指针型仪表读数方法、装置和存储介质与流程
本申请涉及电力系统的巡检技术,尤指一种指针型仪表读数方法、装置和存储介质。
背景技术:
1、变电所是发电、输电和配电系统的一部分,能将电压从高电压转换为低电压或反向转换,也可执行其他重要输电及配电功能。变电所的主要功用为利用变压器将电压改变,其次亦能将为电网作功率因数补偿、电力系统保护等。因此,变电所的安全运行关系重大,不仅关系到输配电的安全,并且当发生故障的时候有可能存在重大安全隐患。
2、对变电所中的仪器仪表进行巡检是消除隐患的必要措施。在早年,变电所通常皆需要人工到现场巡检,通过工人手持检测设备来进行巡检作业,来采集设备的运行数据,控制设备运行或修复故障。虽然现在随着自动化技术的发展,很多仪器仪表已经可以进行自动监测的,然而变电所中仍然有很多仪器仪表是指针型仪表,有必要采用人工巡检的方式进行读数,以确保安全。随着变电所的数量和规模不断增加,人工巡检的内容越来越复杂,导致人工巡检的质量和检测的及时性大大降低,日益增长的变电所的数量与巡检人员数量不足之间的矛盾日益凸显。同时,人工巡检作业的质量有很大的随机性,与工作人员的经验多少、责任心强弱、精神情况等多个因素有关,常常导致误检、漏检等情况的情况发生,而产生事故。人工巡检具有劳动强度大、工作效率低、管理成本高等缺点。
技术实现思路
1、本申请提供了一种指针型仪表读数方法、装置和存储介质,可以减少变电所的人工巡检工作。
2、为了达到上述目的,本申请实施例提供了一种指针型仪表读数方法。该方法包括:
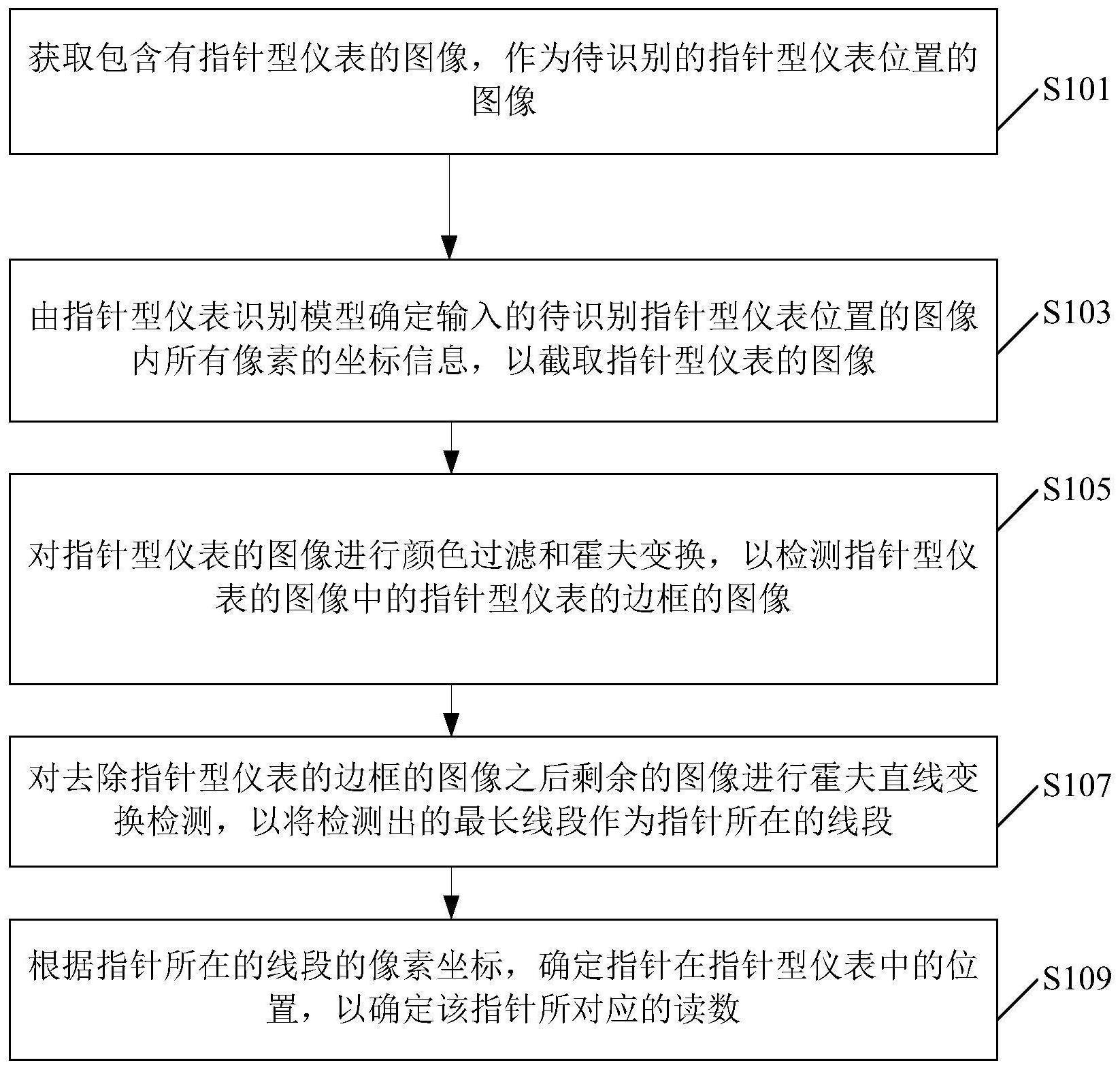
3、获取包含有指针型仪表的图像,作为待识别的指针型仪表位置的图像;
4、由指针型仪表识别模型确定输入的待识别指针型仪表位置的图像内所有像素的坐标信息,以截取指针型仪表的图像;
5、对指针型仪表的图像进行颜色过滤和霍夫变换,以检测指针型仪表的图像中的指针型仪表的边框的图像;
6、对去除指针型仪表的边框的图像之后剩余的图像进行霍夫直线变换检测,以将检测出的最长线段作为指针所在的线段;
7、根据指针所在的线段的像素坐标,确定指针在指针型仪表中的位置,以确定该指针所对应的读数。
8、与相关技术相比,本申请实施例中包括获取包含有指针型仪表的图像,然后从中截取指针型仪表的图像,并且对该图像进行颜色过滤和霍夫变换,以检测指针型仪表的图像中的指针型仪表的边框的图像,再对去除指针型仪表的边框的图像之后剩余的图像进行霍夫直线变换检测,以将检测出的最长线段作为指针所在的线段,从而最终确定指针所对应的读数。通过上述方案,可以从拍摄的图像中识别出其中的指针型仪表的读数,减少人工专门为了读取指针型仪表的读数而在变电所进行巡检工作。
9、在一种示例性的实施例中,对指针型仪表的图像进行颜色过滤和霍夫变换,以检测指针型仪表的图像中的指针型仪表的边框的图像的步骤,包括:
10、对作为指针型仪表的图像的bgr三通道的彩色图像值进行hsv颜色空间转换;
