一种基于可靠性排序的条纹方向角快速解包方法
本发明属于图像处理,特别是一种基于可靠性排序的条纹方向角快速解包算法。
背景技术:
1、条纹方向包含着干涉条纹图的重要信息,是许多现有去噪算法和单帧解调技术的重要组成部分。条纹方向角一般通过条纹强度梯度获得,由于使用条纹强度梯度替代实际相位梯度求取方向角,导致方向角包裹在[-π/2,π/2]之间,方向图解包就是把包裹在[-π/2,π/2]之间的方向角还原成真实的指向图的过程。
2、为了很好的实现方向角解包运算,国内外学者已经提出了诸如正则化相位跟踪的解包方法,质量图引导的解包方法。上述两种算法都是基于先前解包的最可靠像素的解包算法,这一类算法归于连续路径算法。上述算法在处理大尺寸图像时受到连续路径的限制,解包时间长,无法满足单帧干涉图处理的实时性需求,因此,实有必要提供一种非连续路径的快速解包算法。
技术实现思路
1、本发明的目的在于针对上述现有技术存在的缺陷和不足,提供一种解包速度快,抗干扰能力强的方向图快速解包方法。
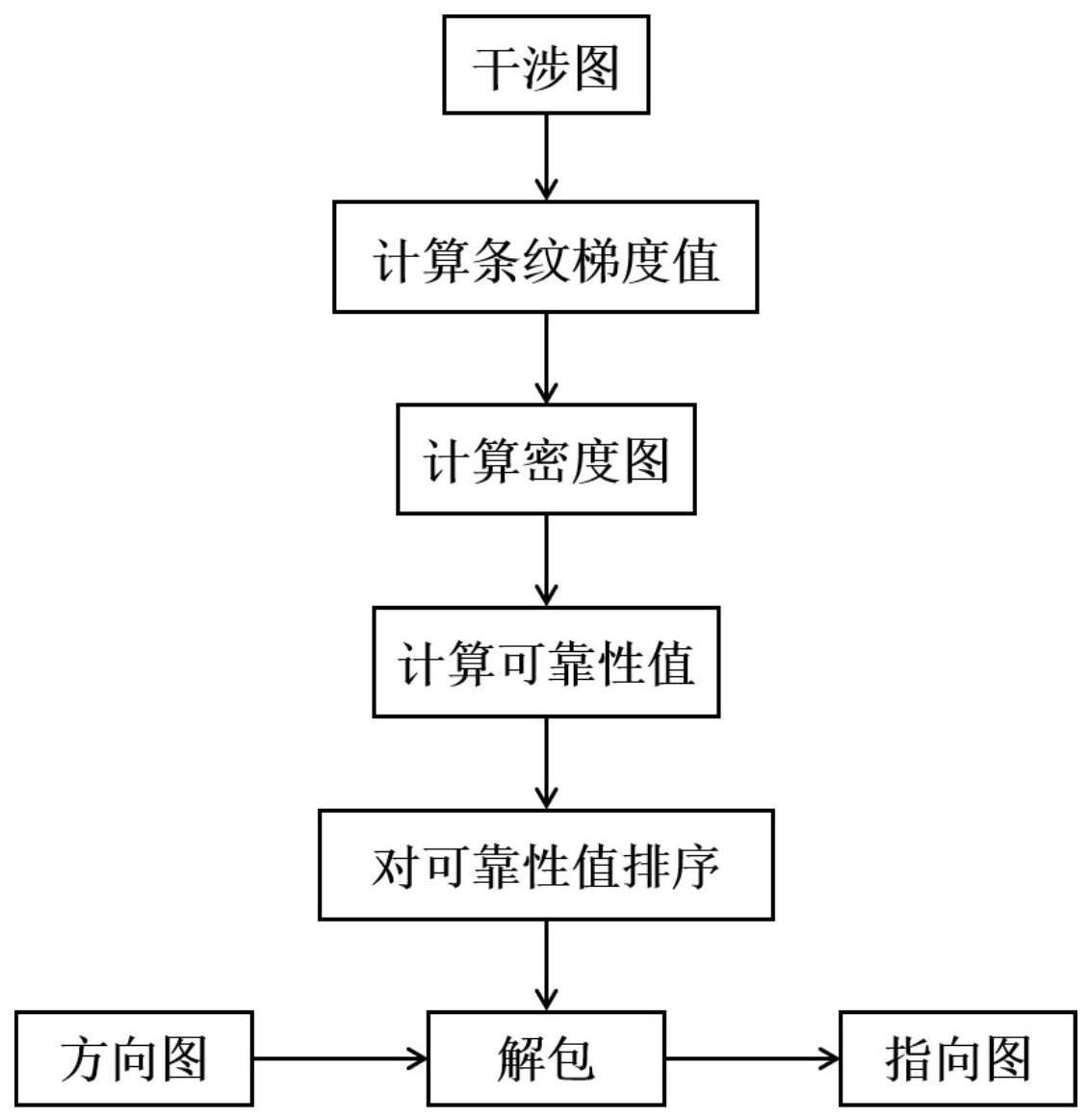
2、实现本发明目的的技术解决方案为:一方面,提供了一种基于可靠性排序的条纹方向角快速解包方法,包括以下步骤:
3、步骤1,计算干涉图条纹梯度值;
4、步骤2,根据条纹梯度值计算条纹密度图;
5、步骤3,利用条纹密度图计算垂直可靠性值和水平可靠性值;
6、步骤4,通过可靠性值位置引导其相邻两个像素点进行相对解包;
7、步骤5,重复执行步骤4直至解包结束,得到指向图。
8、进一步地,步骤1所述计算干涉图条纹梯度值,具体为:
9、计算干涉图像的水平梯度其中f(i,j)、f(i-1,j)分别为干涉图像在(i,j)、(i-1,j)位置处的像素值;
10、计算干涉图像的垂直梯度
11、进一步地,步骤2所述根据条纹梯度值计算条纹密度图,具体为:
12、
13、式中,dq(i,j)表示干涉图像在(i,j)位置处的条纹密度值,符号表示卷积运算符,kρ表示核大小为ρ的高斯滤波器。
14、进一步地,步骤3所述根据条纹密度图计算水平可靠性值和垂直可靠性值,具体为:
15、计算水平可靠性值eh:eh(i,j)=dq(i,j)+dq(i+1,j);
16、计算垂直可靠性值ev:ev(i,j)=dq(i,j)+dq(i,j+1);
17、式中,eh(i,j)表示干涉图像在(i,j)位置处的水平可靠性值,ev(i,j)表示图像在(i,j)位置处的垂直可靠性值,dq(i+1,j)表示干涉图像在(i+1,j)位置处的条纹密度值。
18、进一步地,步骤4所述通过可靠性值位置引导其相邻两个像素点进行相对解包,具体包括:
19、解包前所有像素点单独分组:查找可靠性值相邻的两个像素点a、b,假设a属于ga组、b属于gb组,计算两点方向角差值δβ,判断a、b分组是否相同,如果相同则跳过此可靠性值,否则判断cos(δβ)是否大于零,若大于零则令α=0,否则令α=1;
20、判断ga组元素数量是否大于gb组元素数量,若是,则gb组内所有方向角加上α×π并加入至ga组,否则ga组内所有方向角加上α×π并加入至gb组。
21、进一步地,步骤5所述重复执行步骤4直至解包结束,得到指向图,具体为:依次循环所有边缘值对全部方向角解包,并将解包结果包裹在[-π,π]之间,即为指向图。
