踩踏坐标算法及智能踩踏板系统的制作方法
本发明属于智能算法,具体涉及一种踩踏坐标算法及智能踩踏板系统。
背景技术:
1、踩踏板指的是用于房屋地面或楼面的表面层的建筑材料,是有木料或其他材料制造而成的。踩踏板通常仅被赋予了承载和美观的作用,其性能作用单一乏味,不具有多样化、智能化,不能满足人们的需求。
2、随着科技对人们生活影响的逐步加大,人们更加渴望科技能为自己带来更加便利的生活,因此,智能踩踏板应运而生。智能踩踏板通常包括设置在其底面的压力传感器及微控制器,压力传感器感应压力信息,当压力信息改变时,认为该智能踩踏板被踩踏。
3、但是现有的智能踩踏板无法确定被踩踏的具体坐标位置,为了增加坐标精度,通常在智能踩踏板底面设置若干排压力传感器来确定,或者,将智能踩踏板设计的较小,以确定哪块智能地方被踩踏来缩小坐标位置范围。显然,设计若干压力传感器,不仅增加了成本,还需要实时扫描计算压力信息,降低了获取踩踏坐标位置的及时性。将智能踩踏板设计的较小时,增加了铺设难度,也降低了踩踏板的适用性。
技术实现思路
1、本发明针对现有的智能踩踏板无法定位被踩踏的具体坐标位置的技术问题,目的在于提供一种踩踏坐标算法。
2、一种踩踏坐标算法,包括:
3、获取四个压力传感器采集的压力值,将四个所述压力传感器中的一个的位置作为坐标原点,建立平面坐标系;
4、设外部施加力作用在平台上时在所述平面坐标系中的坐标位置为p(x,y),采用预设的力矩平衡方法,分别计算x的值和y的值,得到坐标位置p(x,y)。
5、作为优选方案,所述平台是至少顶面为平面的片状结构,优选为踩踏板或智能踩踏板。
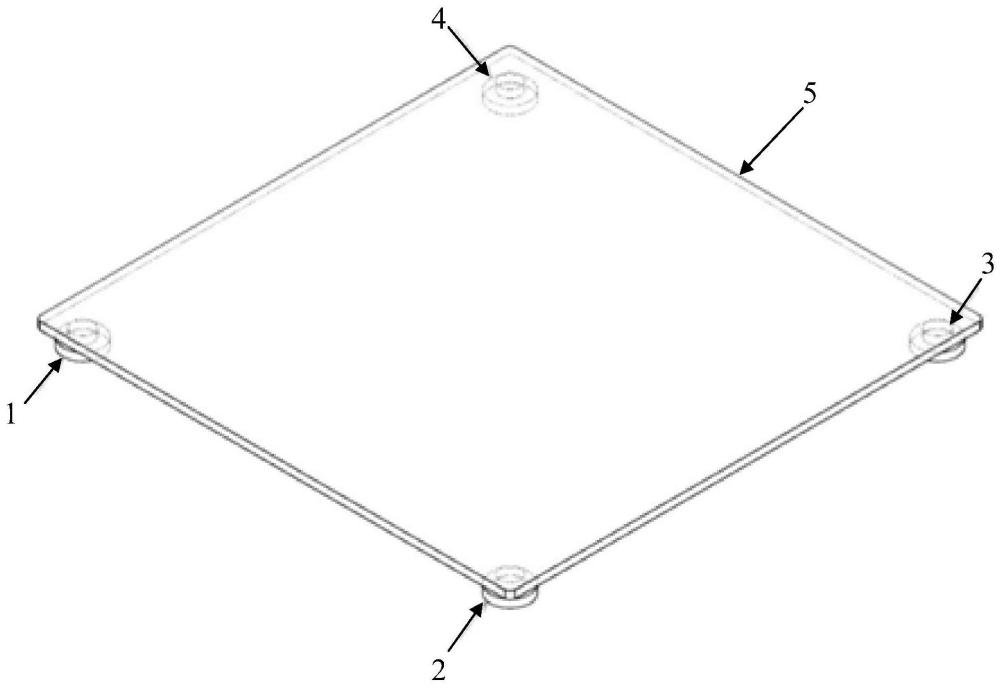
6、作为优选方案,四个所述压力传感器分别设置在所述平台的四个端角底面。
7、作为优选方案,所述将四个所述压力传感器中的一个的位置作为坐标原点,建立平面坐标系,包括:
8、四个所述压力传感器围成矩形结构,设四个所述压力传感器在所述平台上的位置以顺时针编号为点a、点b、点c和点d,定义点a为坐标原点,点a和点d相连的直线为x轴,点a到点d之间的距离为d1,点a和点b相连的直线为y轴,点a到点b之间的距离为d2,建立平面坐标系。
9、作为优选方案,所述p(x,y)位于四个所述压力传感器围成矩形结构内。
10、作为优选方案,所述采用预设的力矩平衡方法,分别计算x的值和y的值,得到坐标位置p(x,y),包括:
11、
12、
13、其中,f1为点a处的反作用力,f4为点b处的反作用力,f3为点c处的反作用力,f2为点d处的反作用力。
14、作为优选方案,点a处的反作用力、点b处的反作用力、点c处的反作用力和点d处的反作用力分别为点a处获取的压力值、点b处获取的压力值、点c处获取的压力值和点d处获取的压力值。
15、作为优选方案,点a处的反作用力、点b处的反作用力、点c处的反作用力和点d处的反作用力分别为点a处获取的压力值减去预设的重力、点b处获取的压力值减去预设的重力、点c处获取的压力值减去预设的重力和点d处获取的压力值减去预设的重力。