11、根据指针型仪表的图像的hsv颜色空间的数值,获得在指针型仪表的图像中特定颜色部分的图像;
12、检测特定颜色部分的图像中的边框的图像。
13、在一种示例性的实施例中,对指针型仪表的图像进行颜色过滤和霍夫变换,以检测指针型仪表的图像中的指针型仪表的边框的图像的步骤,包括:
14、通过灰度转换和二值化处理,将指针型仪表的图像转换成黑白图像;
15、检测黑白图像中的边框的图像。
16、在一种示例性的实施例中,在由指针型仪表识别模型确定输入的待识别指针型仪表位置的图像内所有像素的坐标信息,以截取指针型仪表的图像的步骤之后,并且在对指针型仪表的图像进行颜色过滤和霍夫变换的步骤之前,该方法还包括:
17、以目标形状的基准位置坐标作为参考,根据指针型仪表的图像的坐标对指针型仪表的图像进行水平变换以及透视变换,并且将经过水平变换以及透视变换的图像作为指针型仪表的图像。
18、在一种示例性的实施例中,以目标形状的基准位置坐标作为参考,根据指针型仪表的图像的基准位置的坐标对指针型仪表的图像进行水平变换以及透视变换,并且将经过水平变换以及透视变换的图像作为指针型仪表的图像的步骤,包括:
19、将指针型仪表的图像中的基准位置之中的位于同一侧的两个基准位置的坐标的距离与位于另一侧的两个基准位置的坐标的距离进行减法计算:
20、如果通过减法计算出的距离与其中距离较短一侧的两个坐标的距离的比值大于预设阈值,则以目标形状的基准位置坐标作为参考,根据指针型仪表的图像的基准位置的坐标对指针型仪表的图像进行水平变换以及透视变换,并且将经过水平变换以及透视变换的图像作为指针型仪表的图像。
21、在一种示例性的实施例中,在将待识别指针型仪表位置的图像输入到指针型仪表识别模型的步骤之前,该方法还包括:
22、对指针型仪表的图像数据进行标记;其中,标记的指针型仪表的图像数据分类成训练集和测试集;
23、对训练集中的数据进行数据增强,以形成经过数据增强的训练集;
24、通过神经网络采用经过数据增强的训练集训练指针型仪表识别模型;
25、采用测试集评估与校正指针型仪表识别模型的指标性能。
26、在一种示例性的实施例中,指针型仪表的轮廓为圆形或者矩形,并且当指针型仪表的轮廓为矩形时,指针型仪表中的指针是转动式的或者是水平移动式的;
27、当指针型仪表的轮廓为圆形的时候,指针型仪表识别模型是圆形指针型仪表识别模型;
28、当指针型仪表的轮廓为矩形的时候,指针型仪表识别模型是矩形指针型仪表识别模型;
29、当指针型仪表的轮廓为圆形的时候,或者当指针型仪表的轮廓为矩形并且指针是转动式的时候,根据指针所在的线段的像素坐标,确定指针在指针型仪表中的位置,以确定该指针所对应的读数的步骤,包括:
30、根据指针在指针型仪表中的位置、指针型仪表的起始刻度的位置以及最大刻度的位置,确定指针的转动角度;
31、根据指针的转动角度以及指针型仪表的量程,确定指针所对应的读数;
32、当指针型仪表的轮廓为矩形并且指针是水平移动式的时候,根据指针所在的线段的像素坐标,确定指针在指针型仪表中的位置,以确定该指针所对应的读数的步骤,包括:
