一种阻力扭转获得短跑时下肢关节间压力的智能方法
本发明涉及计算机,具体而言,涉及一种阻力扭转获得短跑时下肢关节间压力的智能方法。
背景技术:
1、短跑这项运动是在尽可能短的时间内跑完固定距离,将速度发挥到极致的一项运动,其主要的供能方式是无氧代谢,对运动员的体能要求很高,属于周期性速度力量型项目。从某种程度上讲,运动员的专项力量素质决定了运动水平的高低,它影响并促进其他素质,是短跑运动员掌握运动技能提高运动成绩的基础。
2、在短跑运动中,下肢力量是决定短跑运动成绩的体能要素之一,而提高下肢力量的常用手段主要是通过拖拉阻力跑,即在运动员的训练过程中对其施加拖拉阻力(即阻力扭转)。
3、同时,短跑是周期性的速度力量项目,其成绩很大程度上取决于专项技术的优化与专项力量的有效发展;目前,对拖拉阻力跑的相关研究主要集中在技术的运动学改变、负荷影响以及训练效果等方面;其缺陷在于,传统的拖拉阻力跑训练未对施加阻力扭转情况下运动员短跑过程中下肢关节间的压力进行过分析,其无法准确分析运动员在进行拖拉阻力跑训练时,相关肌群动力学改变情况与关节负荷变化,进而造成运动员运动损伤风险的提高和训练计划的失误。
技术实现思路
1、本发明提供一种阻力扭转获得短跑时下肢关节间压力的智能方法,以解决现有技术无法准确分析运动员在进行拖拉阻力跑训练时,相关肌群动力学改变情况与关节负荷变化,进而造成运动员运动损伤风险的提高和训练计划的失误的问题。
2、一种阻力扭转获得短跑时下肢关节间压力的智能方法,包括以下步骤:
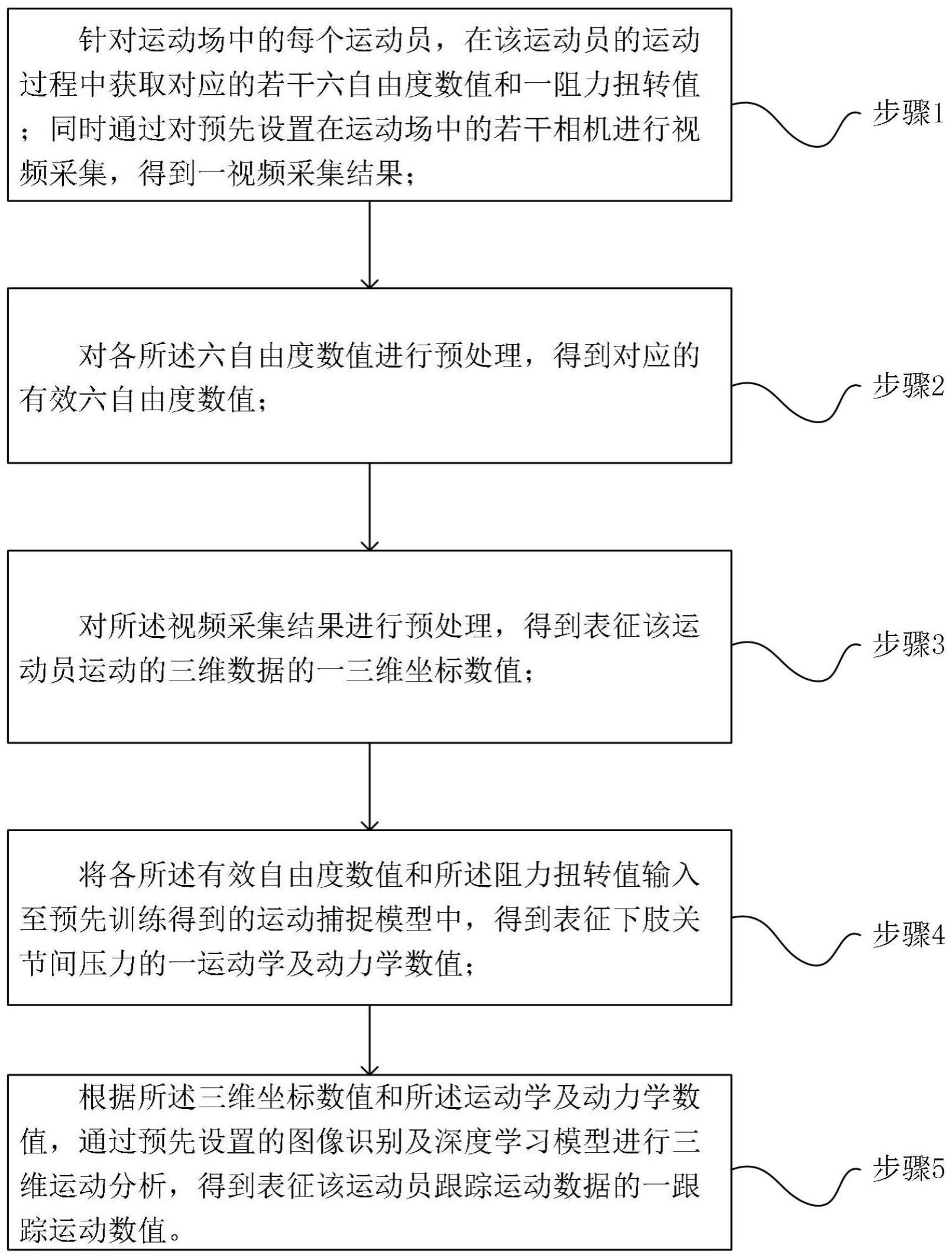
3、步骤1、针对运动场中的每个运动员,在该运动员的运动过程中获取对应的若干六自由度数值和一阻力扭转值;同时通过对预先设置在运动场中的若干相机进行视频采集,得到一视频采集结果;
4、步骤2、对各所述六自由度数值进行预处理,得到对应的有效六自由度数值;
5、步骤3、对所述视频采集结果进行预处理,得到表征该运动员运动的三维数据的一三维坐标数值;
6、步骤4、将各所述有效自由度数值和所述阻力扭转值输入至预先训练得到的运动捕捉模型中,得到表征下肢关节间压力的一运动学及动力学数值;
7、步骤5、根据所述三维坐标数值和所述运动学及动力学数值,通过预先设置的图像识别及深度学习模型进行三维运动分析,得到表征该运动员跟踪运动数据的一跟踪运动数值。
