法为:
17、gc=(uc,ec)
18、
19、
20、其中,gc代表类别图;uc为类别图的节点,代表交通参与者危险系数,c∈[1,2,3]分别对应行人、自行车和汽车;ec为类别图的边,代表危险度;是交通参与者j的速度向量。
21、所述基于编号,利用等式判断对位置隐状态、速度隐状态、加速度隐状态和类别隐状态进行分类具体为:根据空间关系捕捉网络与时间依赖关系捕捉网络输出的位置隐状态排列、速度隐状态排列、加速度隐状态排列和类别隐状态排列,基于编号对排列的特征进行匹配,当不同排列中的编号相同时,即满足等式判断时,将相同编号的特征进行归类,依据类别隐状态信息划分行人隐状态集合、自行车隐状态集合和汽车隐状态集合。
22、所述空间关系捕捉网络采用图卷积神经网络。
23、所述时间依赖关系捕捉网络为时间卷积网络、长短期神经网络、循环式神经网络或门控神经网络。
24、所述多模解码器采用长短期神经网络、卷积神经网络、时间卷积网络、循环式神经网络或门控神经网络构建。
25、与现有技术相比,本发明具有以下有益效果:
26、(1)本发明采用多层有向图卷积神经网络来编码交通参与者之间的位置、速度、加速度以及周围邻居类别对社会互动的非线性关系,可以更细致化描述在多类别交通参与者构成的复杂异质环境中的社会互动,尤其是构建的类别图,它是表述不同邻居社会属性的关键,即危险度,可以为准确预测参与者未来避让不同类别交通参与者的未来轨迹提供必要信息。
27、(2)本发明采用的解码器是基于交通参与者类别的多模解码器,它是表达不同交通参与者对环境信息差异化处理的特性的关键。在相同的社会互动和环境信息下,由于不同交通参与者对多个环境信息的关注度以及多个社会互动的关注是不一致,本发明提出的多模解码器可以有效的表达不同交通参与者对信息的差异化处理,提高多类别交通参与者构成的复杂异质环境中的轨迹预计精度。
技术特征:
1.一种复杂异质环境下的交通参与者轨迹预测方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种复杂异质环境下的交通参与者轨迹预测方法,其特征在于,所述交通参与者的类别包括行人、自行车和汽车。
3.根据权利要求2所述的一种复杂异质环境下的交通参与者轨迹预测方法,其特征在于,所述基于类别信息进行交通参与者类别排列并编号具体为:将类别信息按照顺序排列为一个类别序列,记作[c1,c2…ci…cn],ci代表第i个交通参与者的类别,ci=1代表第i个交通参与者为行人,ci=2代表第i个交通参与者为自行车,ci=3代表第i个交通参与者为汽车,n表示交通参与者数量;类别序列对应的编号为[1,2,…i…n]。
4.根据权利要求2所述的一种复杂异质环境下的交通参与者轨迹预测方法,其特征在于,所述引入专家经验的类别图以交通参与者危险系数作为节点,以危险度作为边,在边中引入交通代理类别相关的专家经验修正系数,其中,所述交通参与者危险系数取决于交通参与者类别,所述危险度与交通参与者之间的相对距离大小和速度向量的夹角有关。
5.根据权利要求4所述的一种复杂异质环境下的交通参与者轨迹预测方法,其特征在于,所述交通代理类别相关的专家经验修正系数为:
6.根据权利要求5所述的一种复杂异质环境下的交通参与者轨迹预测方法,其特征在于,所述类别图的构建方法为:
7.根据权利要求1所述的一种复杂异质环境下的交通参与者轨迹预测方法,其特征在于,所述基于编号,利用等式判断对位置隐状态、速度隐状态、加速度隐状态和类别隐状态进行分类具体为:根据空间关系捕捉网络与时间依赖关系捕捉网络输出的位置隐状态排列、速度隐状态排列、加速度隐状态排列和类别隐状态排列,基于编号对排列的特征进行匹配,当不同排列中的编号相同时,即满足等式判断时,将相同编号的特征进行归类,依据类别隐状态信息划分行人隐状态集合、自行车隐状态集合和汽车隐状态集合。
8.根据权利要求1所述的一种复杂异质环境下的交通参与者轨迹预测方法,其特征在于,所述空间关系捕捉网络采用图卷积神经网络。
9.根据权利要求1所述的一种复杂异质环境下的交通参与者轨迹预测方法,其特征在于,所述时间依赖关系捕捉网络为时间卷积网络、长短期神经网络、循环式神经网络或门控神经网络。
10.根据权利要求1所述的一种复杂异质环境下的交通参与者轨迹预测方法,其特征在于,所述多模解码器采用长短期神经网络、卷积神经网络、时间卷积网络、循环式神经网络或门控神经网络构建。
技术总结
本发明涉及一种复杂异质环境下的交通参与者轨迹预测方法,包括以下步骤:获取复杂异质环境下的交通参与者信息;基于类别信息进行交通参与者类别排列并编号;分别构建引入专家经验的位置图、速度图、加速度图和类别图;分别对位置图、速度图、加速度图和类别图进行拓扑结构关系和时间依赖关系捕捉,得到位置隐状态、速度隐状态、加速度隐状态和类别隐状态;基于编号,利用等式判断对位置隐状态、速度隐状态、加速度隐状态和类别隐状态进行分类,得到不同交通参与者的隐状态集合;基于对应的解码器分别解码不同交通参与者的隐状态,得到交通参与者的未来轨迹预测。与现有技术相比,本发明具有在复杂异质环境下轨迹预测精度等优点。
技术研发人员:孟强,张琳,陈虹,余荣杰,洪金龙
受保护的技术使用者:同济大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!