一种水下图像的目标检测方法、装置、设备及存储介质
本发明涉及水下图像处理领域,尤其是一种水下图像的目标检测方法、装置、设备及存储介质。
背景技术:
1、现有基于学习的水下目标检测算法是利用大量标注的水下目标图像数据,将图像中的目标进行标注和分类,通过模型训练结果和标注信息之间不断趋近,学习得到某一类目标的特征学习并且进行标注,从而达到目标检测的效果。
2、然而在水下环境中,由于水下介质、水下光照条件、水下海底环境等都要比地面环境复杂,不同波长光在水中的差异性衰减,水中浮游生物和悬浮粒子对光的散射,使得水下图像和视频中的目标模糊,且存在严重色差严重影响目标的特征,为水下目标的特征学习、识别理解造成严重障碍。现有的水下目标检测方案不能解决上述问题。
技术实现思路
1、有鉴于此,本发明实施例提供一种水下图像的目标检测方法、装置、设备及存储介质,用于提高水下图像目标的检测准确率。
2、本发明实施例的一方面提供了一种水下图像的目标检测方法,包括:
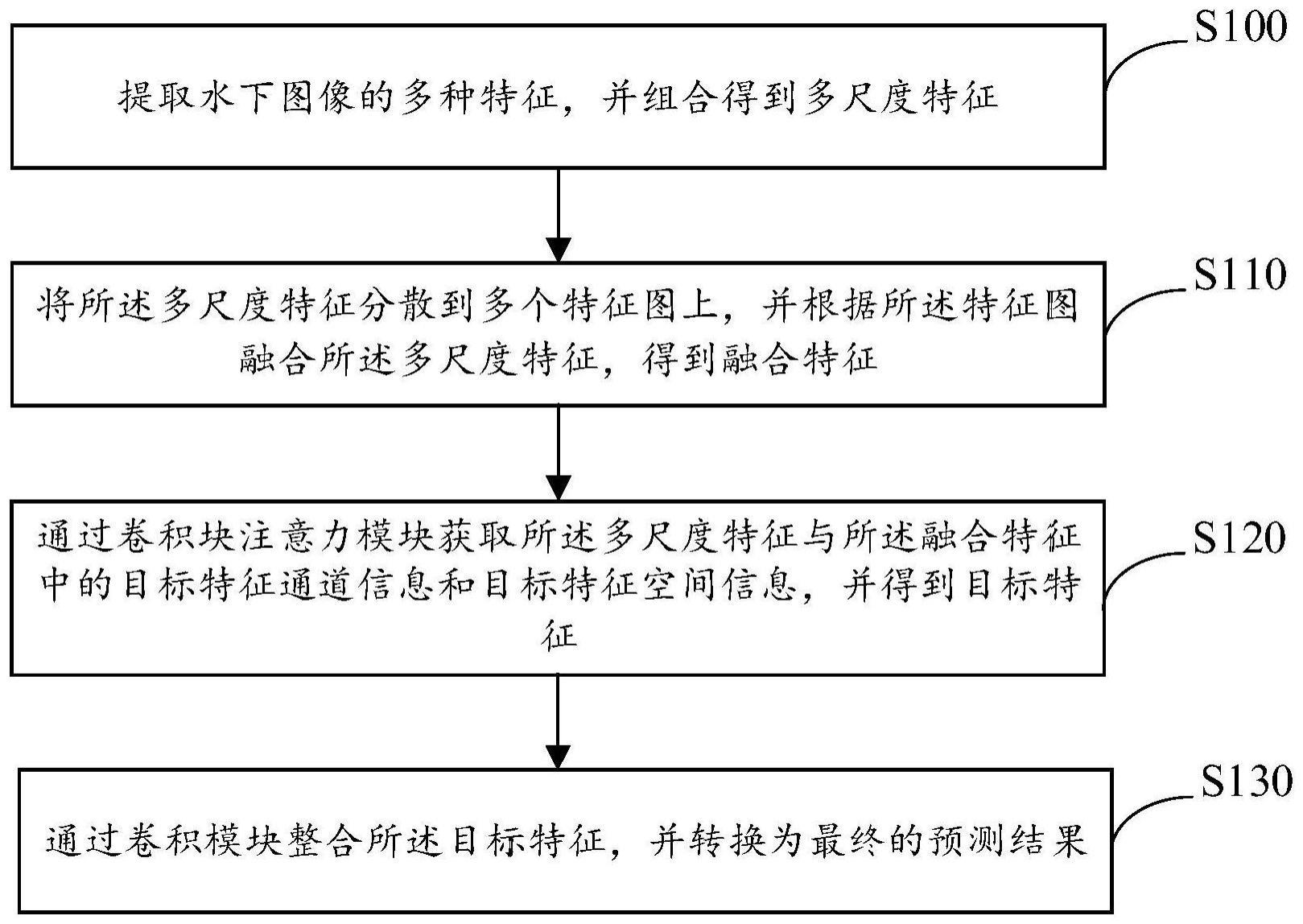
3、提取水下图像的多种特征,并组合得到多尺度特征;
4、将所述多尺度特征分散到多个特征图上,并根据所述特征图融合所述多尺度特征,得到融合特征;
5、通过卷积块注意力模块获取所述多尺度特征与所述融合特征中的目标特征通道信息和目标特征空间信息,并得到目标特征;
6、通过卷积模块整合所述目标特征,并转换为最终的预测结果。
7、可选地,所述提取水下图像的多种特征,并组合得到多尺度特征,包括:
8、提取水下图像的多种特征,所述多种特征包括纹理、颜色和形状中的至少之一;
9、将所述多种特征的感受野大小和中心步长进行多种方式的组合,得到多尺度特征。
10、可选地,所述将所述多种特征的感受野大小和中心步长进行多种方式的组合,得到多尺度特征,包括:
11、通过cbs模块卷积提取所述水下图像的多种特征,进行归一化操作并激活处理;
12、通过e-elan模块和mp模块交替提取经过卷积、归一化和激活处理后的多种特征,输出由不同感受野和不同中心步长组合的多尺度特征。
13、可选地,所述根据所述特征图融合所述多尺度特征,得到融合特征,包括:
14、通过特征金字塔和路径聚合网络将分散在所述特征图中的多尺度特征进行融合,得到融合特征。
15、可选地,所述通过卷积块注意力模块获取所述多尺度特征与所述融合特征中的目标特征通道信息和目标特征空间信息,并得到目标特征,包括:
16、通过卷积块注意力模块获取所述多尺度特征与所述融合特征中特征通道的权重信息和特征空间的权重信息;
17、根据所述特征通道的权重信息确定目标特征通道信息,根据所述特征空间的权重信息确定目标特征空间信息;
18、所述多尺度特征与所述融合特征、目标特征通道信息和目标特征空间信息相乘,得到目标特征。
19、可选地,所述通过卷积模块整合所述目标特征,包括:
20、分别将所述多尺度特征、所述特征金字塔提取并融合得到的第一融合特征,以及所述路径聚合网络提取并融合得到的第二融合特征进行卷积,以整合所述目标特征。
21、可选地,所述方法还包括:
22、通过跨阶段局部快速空间金字塔池化增加所述多种特征的感受野。
23、本发明实施例的另一方面还提供了一种水下图像的目标检测装置,包括:
24、特征提取单元,用于提取水下图像的多种特征,并组合得到多尺度特征;