8、本发明方法的优点及有益效果:通过运动捕捉模型,获取下肢关节间压力的运动学及动力学数值,并将该数值和得到的三维坐标数值输入图像识别及深度学习模型中,进行三维运动分析,得到最终的跟踪运动数值;与现有技术相比,运动员在进行拖拉阻力跑训练时,可以通过跟踪运动数值的改变情况,了解到该运动员下肢关节间压力在运动过程中的波形变化,使得教练员可以进一步提高指导运动员进行运动训练的效果。
9、优选地,所述步骤2中,对各所述六自由度数值进行低通滤波,得到对应的所述有效六自由度数值。
10、优选地,所述步骤3包括:
11、步骤31、对所述视频采集结果进行解析,根据解析结果得到相同时序空间的若干画面;
12、步骤32、对各所述画面进行解析得到一解析结果;
13、步骤33、根据所述解析结果和所述有效六自由度数值,得到表征该运动员运动的三维数据的所述三维坐标数值。
14、优选地,所述步骤4包括:
15、步骤41、将各所述有效自由度数值和所述阻力扭转值输入至预先训练得到的所述运动捕捉模型中,得到一重力矩、一肌力矩、一环节角速度、一环节角速度以及一外力矩;
16、步骤42、根据所述重力矩、所述肌力矩、所述环节角速度、所述环节角加速度以及所述外力矩计算得到一关节净力矩;所述关节净力矩为所述运动学及动力学数值。
17、优选地,在执行完所述步骤41后还包括,根据所述环节角速度和所述环节角加速度,计算得到一惯性力矩。
18、优选地,所述步骤42中,根据所述重力矩、所述肌力矩、所述惯性力矩以及所述外力矩计算得到一所述关节净力矩;所述关节净力矩为所述运动学及动力学数值。
19、优选地,所述下肢关节包括髋关节、膝关节以及踝关节,在所述步骤4中,将各所述有效自由度数值和所述阻力扭转值输入至预先训练得到的运动捕捉模型中,得到表征所述髋关节、所述膝关节以及所述踝关节各关节间压力的一所述运动学及动力学数值。
20、优选地,所述相机为单目相机或双目相机,所述步骤1中,针对运动场中的每个运动员,在该运动员的运动过程中获取对应的若干所述六自由度数值和一所述阻力扭转值;同时通过对预先设置在所述运动场中的所述单目相机或所述双目相机进行视频采集,得到一所述视频采集结果。
技术特征:
1.一种阻力扭转获得短跑时下肢关节间压力的智能方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的阻力扭转获得短跑时下肢关节间压力的智能方法,其特征在于,所述步骤2中,对各所述六自由度数值进行低通滤波,得到对应的所述有效六自由度数值。
