开放式车厢内分隔物的识别方法、识别系统和存储介质与流程
本发明涉及三维检测,尤其涉及开放式车厢内分隔物的识别方法、识别系统和存储介质。
背景技术:
1、目前工厂在进行大量的各类袋装货物、箱体货物的转运时,通常是由货运汽车或货运火车等交通工具来完成。而货车车厢为了保证其结构的稳定性,尤其避免车厢栏板因为货物的挤压而变形,通常在车厢的两侧栏板之间设置有多个拉筋。而目前在各类货物转运场所中,越来越多的采用自动装载设备来替换人力装载。在装载设备进行货物投放或抓取时,需要避开车厢内的拉筋,以防止装载机构碰撞拉筋或投放的货物砸到拉筋上。目前识别拉筋的位置方法主要还是人工手动采样,随意性比较大且数据误差较大,另外由于车厢内拉筋状态不同,存在拉筋前后弯曲或者倾斜等姿态,导致无法准确获取这些拉筋的位置,从而影响车厢内货物的装载。
技术实现思路
1、本发明针对现有技术中的不足,提供了一种开放式车厢内分隔物的识别方法,用于获取车厢内拉筋位置,包括如下步骤:
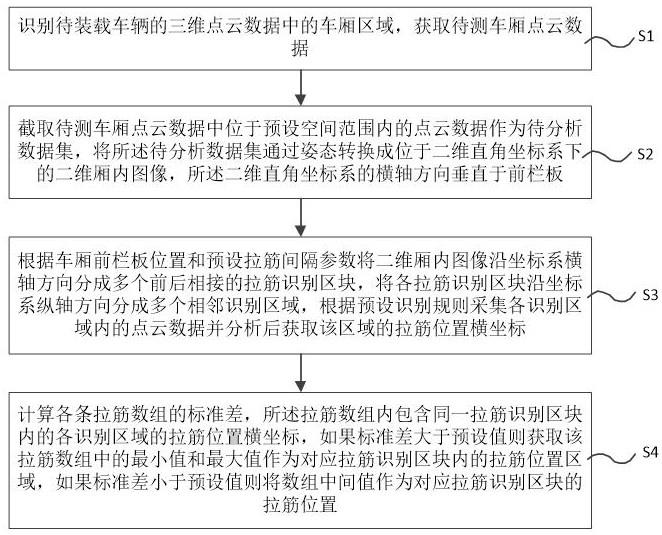
2、s1,识别待装载车辆的三维点云数据中的车厢区域,获取待测车厢点云数据;
3、s2,截取待测车厢点云数据中位于预设空间范围内的点云数据作为待分析数据集,将所述待分析数据集通过姿态转换成位于二维直角坐标系下的二维厢内图像,所述二维直角坐标系的横轴方向垂直于前栏板;
4、s3,根据车厢前栏板位置和预设拉筋间隔参数将二维厢内图像沿坐标系横轴方向分成多个前后相接的拉筋识别区块,将各拉筋识别区块沿坐标系纵轴方向分成多个相邻识别区域,根据预设识别规则采集各识别区域内的点云数据并分析后获取该区域的拉筋位置横坐标;
5、s4,计算各条拉筋数组的标准差,所述拉筋数组内包含同一拉筋识别区块内的各识别区域的拉筋位置横坐标,如果标准差大于预设值则获取该拉筋数组中的最小值和最大值作为对应拉筋识别区块内的拉筋位置区域,如果标准差小于预设值则将数组中间值作为对应拉筋识别区块的拉筋位置。
6、优选的,所述步骤s4包括:
7、计算各条拉筋数组中的两个前后相邻识别区域的对应拉筋位置横坐标的差值;
8、如果所述差值大于第一预设值,则在该拉筋数组中去除两拉筋位置横坐标中的较大值,并保留较小值继续与拉筋数组中相邻识别区域的拉筋位置横坐标进行差值判断,直至拉筋数组各相邻识别区域的拉筋位置横坐标差值均不大于预设值。
9、优选的,所述步骤s4包括:
10、计算各条拉筋数组中的拉筋位置横坐标的标准差;
11、如果一拉筋数组中的拉筋位置横坐标的标准差大于第二预设值,则该拉筋数组对应拉筋识别区块内的拉筋呈弯曲状或x型,获取对应拉筋数组中的最小值和最大值作为该拉筋识别区块的拉筋位置区域;
12、如果一拉筋数组中的拉筋位置横坐标的标准差不大于第二预设值,则该拉筋数组对应拉筋识别区块内的拉筋为线型,获取将对应拉筋数组中的中间值作为该拉筋识别区块的拉筋位置区域。
13、优选的,所述步骤s2包括:
14、截取待测车厢点云数据中位于车厢两侧栏板内的距离两侧栏板大于预设值的第二点云数据,并将其通过姿态转换成在第二直角坐标系下的二维厢体侧视图像;所述第二直角坐标系的横轴方向与厢体前栏板垂直并指向后栏板方向,纵轴方向与厢体前栏板平行。
15、优选的,所述步骤s2包括:
16、截取待测车厢点云数据中位于车厢栏板预设高度内的第一点云数据,并将其通过姿态转换成在第一直角坐标系下的二维厢体俯视图像;所述第一直角坐标系的横轴方向与厢体一侧栏板平行并指向后栏板方向,纵轴方向与厢体前栏板平行。
17、本发明还公开了一种开放式车厢内分隔物的识别系统,用于获取车厢内拉筋位置,包括:识别模块,用于识别待装载车辆的三维点云数据中的车厢区域,获取待测车厢点云数据;二维转换模块,用于截取待测车厢点云数据中位于预设空间范围内的点云数据作为待分析数据集,将所述待分析数据集通过姿态转换成位于二维直角坐标系下的二维厢内图像,所述二维直角坐标系的横轴方向垂直于前栏板;区域分隔模块,用于根据车厢前栏板位置和预设拉筋间隔参数将二维厢内图像沿坐标系横轴方向分成多个前后相接的拉筋识别区块,将各拉筋识别区块沿坐标系纵轴方向分成多个相邻识别区域,根据预设识别规则采集各识别区域内的点云数据并分析后获取该区域的拉筋位置横坐标;位置识别模块,用于计算各条拉筋数组的标准差,所述拉筋数组内包含同一拉筋识别区块内的各识别区域的拉筋位置横坐标,如果标准差大于预设值则获取该拉筋数组中的最小值和最大值作为对应拉筋识别区块内的拉筋位置区域,如果标准差小于预设值则将数组中间值作为对应拉筋识别区块的拉筋位置。