33、根据指针在指针型仪表中的位置、指针型仪表的起始刻度以及最大刻度,确定指针的水平移动距离;
34、根据指针的水平移动距离以及指针型仪表的量程,确定指针所对应的读数。
35、本申请的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本申请而了解。本申请的其他优点可通过在说明书以及附图中所描述的方案来实现和获得。
技术特征:
1.一种指针型仪表读数方法,其特征在于,包括:
2.根据权利要求1所述的读数方法,其中,所述对所述指针型仪表的图像进行颜色过滤和霍夫变换,以检测所述指针型仪表的图像中的指针型仪表的边框的图像的步骤,包括:
3.根据权利要求1所述的读数方法,其中,所述对所述指针型仪表的图像进行颜色过滤和霍夫变换,以检测所述指针型仪表的图像中的指针型仪表的边框的图像的步骤,包括:
4.根据权利要求1所述的读数方法,其特征在于,在所述由指针型仪表识别模型确定输入的所述待识别指针型仪表位置的图像内所有像素的坐标信息,以截取指针型仪表的图像的步骤之后,并且在所述对所述指针型仪表的图像进行颜色过滤和霍夫变换的步骤之前,所述方法还包括:
5.根据权利要求4所述的读数方法,其中,所述以目标形状的基准位置坐标作为参考,根据所述指针型仪表的图像的基准位置的坐标对所述指针型仪表的图像进行水平变换以及透视变换,并且将经过水平变换以及透视变换的图像作为所述指针型仪表的图像的步骤,包括:
6.根据权利要求1所述的读数方法,其特征在于,在所述将所述待识别指针型仪表位置的图像输入到指针型仪表识别模型的步骤之前,所述方法还包括:
7.根据权利要求1所述的读数方法,其中,所述指针型仪表的轮廓为圆形或者矩形,并且当指针型仪表的轮廓为矩形时,指针型仪表中的指针是转动式的或者是水平移动式的;
8.一种指针型仪表读数装置,包括:控制器和存储器;其特征在于:
9.一种存储介质,存储有计算机可执行指令;所述计算机可执行指令用于在被读取执行时,进行如权利要求1-7中任一项所述的指针型仪表读数方法。
技术总结
本申请公开了指针型仪表读数方法、装置和存储介质。该方法包括:获取包含有指针型仪表的图像作为待识别的指针型仪表位置的图像;由指针型仪表识别模型确定输入的待识别指针型仪表位置的图像内所有像素的坐标信息,以截取指针型仪表的图像;对指针型仪表的图像进行颜色过滤和霍夫变换,以检测指针型仪表的图像中的指针型仪表的边框的图像;对去除指针型仪表的边框的图像后剩余的图像进行霍夫直线变换检测,以将检测出的最长线段作为指针所在的线段;根据指针所在的线段的像素坐标,确定指针在指针型仪表中的位置,以确定该指针所对应的读数。上述方案可以根据拍摄的图像将指针型仪表的读数识别为计算机系统中的数据,从而减少变电所的人工巡检工作。
技术研发人员:郑然,刘杨,刘小树,曹娇,邸廷尧
受保护的技术使用者:北京和利时系统集成有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!