一种旋转MFC层合板振动控制响应的仿真方法
本发明涉及多体系统动力学建模技术,具体涉及一种旋转mfc层合板振动控制响应的仿真方法。
背景技术:
1、直升机旋翼、太阳能帆板等旋转构件广泛存在于航空航天领域,这类柔性结构在经历大范围旋转运动时容易由外界激励引发结构振动问题,从而影响自身工作或导致失稳,对其进行动力学与振动控制研究变得尤为重要。压电纤维复合材料(macro fibercomposite,mfc)作为一种新型压电智能材料,有着柔韧性好,应变驱动斜率高等优点。将其作为驱动器能够有效的控制结构的振动响应。因此建立旋转mfc层合板动力学方程,并研究其振动控制响应具有重要意义。
2、罗威在《宏纤维复合结构的力学模型及对板壳结构振动的主动控制》中将mfc对结构的驱动效果等效为外力与外力矩,研究了mfc复合结构的振动控制模型,在对模型降阶后,完成了对平板与弧板的仿真分析与振动主动控制实验。但其所研究的对象为悬臂板,而当层合板作旋转运动时在离心力的影响下其力学特性将有所不同。hamed在《utilizingmacro fiber composite to control rotating blade vibrations》中利用mfc减轻了旋转叶片的非线性振动现象,结果表明在控制之前,由于分叉点的存在,叶片发生了严重的振动和突跳行为。在控制之后,由于分叉点的消失,叶片表现出稳定的运动状态。但其对mfc力电耦合特性的描述不够充分与精确。
技术实现思路
1、本发明提出了一种旋转mfc层合板振动控制响应的仿真方法。
2、解决本发明的技术方案为:一种旋转mfc层合板振动控制响应的仿真方法,包括以下步骤:
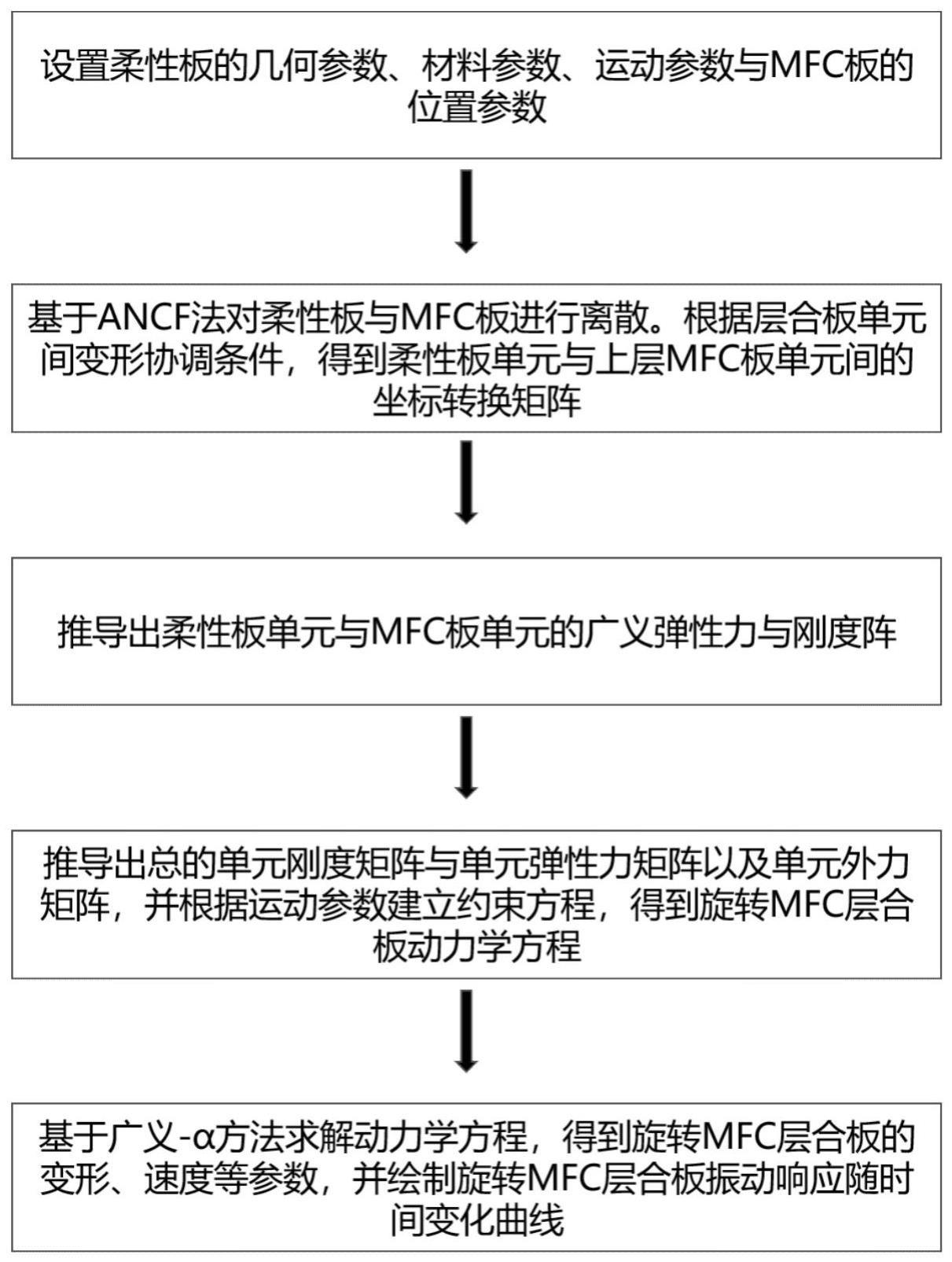
3、步骤1,建立旋转mfc层合板的物理模型,所述mfc层合板由柔性板与mfc板组成,其中mfc板位于柔性板上侧,设置柔性板的几何参数、材料参数和运动参数,以及mfc板的位置参数;
4、步骤2,对柔性板与mfc板进行单元离散,采用绝对节点坐标法描述柔性板与mfc板的运动与变形,结合层合板单元建模方法,得到柔性板单元与上层mfc板单元间的坐标转换矩阵;
5、步骤3,由柔性板单元弹性势能计算柔性板单元广义弹性力与刚度阵,引入mfc的本构方程以描述其力电耦合特性,并以此作为旋转mfc层合板中的驱动器,确定mfc板单元广义弹性力矩阵、广义刚度阵与广义压电力矩阵,根据pd控制策略求得控制电压参数;
6、步骤4,通过坐标转换矩阵得到mfc层合板单元的单元质量矩阵、刚度矩阵与外力矩阵,将mfc层合板单元进行组装,结合约束方程,得到旋转mfc层合板动力学方程;
7、步骤5,基于广义-α方法求解旋转mfc层合板动力学方程,计算mfc层合板的绝对节点坐标,得到旋转mfc层合板的变形、速度。
8、一种旋转mfc层合板振动控制响应的仿真系统,用于实施所述的旋转mfc层合板振动控制响应的仿真方法,实现旋转mfc层合板振动控制响应的仿真。
9、一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时,实施所述的旋转mfc层合板振动控制响应的仿真方法,实现旋转mfc层合板振动控制响应的仿真。
10、一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时,实施所述的旋转mfc层合板振动控制响应的仿真方法,实现旋转mfc层合板振动控制响应的仿真。