18、优选的,所述位置识别模块具体包括:差值统计模块,用于计算各条拉筋数组中的两个前后相邻识别区域的对应拉筋位置横坐标的差值;判断模块,用于在所述差值大于第一预设值时在该拉筋数组中去除两拉筋位置横坐标中的较大值,并保留较小值继续与拉筋数组中相邻识别区域的拉筋位置横坐标进行差值判断,直至拉筋数组各相邻识别区域的拉筋位置横坐标差值均不大于预设值。
19、优选的,所述位置识别模块还包括:标准差计算模块,用于计算各条拉筋数组中的拉筋位置横坐标的标准差;第一位置获取模块,用于在拉筋数组中的拉筋位置横坐标的标准差大于第二预设值时确认该拉筋数组对应拉筋识别区块内的拉筋呈弯曲状或x型,获取对应拉筋数组中的最小值和最大值作为该拉筋识别区块的拉筋位置区域;第二位置获取模块,用于在拉筋数组中的拉筋位置横坐标的标准差不大于第二预设值时确认该拉筋数组对应拉筋识别区块内的拉筋为线型,获取将对应拉筋数组中的中间值作为该拉筋识别区块的拉筋位置区域。
20、本发明还公开了一种开放式车厢内分隔物的识别装置,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上述任一所述方法的步骤。
21、本发明还公开了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如上述任一所述方法的步骤。
22、本发明公开的开放式车厢内分隔物的识别方法、识别系统和存储介质,通过识别待装载车辆的三维点云数据中的车厢区域来获取待测车厢点云数据,然后截取待测车厢点云数据中位于预设空间范围内的点云数据作为待分析数据集并转换成二维厢内图像,根据车厢前栏板位置和预设拉筋间隔参数将二维厢内图像沿坐标系横轴方向分成多个前后相接的拉筋识别区块和沿坐标系纵轴方向的多个相邻识别区域,并分析获取各段拉筋位置横坐标,通过计算各条拉筋数组的标准差并根据标准差大小来分别获取拉筋位置区域。从而克服了车厢内拉筋前后倾斜连接或呈前后分隔的x型时,仅获取拉筋中间位置等单一位置范围导致的拉筋区域识别偏差,继而使得投放的部分货物碰撞到拉筋上导致跺型混乱的问题。
23、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.开放式车厢内分隔物的识别方法,用于获取车厢内拉筋位置,其特征在于,包括如下步骤:
2.根据权利要求1所述的开放式车厢内分隔物的识别方法,其特征在于,所述步骤s4包括:
3.根据权利要求2所述的开放式车厢内分隔物的识别方法,其特征在于,所述步骤s4包括:
4.根据权利要求3所述的开放式车厢内分隔物的识别方法,其特征在于,所述步骤s2包括:
5.根据权利要求3所述的开放式车厢内分隔物的识别方法,其特征在于,所述步骤s2包括:
6.开放式车厢内分隔物的识别系统,用于获取车厢内拉筋位置,其特征在于,包括:
7.根据权利要求6所述的开放式车厢内分隔物的识别系统,其特征在于,所述位置识别模块具体包括:
8.根据权利要求7所述的开放式车厢内分隔物的识别系统,其特征在于,所述位置识别模块还包括:
9.一种开放式车厢内分隔物的识别装置,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于:所述处理器执行所述计算机程序时实现如权利要求1-5任一所述方法的步骤。
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于:所述计算机程序被处理器执行时实现如权利要求1-5任一所述方法的步骤。
技术总结
本发明公开了开放式车厢内分隔物的识别方法、识别系统和存储介质,通过识别待装载车辆的三维点云数据中的车厢区域来获取待测车厢点云数据,然后截取待测车厢点云数据中位于预设空间范围内的点云数据作为待分析数据集并转换成二维厢内图像,根据车厢前栏板位置和预设拉筋间隔参数将二维厢内图像沿坐标系横轴方向分成多个前后相接的拉筋识别区块和沿坐标系纵轴方向的多个相邻识别区域,通过计算各条拉筋数组的标准差并根据标准差大小来分别获取拉筋位置区域。从而克服了车厢内拉筋前后倾斜连接或呈前后分隔的X型时,仅获取拉筋单一位置范围导致的拉筋区域识别偏差,继而使得投放的部分货物碰撞到拉筋上导致跺型混乱的问题。
技术研发人员:王哲象,李加乐,汪长青,余其真,闫玉强,邵勇粮,丁沣城,王金江,裘哲涵
受保护的技术使用者:杭州明度智能科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!