22、进一步地,在步骤5执行之前,还包括执行:
23、对步骤3获得的可靠性值进行降序排列。
24、另一方面,提供了一种基于可靠性排序的条纹方向角快速解包系统,所述系统包括顺次执行的:
25、第一模块,用于计算干涉图条纹梯度值;
26、第二模块,用于根据条纹梯度值计算条纹密度图;
27、第三模块,用于利用条纹密度图计算垂直可靠性值和水平可靠性值;
28、第四模块,用于通过可靠性值位置引导其相邻两个像素点进行相对解包;
29、第五模块,用于重复运行第四模块直至解包结束,得到指向图。
30、进一步地,所述系统还包括在第四模块执行前的:
31、第六模块,用于对第三模块获得的可靠性值进行降序排列。
32、本发明与现有技术相比,其显著优点为:
33、1)先进行高质量的像素点相对展开,后进行低质量的像素点相对展开,避免了展开路径先经过低质量区域产生的传播误差。
34、2)该算法为非连续路径算法,减少了相对已展开像素点选取下一展开像素点的操作,降低了运算时间。
35、下面结合附图对本发明作进一步详细描述。
技术特征:
1.一种基于可靠性排序的条纹方向角快速解包方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于可靠性排序的条纹方向角快速解包方法,其特征在于,步骤1所述计算干涉图条纹梯度值,具体为:
3.根据权利要求2所述的基于可靠性排序的条纹方向角快速解包方法,其特征在于,步骤2所述根据条纹梯度值计算条纹密度图,具体为:
4.根据权利要求3所述的基于可靠性排序的条纹方向角快速解包方法,其特征在于,步骤3所述根据条纹密度图计算水平可靠性值和垂直可靠性值,具体为:
5.根据权利要求4所述的基于可靠性排序的条纹方向角快速解包方法,其特征在于,步骤4所述通过可靠性值位置引导其相邻两个像素点进行相对解包,具体包括:
6.根据权利要求5所述的基于可靠性排序的条纹方向角快速解包方法,其特征在于,步骤5所述重复执行步骤4直至解包结束,得到指向图,具体为:依次循环所有边缘值对全部方向角解包,并将解包结果包裹在[-π,π]之间,即为指向图。
7.根据权利要求5所述的基于可靠性排序的条纹方向角快速解包方法,其特征在于,在步骤5执行之前,还包括执行:
8.基于权利要求1至7任意一项所述方法的基于可靠性排序的条纹方向角快速解包系统,其特征在于,所述系统包括顺次执行的:
9.根据权利要求8所述的基于可靠性排序的条纹方向角快速解包系统,其特征在于,所述系统还包括在第四模块执行前的:
10.一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至7中任一项所述的方法。
技术总结
本发明公开了一种基于可靠性排序的条纹方向角快速解包方法,该方法包括:首先利用干涉图计算梯度,再计算密度图,由密度图计算可靠性值,对可靠性值进行排序,然后按照可靠性值大小顺序依次对其相邻的两个像素点方向角相对解包,以此得到指向图。本发明采用的展开路径为非连续路径,解决了传统算法在处理大尺寸图像时受到连续路径限制处理速度慢的问题。
技术研发人员:李建欣,李志宇
受保护的技术使用者:南京理工大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!