一种建筑钢结构焊缝定位的方法与流程
本发明涉及建筑钢结焊接相关领域,具体为一种建筑钢结构焊缝定位的方法。
背景技术:
1、现有智能机器人建筑钢结构焊接行业内常用的定位方法是:结构设计工程师拆解构建3d模型,找到与构建对应的3d模型,先将构件的3d模型导入视觉系统,人工修改拍照位置和拍照顺序,然后启动整套系统开始焊接工作。整体流程繁琐,耗时。实际使用率非常低。不具备商业推广前途和大批量落地实施部署的可能,针对上述的一些问题,设计了一种建筑钢结构焊缝定位的方法。
技术实现思路
1、本发明的目的在于提供一种建筑钢结构焊缝定位的方法,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:一种建筑钢结构焊缝定位的方法,包括以下步骤:
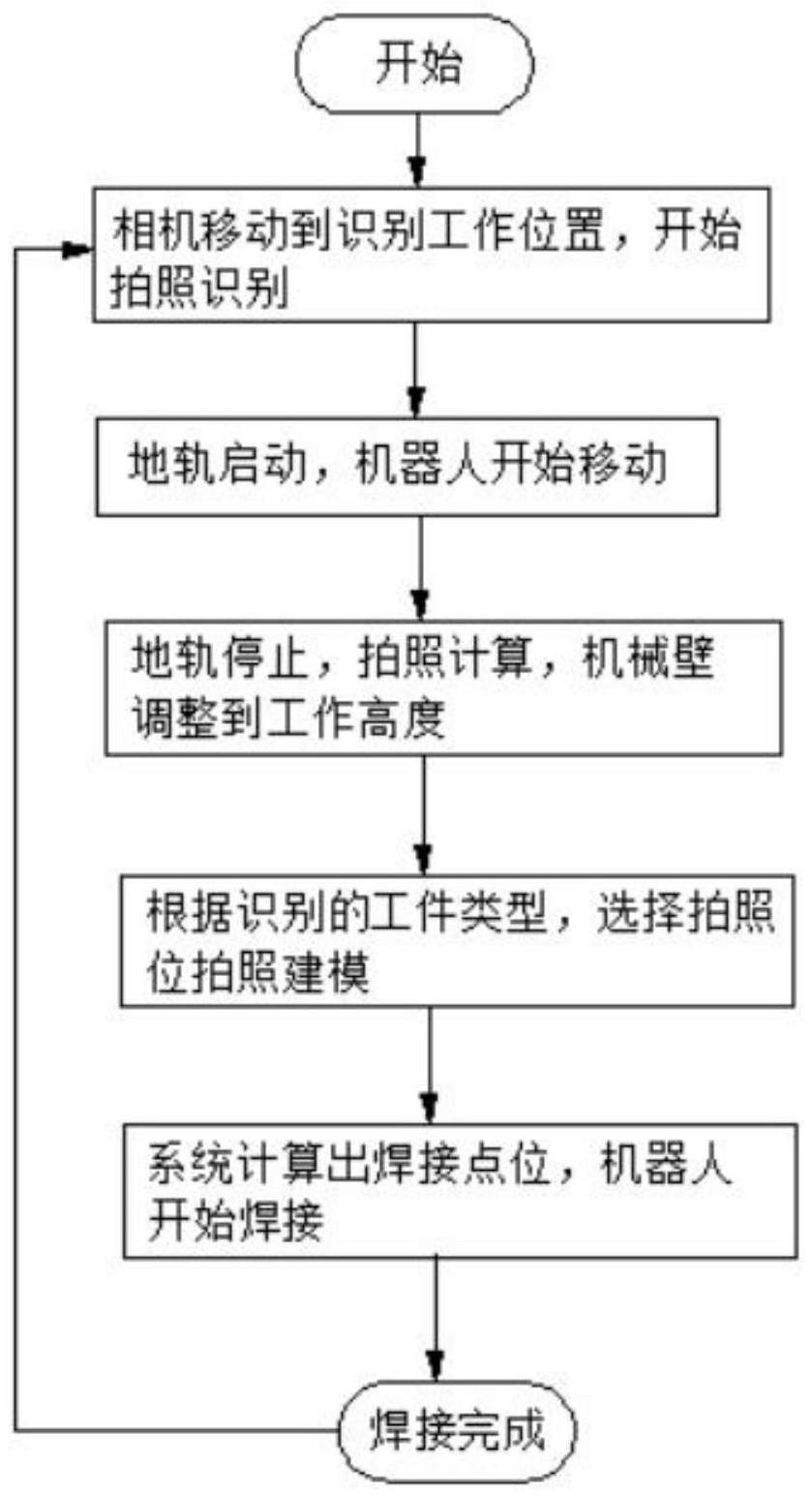
3、步骤s1、将焊接机器人调整到识别姿态,同时使焊接机器人在设置好的地轨上进行运动,并让焊接机器人上的2d相机进行连续拍摄;
4、步骤s2、将2d相机实时接收的图像输入基于深度学习的零部件检测模型得到检测结果,当检测到需要焊接的零部件时,地轨停止移动;
5、步骤s3、机器人保持在识别姿态,3d相机对待焊接零部件进行拍照,上位机收到3d点云计算出需要调整的高度,机器人根据反馈将焊枪调整到距离待焊接零部件正上方500mm处;
6、步骤s4、根据识别出的零部件类型,上位机向机器人发送拍照位置,机器人移动机械臂依次到收到的拍照位进行3d拍照;
7、步骤s5、上位机收到的3d点云,将同组拍照位置的点云通过配准算法进行拼接,构建出待焊接工件的完整3d模型,根据工件类型调用对应的算法;
8、步骤s6、机器人根据收到的焊缝点位及焊接工艺,调用内存中对应的焊接工艺设置,走点焊接;
9、步骤s7、完成焊接后,返回步骤s1。
10、优选的,所述步骤s1中2d相机位于待焊接工件的正上方,能完整俯拍正前方工件移动区域。
11、优选的,所述步骤s2中零部件检测模型识别到工字钢整体,得到其在图像中的像素宽度以及像素坐标,并将工字钢分为下述几个分类:将长度小于工字钢三分之二宽度的板材划分为小板;通过判断小板中心点与工字钢中心点的坐标将小板进一步划分为内侧小板和外侧小板;其余的板材划分为筋板端板,其中中心坐标靠近工字钢两侧的板材划分为端板,通过判断端板在工字钢的哪一侧又可将其划分为左右端板,剩余的板材则划分为筋板。
12、优选的,所述步骤s5中运用随机采样一致性算法拟合焊缝相邻的面,通过以下步骤来拟合平面:
13、步骤a、从源点云数据集合p={pi|i=1,2,3,......,n}中随机采样三个不共线的内点,作为假设的内点,其平面模型方程式为:
14、ax+by+cz+d=0
15、步骤b、遍历点集p,计算pi(xi,yi,zi)到此平面的距离di,其中di的计算公式为:
16、
17、步骤c、设定距离阈值t,当di小于t时,将pi设为内点,否则将pi设为外点,遍历完点集p后,记录下当前平面模型方程式以及对应的内点数量m;
18、步骤d、重复步骤a到步骤c,每次迭代选取对应内点数量最多的平面模型方程式作为当前最佳平面模型方程式,重复步骤a到步骤c的k(k为人为设置的迭代次数)次后得到的最佳平面模型方程式即为我们所需要的最佳拟合平面,已知两个平面表达式:
19、a1x+b1y+c1z+d1=0 (1)
20、a2x+b2y+c2z+d2=0 (2)