25、特征融合单元,用于将所述多尺度特征分散到多个特征图上,并根据所述特征图融合所述多尺度特征,得到融合特征;
26、特征获取单元,用于通过卷积块注意力模块获取所述多尺度特征与所述融合特征中的目标特征通道信息和目标特征空间信息,并得到目标特征;
27、结果预测单元,用于通过卷积模块整合所述目标特征,并转换为最终的预测结果。
28、本发明实施例的另一方面还提供了一种电子设备,包括处理器以及存储器;
29、所述存储器用于存储程序;
30、所述处理器执行所述程序实现上述任一项所述的方法。
31、本发明实施例的另一方面还提供了一种计算机可读存储介质,所述存储介质存储有程序,所述程序被处理器执行实现上述任一项所述的方法。
32、本发明实施例还公开了一种计算机程序产品或计算机程序,该计算机程序产品或计算机程序包括计算机指令,该计算机指令存储在计算机可读存储介质中。计算机设备的处理器可以从计算机可读存储介质读取该计算机指令,处理器执行该计算机指令,使得该计算机设备执行前面的方法。
33、本发明先提取水下图像的多尺度特征,进而获取多尺度特征在通道及空间维度的信息,并据此减少了特征提取过程中的信息损失,提高了网络整体的特征提取能力,使得本发明在水下目标场景有更高的检测精度,可以在一定程度上解决了水下场景目标重叠、背景模糊复杂等问题给水下目标检测带来的困难。
技术特征:
1.一种水下图像的目标检测方法,其特征在于,包括:
2.根据权利要求1所述的一种水下图像的目标检测方法,其特征在于,所述提取水下图像的多种特征,并组合得到多尺度特征,包括:
3.根据权利要求2所述的一种水下图像的目标检测方法,其特征在于,所述将所述多种特征的感受野大小和中心步长进行多种方式的组合,得到多尺度特征,包括:
4.根据权利要求1所述的一种水下图像的目标检测方法,其特征在于,所述根据所述特征图融合所述多尺度特征,得到融合特征,包括:
5.根据权利要求1所述的一种水下图像的目标检测方法,其特征在于,所述通过卷积块注意力模块获取所述多尺度特征与所述融合特征中的目标特征通道信息和目标特征空间信息,并得到目标特征,包括:
6.根据权利要求4所述的一种水下图像的目标检测方法,其特征在于,所述通过卷积模块整合所述目标特征,包括:
7.根据权利要求2所述的一种水下图像的目标检测方法,其特征在于,所述方法还包括:
8.一种水下图像的目标检测装置,其特征在于,包括:
9.一种电子设备,其特征在于,包括处理器以及存储器;
10.一种计算机可读存储介质,其特征在于,所述存储介质存储有程序,所述程序被处理器执行实现如权利要求1至7中任一项所述的方法。
技术总结
本发明公开了一种水下图像的目标检测方法、装置、设备及存储介质,方法包括:提取水下图像的多种特征,并组合得到多尺度特征;将多尺度特征分散到多个特征图上,并根据特征图融合多尺度特征,得到融合特征;通过卷积块注意力模块获取多尺度特征与融合特征中的目标特征通道信息和目标特征空间信息,并得到目标特征;通过卷积模块整合目标特征,并转换为最终的预测结果。本发明可以提高水下图像目标的检测准确率,可广泛应用于水下图像处理领域。
技术研发人员:颜经辉,周壮,王腾辉,赵泽锋,唐佳林,赖韵婷,周俊涛,陈炯江,王振波,李智创,梁婉欣,刘辰晨
受保护的技术使用者:北京理工大学珠海学院
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!