一种压力机顶料机构运动学参数狼群领袖优化方法
本发明涉及压力机顶料机构机械设计,尤其涉及一种压力机顶料机构运动学参数狼群领袖优化方法。
背景技术:
1、顶料机构作为压力机的关键结构,要求顶料机构与压力机主传动机构之间有良好的运动性能匹配关系,同时要求顶料机构在运动过程中速度平缓无冲击。
2、已有的压力机顶料机构优化的方法主要包括:一、利用图解法分析计算,得出顶料机构顶杆的最大行程;二、利用解析法理论分析计算,得出顶料机构中各零件的运动规律;三、利用仿真软件模拟计算分析顶料机构中顶杆的运动特性。但是已有的优化方法不能满足快速设计的要求,且存在设计精度低的缺陷。
技术实现思路
1、本发明的目的在于揭示一种压力机顶料机构运动学参数狼群领袖优化方法,用于解决现有技术中的优化方法不能满足快速设计的要求,且存在设计精度低的缺陷,以达到快速设计和提高设计精度的目的。
2、为实现上述目的之一,本发明提供了一种压力机顶料机构运动学参数狼群领袖优化方法,包括:
3、压力机顶料机构;
4、所述压力机顶料机构包括:
5、拉杆,所述拉杆两端分别枢转连接摆杆和角架,凸轮,所述凸轮与所述摆杆活动连接,传动杆,所述传动杆一端与所述角架枢转连接,所述传动杆另一端枢转连接摆盘,所述摆盘配置有卡套,所述卡套一侧安装有顶杆;
6、压力机顶料机构运动学参数狼群领袖优化方法的具体步骤包括:
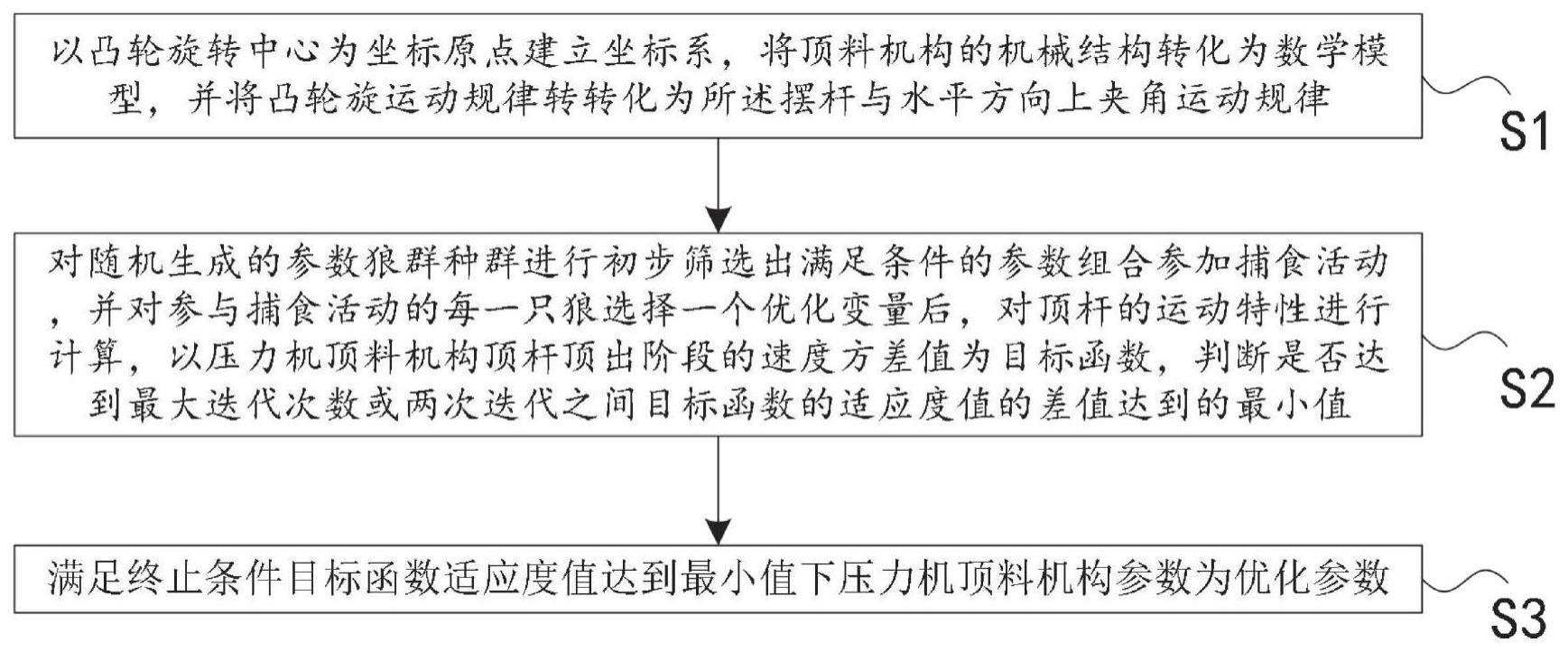
7、以所述凸轮旋转中心为坐标原点建立坐标系,将顶料机构的机械结构转化为数学模型,并将所述凸轮旋运动规律转转化为所述摆杆与水平方向上夹角运动规律;
8、对随机生成的参数狼群种群进行初步筛选出满足条件的参数组合参加捕食活动,并对参与捕食活动的每一只狼选择一个优化变量后,对所述顶杆的运动特性进行计算,以压力机顶料机构顶杆顶出阶段的速度方差值为目标函数,判断是否达到最大迭代次数或两次迭代之间目标函数的适应度值的差值达到的最小值;
9、满足终止条件目标函数适应度值达到最小值下压力机顶料机构参数为优化参数。
10、作为本发明的进一步改进,所述若优化得到的参数不满足终止条件,则对所述顶杆的运动特性进行计算,以压力机顶料机构顶杆顶出阶段的速度方差值为目标函数,若循环次数达到设定次数仍未满足终止条件,则停止计算。
11、作为本发明的进一步改进,所述优化参数包括:
12、凸轮基圆半径rmin,凸轮的最大半径rmax,摆杆长度l1,拉杆长度l2,角架边长l3、l4,传动杆长度l5,摆盘最大直径l6,卡套最大直径l7。
13、作为本发明的进一步改进,所述将待优化参数rmin、rmax、l1、l2、l3、l4、l5、l6、l7一一对应为变量x0、x1、x2、x3、x4、x5、x6、x7、x8各变量以xj表征,优化参数下摆杆与水平方向的夹角角度α(i),其中,夹角最大值为αmax,最小值为αmin;
14、将初始零件尺寸r0min、r0max、l01、l02、l03、l04、l05、l06、l07一一对应为变量y0、y1、y2、y3、y4、y5、y6、y7、y8各变量以yj表征,初始参数下摆杆与水平方向的夹角最大值为βmax,最小值为βmin。
