一种路面激光线提取装置及方法与流程
本发明涉及路面测量工程,具体而言,涉及一种路面激光线提取装置及方法。
背景技术:
1、路面三维数据是众多公路网路面状态信息中重要参数之一。一方面,路面三维形态对交通安全影响巨大。如在国省公路上,大段高程交错起伏的路段,将给驾驶员的心理与生理带来极大压力,影响行车安全;在乡村公路上,大段公路存在路面三维缺陷(例如:车辙、坑槽、沉陷等)与路面起伏直接导致道路无法通行。另一方面,路面三维形态数据也能够用于基础设施数字化建模,为路面数字化三维重建提供数据支撑,进一步推进智能公路的实现。
2、现有的测量路面三维数据的方法是将激光器以线阵排列的方式安装在检测车上,在检测车以正常速度行驶时,对路面图像进行采集与存储,获取激光线路面图像。然后采用现代数字图像处理方法对激光线图像进行检测与识别,提取车辙激光线上的系列象素点,进而分析路面车辙的深度分布特征。该技术已广泛应用于高速公路路面车辙的检测过程中。在获取了激光图像序列后,为了精确测量路面三维高程信息,首先需要提取图像上路面反射的激光线条的中心峰值线,将光强和宽度均不统一的线条转化为宽度为单像素的线条,提取的准确性直接影响高程计算的精度。
3、现有的提取路面激光线的方法包括:首先对激光线图像进行灰度校正,获取图像暗部的平均灰度值作为背景灰度图,用原图减去背景图,得到校正结果图。在通过设定阈值的方法找到图像中最接近最大灰度值的目标象素,并对提取的象素点进行直线拟合,然后截取一个较小的确定为目标的区域。最后对分割图像进行细化处理,以便得到宽度为单象素的激光线图像。
4、现有技术中也有使用最小误差法进行图像分割,然后进行图像去噪,再利用b样条拟合重心法对保留下来的象素进行细化处理,最终得到激光线图像。
5、上述方法步骤中,面对斑马线、车道线等高灰度目标时,所采用的分割方法容易出现错误的分割结果,如把较亮的背景分割成目标,或把较暗的目标分割为背景。此外,在细化或拟合的过程中,简单的拟合算法对复杂走向的激光线效果不佳,最终得到的象素点不一定是真实的车辙激光线目标象素,这就使得检测的车辙精度出现较大程度的误差,直接影响车辙深度的计算,进而影响路面质量的最终评价。
技术实现思路
1、有鉴于此,本发明提供了一种路面线激光提取装置及方法,包括,步骤1,图像滤波步骤,具体包括:
2、步骤11:对采集的路面激光线图像进行归一化处理,使图像灰度值在0-255之间;
3、步骤12:采用宽度大于高度的矩形高斯平滑滤波器对归一化后的图像进行滤波;
4、步骤2,非负特征强度计算步骤,具体包括:
5、步骤21:以当前像素点为中心,采用的滑动窗口,将窗口中心与当前象素点重合,在滑动窗口覆盖的图像区域内,计算当前像素点与窗口内其它像素点的差异值;
6、步骤22:计算当前像素点的非负个数和非负强度值;
7、步骤23:对当前点的非负强度进行赋值,设定一个阈值th,若非负个数比值,则当前点的非负强度直接置为0,反之,则用平均非负强度值来赋值;
8、步骤24:重复以上过程,以像素为单位,从左到右,从上到下,在整幅图像上滑动窗口,计算每一个窗口所对应的当前像素点的非负特征强度值;
9、步骤25:将赋值后整图的非负特征强度值归一到0-255,得到一幅与原图大小一致的非负特征强度图;
10、步骤3,过零点快速提取步骤,具体包括,