16、作为优选方案,四个所述压力传感器围成正方形结构,则:
17、d1=d2=d
18、
19、
20、得到坐标位置p(x,y)。
21、一种智能踩踏板系统,包括:
22、信号采集模块,用于分别采集踩踏板四个端角的压力值;
23、坐标计算模块,内置有本发明的踩踏坐标算法,通过所述踩踏坐标算法得到外部施加力在所述踩踏板上的位置。
24、本发明的积极进步效果在于:本发明采用踩踏坐标算法,具有如下优点:
25、1、只需在平台底面四周各设置一个压力传感器,共计四个压力传感器,大大节省了压力传感器的布置,且平台的大小规格不受限制,增加了平台的适用性。
26、2、通过力矩平衡方法就可实时得到踩踏平台时的坐标位置,增高坐标算法简单方便,具有较好的及时性。
技术特征:
1.一种踩踏坐标算法,其特征在于,包括:
2.如权利要求1所述的踩踏坐标算法,其特征在于,所述平台是至少顶面为平面的片状结构。
3.如权利要求1所述的踩踏坐标算法,其特征在于,四个所述压力传感器分别设置在所述平台的四个端角底面。
4.如权利要求1所述的踩踏坐标算法,其特征在于,所述将四个所述压力传感器中的一个的位置作为坐标原点,建立平面坐标系,包括:
5.如权利要求4所述的踩踏坐标算法,其特征在于,所述p(x,y)位于四个所述压力传感器围成矩形结构内。
6.如权利要求4所述的踩踏坐标算法,其特征在于,所述采用预设的力矩平衡方法,分别计算x的值和y的值,得到坐标位置p(x,y),包括:
7.如权利要求6所述的踩踏坐标算法,其特征在于,点a处的反作用力、点b处的反作用力、点c处的反作用力和点d处的反作用力分别为点a处获取的压力值、点b处获取的压力值、点c处获取的压力值和点d处获取的压力值。
8.如权利要求6所述的踩踏坐标算法,其特征在于,点a处的反作用力、点b处的反作用力、点c处的反作用力和点d处的反作用力分别为点a处获取的压力值减去预设的重力、点b处获取的压力值减去预设的重力、点c处获取的压力值减去预设的重力和点d处获取的压力值减去预设的重力。
9.如权利要求4至8中任意一项所述的踩踏坐标算法,其特征在于,四个所述压力传感器围成正方形结构,则:
10.一种智能踩踏板系统,其特征在于,包括:
技术总结
本发明属于智能踩踏板技术领域,具体涉及一种踩踏坐标算法及智能踩踏板系统。其中,一种踩踏坐标算法,包括:获取四个压力传感器采集的压力值,将四个压力传感器中的一个的位置作为坐标原点,建立平面坐标系;设外部施加力作用在平台上时在平面坐标系中的坐标位置为P(x,y),采用预设的力矩平衡方法,分别计算x的值和y的值,得到坐标位置P(x,y)。本发明只需在平台底面四周各设置一个压力传感器,共计四个压力传感器,通过力矩平衡方法就可实时得到踩踏平台时的坐标位置,增高坐标算法简单方便,具有较好的及时性和适用性。
技术研发人员:李寅生,杨日伟,潘振
受保护的技术使用者:上海寅生科技有限公司
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!