21、将法向量叉乘即可得相交直线的向量表达式:n=(u,v,w);
22、其中m=b1c2-b2c1,n=a2c1-c2a1,p=a1b2-a2b1;
23、当w不为0时,令公式(1)和(2)中z=0得到:
24、a1x+b1y+d1=0 (3)
25、a2x+b2y+d2=0 (4)
26、求解方程组(3),(4)得到交线上一点q(x0,y0,z0);
27、同理当u或v不为零时,另公式(1),(2)的x或y等于0,求解方程组得到交线上一点q(x0,y0,z0)。则平面(1)与平面(2)的交线l1的参数方程为:
28、
29、遍历点集p,过点pi(xi,yi,zi)且与l1垂直的平面方程为:ux+vy+wz+d0=0(6),其中0=-(u x 0+v y 0+w z 0);
30、将公式(5)带入公式(6)求解得到t i,则点p i在交线l1上的投影坐标为(x 0+u t0,y 0+v t 0,z 0+w t 0);
31、步骤e、通过上述步骤将点云投影到直线,得到焊缝直线的模型,模型最两侧点即为所需的焊接点位,并根据焊缝朝向选择相应的焊接工艺编号,上位机将焊接点位及焊接工艺编号发送到机器人。
32、与现有技术相比,本发明的有益效果是:本发明通过上位机收到的3d点云,将同组拍照位置的点云通过配准算法进行拼接,构建出待焊接工件的完整3d模型,根据工件类型调用对应的算法,机器人根据收到的焊缝点位及焊接工艺,调用内存中对应的焊接工艺设置,走点焊接,从而完全省略了当前建筑钢结构智能焊接行业内需要tekla模型或者其他3d模型导入的现状,大幅度节省了人力,简化了流程,增加了智能焊接机器人的使用率。
技术特征:
1.一种建筑钢结构焊缝定位的方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种建筑钢结构焊缝定位的方法,其特征在于:所述步骤s1中2d相机位于待焊接工件的正上方,能完整俯拍正前方工件移动区域。
3.根据权利要求1所述的一种建筑钢结构焊缝定位的方法,其特征在于:所述步骤s2中零部件检测模型识别到工字钢整体,得到其在图像中的像素宽度以及像素坐标,并将工字钢分为下述几个分类:将长度小于工字钢三分之二宽度的板材划分为小板;通过判断小板中心点与工字钢中心点的坐标将小板进一步划分为内侧小板和外侧小板;其余的板材划分为筋板端板,其中中心坐标靠近工字钢两侧的板材划分为端板,通过判断端板在工字钢的哪一侧又可将其划分为左右端板,剩余的板材则划分为筋板。
4.根据权利要求1所述的一种建筑钢结构焊缝定位的方法,其特征在于:所述步骤s5中运用随机采样一致性算法拟合焊缝相邻的面,通过以下步骤来拟合平面:
技术总结
本发明涉及建筑钢结焊接相关领域,具体为一种建筑钢结构焊缝定位的方法,本发明通过上位机收到的3D点云,将同组拍照位置的点云通过配准算法进行拼接,构建出待焊接工件的完整3D模型,根据工件类型调用对应的算法,机器人根据收到的焊缝点位及焊接工艺,调用内存中对应的焊接工艺设置,走点焊接,从而完全省略了当前建筑钢结构智能焊接行业内需要Tekla模型或者其他3D模型导入的现状,大幅度节省了人力,简化了流程,增加了智能焊接机器人的使用率。
技术研发人员:王德钊,李维钧
受保护的技术使用者:上海昇视唯盛科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!