15、
16、
17、作为本发明的进一步改进,将凸轮旋转角划分为四个转动范围包括近休止角θ1,推程运动角θ2,远休止角θ3,回程运动角θ4,凸轮实际旋转角度为φ(i);所述将凸轮旋运动规律转转化为摆杆与水平方向上夹角运动规律包括:
18、近休止阶段0≤φ(i)<θ1:
19、α(i)=αmin#(3)
20、推程阶段θ1≤φ(i)<θ2+θ1:
21、
22、α(i)=αmin+(αmax-αmin)*a#(4)
23、远休止阶段θ2+θ1≤φ(i)<θ3+θ2+θ1
24、α(i)=αmax#(5)
25、回程阶段θ3+θ2+θ1≤φ(i)≤θ4+θ3+θ2+θ1
26、
27、α(i)=αmin+(αmax-αmin)*b#(6)。
28、作为本发明的进一步改进,所述顶杆位移与所述凸轮主轴转角之间的关系,记为函数s(i),所述顶杆速度与所述凸轮转角之间的关系,记为函数v(i),所述顶杆加速度与所述凸轮转角之间的关系,记为函数a(i)包括:
29、
30、
31、
32、其中xa、ya为摆杆固定铰接点坐标,xe、ye为角架固定铰接点,xh、yh坐标为摆盘固定铰接点w为凸轮旋转速度。ya、xe、ye、xh、yh、w只与压力机顶料机构自身机械结构有关为常数。
33、作为本发明的进一步改进,初始参数下摆杆与水平方向的夹角最大值βmax,最小值βmin,随机生成的参数狼群种群进行初步筛选出满足条件的参数组合参加捕食活动包括:
34、
35、作为本发明的进一步改进,所述对参与捕食活动的每一只狼选择一个优化变量后,对所述顶杆的运动特性进行计算包括;
36、s(i)=s(xj(i))#(11)
37、v(i)=v(xj(i))#(12)
38、a(i)=a(xj(i))#(13)
39、同时压力机顶杆位移s(i)要时刻与压力机滑块位移s1(i)匹配且对顶杆的最大行程范围进行设定如式(14)和式(15)所示:
40、0<s(i)<s1(i)#(14)
41、0≤s(i)max-s≤δ#(15)
42、其中s1(yj(i))为在初始机构参数下压力机滑块位移与凸轮主轴转角之间的关系式,s为目标行程,δ为顶杆行程允许最大误差值,s(xi(i))max为在xj的杆系组合下顶杆的最大位移。
43、作为本发明的进一步改进,所述目标函数为:
44、
45、作为本发明的进一步改进,所述满足终止条件目标函数适应度值达到最小值下压力机顶料机构参数为优化参数包括:
46、如式(18)所示:f(xj)=min(var(vxj))#(18)。
47、与现有技术相比,本发明的有益效果是:
48、本发明提供的一种压力机顶料机构运动学参数狼群领袖优化方法,通过对随机生成的参数狼群种群进行初步筛选出满足条件的参数组合参加捕食活动,并对参与捕食活动的每一只狼选择一个优化变量后,对顶杆的运动特性进行计算,以压力机顶料机构顶杆顶出阶段的速度方差值为目标函数,判断是否达到最大迭代次数或两次迭代之间目标函数的适应度值的差值σ达到的最小值σmin,满足终止条件目标函数适应度值达到最小值下压力机顶料机构参数为优化参数,不仅实现快速设计的目的,还达到了提高设计精度的目的。