11、步骤31:以当前像素点为中心,采用合适大小的滑动窗口,将窗口中心与当前像素点重合,在滑动窗口覆盖的图像区域内,计算当前像素点与窗口内其它像素点的差异值;
12、步骤32:计算当前像素点与窗口内其它像素点差异值之和,得到差分值
13、步骤33:找到各列各个像素的最大差分值与最小差分值多对应的行位置,计算两点间的几何中心,得到该列光条中心点行位置;
14、步骤34:重复以上过程,以像素为单位,从上到下,从左到右,在整幅图像上滑动窗口,找到每列光条中心点行位置。
15、其中,
16、所述阈值th为0.65。
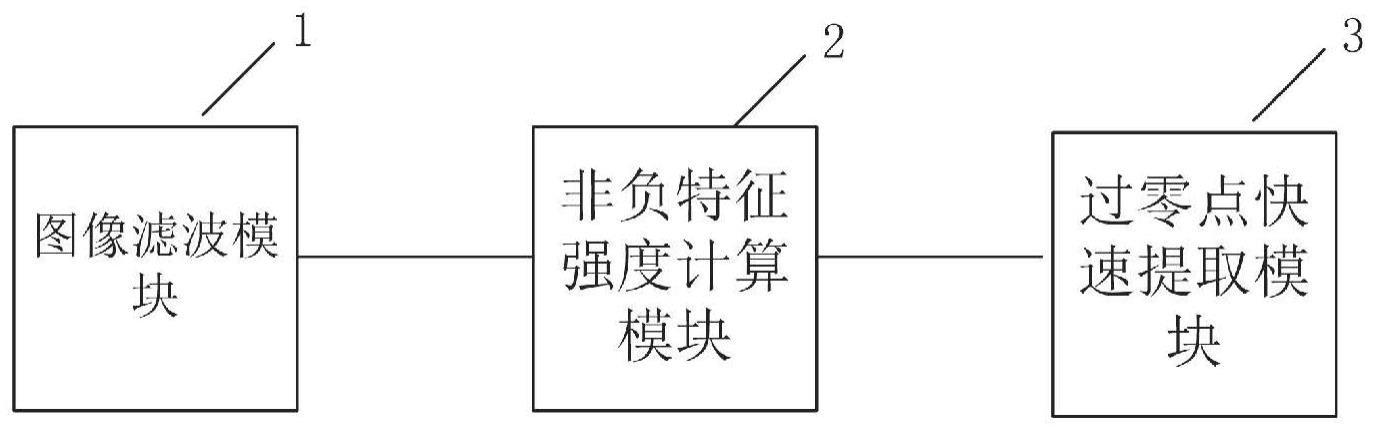
17、本发明进一步提供了一种路面线激光提取装置,包括:
18、图像滤波模块,用于,
19、对采集的路面激光线图像进行归一化处理,使图像灰度值在0-255之间;
20、采用宽度大于高度的矩形高斯平滑滤波器对归一化后的图像进行滤波;
21、非负特征强度计算模块,用于,
22、以当前像素点为中心,采用大小的滑动窗口,将窗口中心与当前像素点重合,在滑动窗口覆盖的图像区域内,计算当前像素点与窗口内其它像素点的差异值;
23、计算当前像素点的非负个数和非负强度值;
24、对当前点的非负强度进行赋值,设定一个阈值th,若非负个数比值,则当前点的非负强度直接置为0,反之,则用平均非负强度值来赋值;
25、重复以上过程,以像素为单位,从左到右,从上到下,在整幅图像上滑动窗口,计算每一个窗口所对应的当前像素点的非负特征强度值;
26、将赋值后整图的非负特征强度值归一到0-255,得到一幅与原图大小一致的非负特征强度图;
27、过零点快速提取模块,用于,
28、以当前像素点为中心,采用大小为3×3的滑动窗口,将窗口中心与当前像素点重合,在滑动窗口覆盖的图像区域内,计算当前像素点与窗口内其它像素点的差异值;
29、计算当前像素点与窗口内其它像素点差异值之和,得到差分值
30、找到各列各个像素的最大差分值与最小差分值多对应的行位置,计算两点间的几何中心,得到该列光条中心点行位置;
31、重复以上过程,以像素为单位,从上到下,从左到右,在整幅图像上滑动窗口,找到每列光条中心点行位置。
32、其中,
33、所述阈值th为0.65。
技术特征:
1.一种路面线激光提取方法,其特征在于,包括:
2.根据权利要求1所述的路面线激光提取方法,其特征在于:
3.一种路面线激光提取装置,其特征在于,包括:
4.根据权利要求3所述的路面线激光提取装置,其特征在于:
技术总结
本发明提供了一种路面线激光提取装置及方法,所述方法包括:图像滤波步骤,具体包括对采集的路面激光线图像进行归一化处理,使图像灰度值在0‑255之间;采用宽度大于高度的矩形高斯平滑滤波器对归一化后的图像进行滤波;步骤2,非负特征强度计算步骤,步骤3,过零点快速提取步骤。所述线激光提取方法能精确、自动、实时地提取激光线,具有很强的鲁棒性。而且检测识别精度可达像素级及更精细的亚像素级,这为后续的路面三维高程计算提供了精确的、可靠的数据和测量精度。
技术研发人员:荆根强,殷其昊,李孝兵,洪汉玉,罗营超
受保护的技术使用者:交通运输部公路科学研究所
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!