一种基于虚功理论的膜式空气弹簧建模方法
本发明涉及车辆悬架控制,尤其涉及一种膜式空气弹簧的建模方法。
背景技术:
1、随着人们对车辆性能要求的不断提高,汽车悬架系统得到了快速的发展,因空气悬架可提高车辆的乘坐舒适性、道路保持能力和控制稳定性,成为了最为流行的悬架类型之一。空气弹簧作为空气悬架系统的主要部件,也成为了学术界和工业界研究的热点。
2、通常,空气弹簧主要分为两类,一种称为膜式空气弹簧,其中摩擦壁在压缩过程中在活塞上滚动,另一种是波纹管型空气弹簧,其橡胶壁在压缩冲程中膨胀和弯曲。膜式空气弹簧由于其突出的弹性特性而广泛应用于重型车辆的悬架系统。由于弹性力的非线性和气囊内气体的不确定性,在膜式空气弹簧的早期开发阶段存在特殊的困难,为了解决这一问题,首先应该建立一个精确的空气弹簧模型,以便该模型能够用于模拟和分析膜式空气弹簧在不同配置和参数下的特性。然而现有方法都不能提供有效的方法来解决膜式空气弹簧的建模问题。
3、综上所述,急需发明一种基于虚功理论的膜式空气弹簧建模方法。
技术实现思路
1、本发明提供一种基于虚功理论的膜式空气弹簧建模方法,旨在用有限元方法研究非传统材料对膜式空气弹簧垂直特性和物理尺寸的影响,建立能够用于模拟和分析膜式空气弹簧在不同配置和参数下特性的模型。
2、为达到以上目的,本发明采取的技术方案是:
3、一种基于虚功理论的膜式空气弹簧建模方法,所述设计方法包括以下步骤:
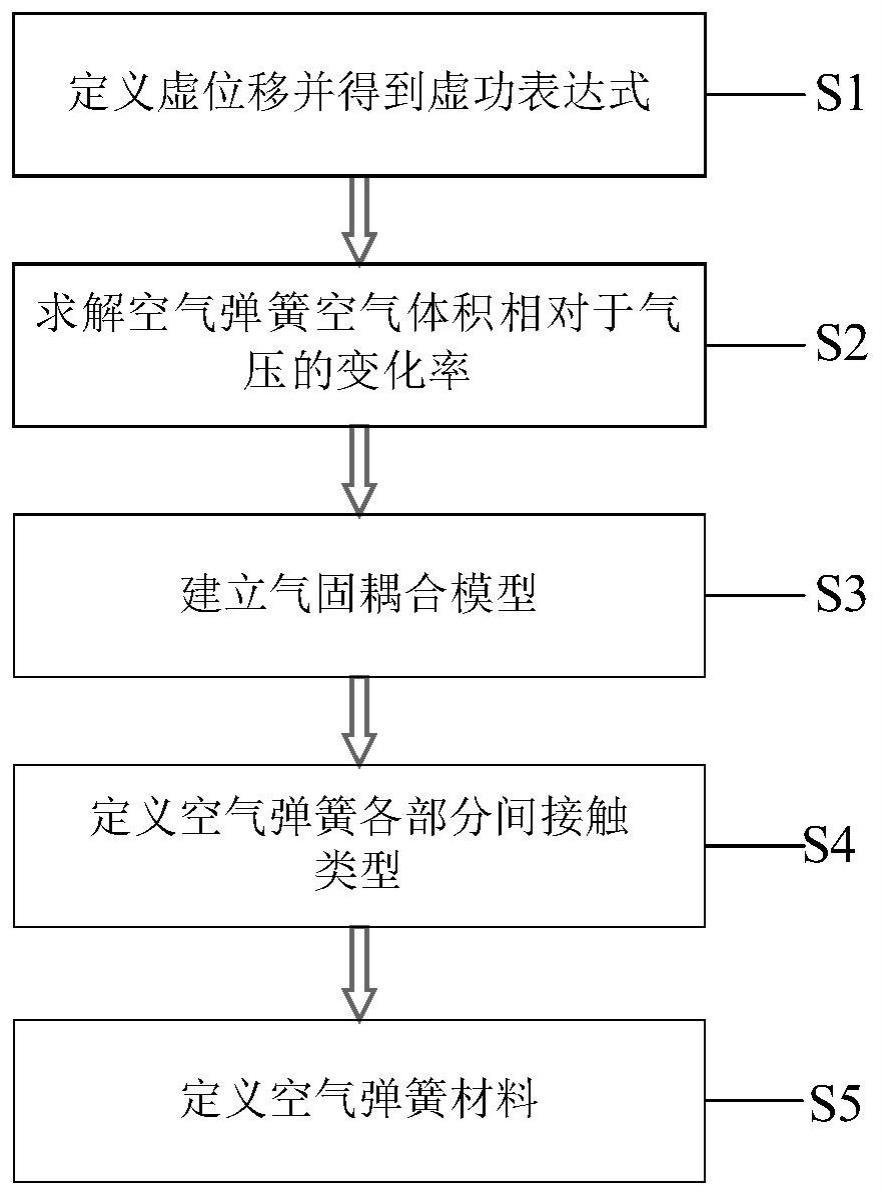
4、s1、分析膜式空气弹簧压缩与拉伸过程,定义虚位移并得到虚功表达式;
5、s2、求解空气弹簧空气体积相对于气压的变化率;
6、s3、同时考虑空气单元和气囊外壳的相互作用,建立气固耦合模型;
7、s4、定义膜式空气弹簧各部分间接触类型与摩擦类型;
8、s5、定义膜式空气弹簧材料类型,完成膜式空气弹簧建模。
9、优选地,所述s1中空气弹簧气囊内瞬时空气体积可定义为:
10、
11、其中p是空气弹簧的内部空气压力,θ是空气温度。假设粒子的数量为m,则虚功可以表示为:
12、
13、空气弹簧的虚功可以进一步定义为:
14、
15、其中δw是充气前的虚功,δv是充气时的虚体积变化,δp是虚压强变化,v是气囊的实际体积,上式的微分为:
16、
17、其中pdδv是压力负载刚度,是空气体积相对于压力的变化率。由于空气弹簧内的每个单元都被认为处于相同的压力下,根据实际做功原理,虚拟功也可以用每个单元e的总虚拟功表示:
18、
19、优选地,所述s2中空气弹簧内部的空气密度可定义为:
20、
21、式中,θr和pr分别为参考密度ρr下的温度和压力,θa是按热力学温度换算的环境温度,pa是环境压力。气囊内的空气体积可以计算为:
22、
23、其中me是单元e的质量,mt是所有单元的总质量,然后空气体积相对于压力的变化率可以表示为:
24、
25、优选地,所述s3中空气单元的节点坐标可以定义为:
26、
27、其中ni是空气单元的形状函数,可以用等参坐标ξ和η表示,其中xi(x,y)为空气单元的参考点坐标,然后空气单元的雅可比行列式可以表示为:
28、
29、通过将空气单元的法向量q与无穷小的面积da相乘,可以得到以下方程:
30、
31、无穷小的体积可以表示为:
32、
33、其中xr是空气单元的参考坐标。积分之后,空气单元的体积可以定义为:
34、
35、设为相对节点坐标,则可以获得无穷小的体积为:
36、
37、对于本发明中的f3d4空气单元,空气单元体积的表达式可表述为:
38、
39、其中是f3d4空气单元的相对节点坐标,其边界无穷小的体积为:
40、
41、优选地,所述s4中气囊的上内壁与上板之间的接触以及气囊的下内壁与活塞之间的接触都定义为壳体单元与刚性表面之间的接触。设置气囊为主动体,设置上板和活塞为被动体,因此仅考虑接触表面上的法向压力,将接触表面视为光滑表面,并将数值模型视为无摩擦接触模型。
42、数值模型可分为四个部分:气囊模型、空气模型、上板模型和活塞模型。采用四节点壳单元(abaqus中的s4r)来定义气囊模型;关于空气模型,在假设空气弹簧内部的空气是理想气体之后,可以根据inp文件的编程用流体单元来定义。在空气模拟过程中,使用了两种类型的空气单元,它们是三维三节点(abaqus中的f3d3)和三维四节点(abaqus中的f3d4);上板和活塞均由金属材料制成,这些材料被视为刚体,可以用三维三刚度单元(abaqus中的r3d3)定义。
43、本发明的有益效果在于:
44、1、本发明通过同时考虑体积变化、气固耦合以及气体和固体单元边界定义来建立膜式空气弹簧数值模型。
45、2、本发明对膜式空气弹簧的垂直特征进行了分析,该模型能够精确反映空气弹簧特性,能够用于模拟和分析膜式空气弹簧在不同配置和参数下的特性。
技术特征:
1.一种基于虚功理论的膜式空气弹簧建模方法,其特征在于,所述设计方法包括以下步骤:
2.根据权利要求1所述的基于虚功理论的膜式空气弹簧建模方法,其特征在于:所述s1中,空气弹簧气囊内瞬时空气体积可定义为:
3.根据权利要求2所述的基于虚功理论的膜式空气弹簧建模方法,所述s2中,气弹簧内部的空气密度可定义为:
4.根据权利要求3所述的基于虚功理论的膜式空气弹簧建模方法,所述s3中,空气单元的节点坐标可以定义为:
5.根据权利要求4所述的基于虚功理论的膜式空气弹簧建模方法,所述s4中,气囊的上内壁与上板之间的接触以及气囊的下内壁与活塞之间的接触都定义为壳体单元与刚性表面之间的接触,设置气囊为主动体,设置上板和活塞为被动体,因此仅考虑接触表面上的法向压力,将接触表面视为光滑表面,并将数值模型视为无摩擦接触模型。
6.数值模型可分为四个部分:气囊模型、空气模型、上板模型和活塞模型,采用四节点壳单元(abaqus中的s4r)来定义气囊模型;关于空气模型,在假设空气弹簧内部的空气是理想气体之后,可以根据inp文件的编程用流体单元来定义,在空气模拟过程中,使用了两种类型的空气单元,它们是三维三节点(abaqus中的f3d3)和三维四节点(abaqus中的f3d4);上板和活塞均由金属材料制成,这些材料被视为刚体,可以用三维三刚度单元(abaqus中的r3d3)定义。
技术总结
本发明提供一种基于虚功理论的膜式空气弹簧建模方法,涉及车辆悬架设计分析领域,包括以下步骤:S1:定义虚位移并得到虚功表达式;S2:求解空气弹簧空气体积相对于气压的变化率;S3:建立气固耦合模型;S4:定义膜式空气弹簧各部分间接触类型与摩擦类型;S5:定义膜式空气弹簧材料类型。本发明以建立一个精确的空气弹簧模型,能够用于模拟和分析膜式空气弹簧在不同配置和参数下的特性为目的,基于虚功理论同时考虑体积变化、气固耦合以及气体和固体单元边界定义来建立膜式空气弹簧数值模型。
技术研发人员:赵晶,安润兴,刘泰佑,刘锦灿,李国全,庞滔,李锦豪
受保护的技术使用者:东北大学佛山研究生创新学院
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!