技术特征:
1.一种压力机顶料机构运动学参数狼群领袖优化方法,其特征在于,包括:
2.根据权利要求1所述的压力机顶料机构运动学参数狼群领袖优化方法,其特征在于,若优化得到的参数不满足终止条件,则对所述顶杆的运动特性进行计算,以压力机顶料机构顶杆顶出阶段的速度方差值为目标函数,若循环次数达到设定次数仍未满足终止条件,则停止计算。
3.根据权利要求2所述的压力机顶料机构运动学参数狼群领袖优化方法,其特征在于,所述优化参数包括:
4.根据权利要求3所述的压力机顶料机构运动学参数狼群领袖优化方法,其特征在于,将待优化参数rmin、rmax、l1、l2、l3、l4、l5、l6、l7一一对应为变量x0、x1、x2、x3、x4、x5、x6、x7、x8各变量以xj表征,优化参数下摆杆与水平方向的夹角角度α(i),其中,夹角最大值为αmax,最小值为αmin;
5.根据权利要求4所述的压力机顶料机构运动学参数狼群领袖优化方法,其特征在于,将凸轮旋转角划分为四个转动范围包括近休止角θ1,推程运动角θ2,远休止角θ3,回程运动角θ4,凸轮实际旋转角度为φ(i);所述将凸轮旋运动规律转转化为摆杆与水平方向上夹角运动规律包括:
6.根据权利要求5所述的压力机顶料机构运动学参数狼群领袖优化方法,其特征在于,所述顶杆位移与所述凸轮主轴转角之间的关系,记为函数s(i),所述顶杆速度与所述凸轮转角之间的关系,记为函数v(i),所述顶杆加速度与所述凸轮转角之间的关系,记为函数a(i)包括:
7.根据权利要求6所述的压力机顶料机构运动学参数狼群领袖优化方法,其特征在于,初始参数下摆杆与水平方向的夹角最大值为βmax,最小值为βmin,所述对随机生成的参数狼群种群进行初步筛选出满足条件的参数组合参加捕食活动包括:
8.根据权利要求7所述的压力机顶料机构运动学参数狼群领袖优化方法,其特征在于,所述对参与捕食活动的每一只狼选择一个优化变量后,对所述顶杆的运动特性进行计算包括;
9.根据权利要求8所述的压力机顶料机构运动学参数狼群领袖优化方法,其特征在于,所述目标函数为:
10.根据权利要求9所述的压力机顶料机构运动学参数狼群领袖优化方法,其特征在于,所述满足终止条件目标函数适应度值达到最小值下压力机顶料机构参数为优化参数包括:
技术总结
本发明提供了一种压力机顶料机构运动学参数狼群领袖优化方法,该方法包括:对随机生成的参数狼群种群进行初步筛选出满足条件的参数组合参加捕食活动,满足终止条件目标函数适应度值达到最小值下压力机顶料机构参数为优化参数。本发明通过提供一种压力机顶料机构运动学参数狼群领袖优化方法,通过对随机生成的参数狼群种群初步筛选出满足条件的参数组合参加捕食活动,并对参与捕食活动的每一只狼选择一个优化变量后,对顶杆的运动特性进行计算,满足终止条件目标函数适应度值达到最小值下压力机顶料机构参数为优化参数,不仅实现快速设计的目的,还达到了提高设计精度的目的。
技术研发人员:翟华,宋照爱,张英杰,戚崇云,江秀花,张清林
受保护的技术使用者:合肥工业大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!