3.根据权利要求1所述的阻力扭转获得短跑时下肢关节间压力的智能方法,其特征在于,所述步骤3包括:
4.根据权利要求1所述的阻力扭转获得短跑时下肢关节间压力的智能方法,其特征在于,所述步骤4包括:
5.根据权利要求4所述的阻力扭转获得短跑时下肢关节间压力的智能方法,其特征在于,在执行完所述步骤41后还包括,根据所述环节角速度和所述环节加角速度,计算得到一惯性力矩。
6.根据权利要求5所述的阻力扭转获得短跑时下肢关节间压力的智能方法,其特征在于,所述步骤42中,根据所述重力矩、所述肌力矩、所述惯性力矩以及所述外力矩计算得到一所述关节净力矩;所述关节净力矩为所述运动学及动力学数值。
7.根据权利要求1所述的阻力扭转获得短跑时下肢关节间压力的智能方法,其特征在于,所述下肢关节包括髋关节、膝关节以及踝关节,在所述步骤4中,将各所述有效自由度数值和所述阻力扭转值输入至预先训练得到的运动捕捉模型中,得到表征所述髋关节、所述膝关节以及所述踝关节各关节间压力的一所述运动学及动力学数值。
8.根据权利要求1所述的阻力扭转获得短跑时下肢关节间压力的智能方法,其特征在于,所述相机为单目相机或双目相机,所述步骤1中,针对运动场中的每个运动员,在该运动员的运动过程中获取对应的若干所述六自由度数值和一所述阻力扭转值;同时通过对预先设置在所述运动场中的所述单目相机或所述双目相机进行视频采集,得到一所述视频采集结果。
技术总结
本发明涉及人体运动分析技术领域,具体而言,涉及一种阻力扭转获得短跑时下肢关节间压力的智能方法,包括以下步骤,步骤1、获取若干六自由度数值、阻力扭转值以及视频采集结果;步骤2、进行预处理,得到有效六自由度数值;步骤3、预处理得到三维坐标数值;步骤4、得到表征下肢关节间压力的运动学及动力学数值;步骤5、通过运动捕捉模型,获取下肢关节间压力的运动学及动力学数值,并进行三维运动分析,得到最终的跟踪运动数值;与现有技术相比,运动员在进行拖拉阻力跑训练时,可以通过跟踪运动数值的改变情况,了解到该运动员下肢关节间压力在运动过程中的波形变化,使得教练员可以进一步提高指导运动员进行运动训练的效果。
技术研发人员:邵恩泽,顾耀东,孙冬,梁敏君,童超益
受保护的技术使用者:宁波大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!