11、本发明与现有技术相比,其显著优点:(1)采用绝对节点坐标法对柔性板进行离散,可以更准确的描述板单元的变形与运动,建立的方程具有常数质量矩阵,不存在科氏力和离心力。(2)采用的层合板单元建模方法为分层模型,在耦合条件充分,保持层合板单元建模精度的同时,减少了一半的层合板单元节点坐标数量,提高了计算效率,且可以直接描述mfc的力电耦合特性而不是将其等效为一作用力。
技术特征:
1.一种旋转mfc层合板振动控制响应的仿真方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种旋转mfc层合板振动控制响应的仿真方法,其特征在于,步骤1,设置柔性板的几何参数、材料参数和运动参数,以及mfc板的位置参数,具体方法为:
3.根据权利要求1所述的一种旋转mfc层合板振动控制响应的仿真方法,其特征在于,步骤2,对柔性板与mfc板进行单元离散,采用绝对节点坐标法描述柔性板与mfc板的运动与变形,结合层合板单元建模方法,得到柔性板单元与上层mfc板单元间的坐标转换矩阵,具体方法为:
4.根据权利要求1所述的一种旋转mfc层合板振动控制响应的仿真方法,其特征在于,步骤3,由柔性板单元弹性势能计算柔性板单元广义弹性力与刚度阵,引入mfc的本构方程以描述其力电耦合特性,并以此作为旋转mfc层合板中的驱动器,确定mfc板单元广义弹性力矩阵、广义刚度阵与广义压电力矩阵,根据pd控制策略求得控制电压参数,具体方法为:
5.根据权利要求1所述的一种旋转mfc层合板振动控制响应的仿真方法,其特征在于,步骤4,通过坐标转换矩阵得到mfc层合板单元的单元质量矩阵、刚度矩阵与外力矩阵,将mfc层合板单元进行组装,结合约束方程,得到旋转mfc层合板动力学方程,具体方法为:
6.一种旋转mfc层合板振动控制响应的仿真系统,用于实施权利要求1-5任一项所述的旋转mfc层合板振动控制响应的仿真方法,实现旋转mfc层合板振动控制响应的仿真。
7.一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时,实施权利要求1-5任一项所述的旋转mfc层合板振动控制响应的仿真方法,实现旋转mfc层合板振动控制响应的仿真。
8.一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时,实施权利要求1-5任一项所述的旋转mfc层合板振动控制响应的仿真方法,实现旋转mfc层合板振动控制响应的仿真。
技术总结
本发明公开了一种旋转MFC层合板振动控制响应的仿真方法,对柔性板与MFC板进行单元离散,采用绝对节点坐标法描述柔性板与MFC板的运动与变形,结合层合板单元建模方法,得到柔性板单元与上层MFC板单元间的坐标转换矩阵;由柔性板单元弹性势能计算柔性板单元广义弹性力与刚度阵,引入MFC的本构方程描述其力电耦合特性,确定MFC板单元广义弹性力矩阵、广义刚度阵与广义压电力矩阵,根据PD控制策略求得控制电压参数;确定MFC层合板单元的单元质量矩阵、刚度矩阵与外力矩阵,将MFC层合板单元进行组装,得到旋转MFC层合板动力学方程,基于广义‑α方法求解MFC层合板的绝对节点坐标,得到旋转MFC层合板的变形、速度。
技术研发人员:黎亮,余运鑫,章定国,郭永彬,郭晛
受保护的技术使用者:南京理工大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!