一种柱体侧壁孔洞旋转角度检测方法与流程
本发明涉及机器视觉,尤其涉及一种柱体侧壁孔洞旋转角度检测方法。
背景技术:
1、机器视觉技术,是一门涉及人工智能、神经生物学、心理物理学、图像处理、模式识别等诸多领域的交叉学科,机器视觉主要用计算机来模拟人的视觉功能,从客观事物的图像中提取信息,进行处理并加以理解,最终用于实际检测、测量和控制。
2、在机器视觉技术领域,往往需要对圆柱体侧壁孔洞的旋转角度进行检测与识别,但由于柱体侧壁为曲面,从而导致孔洞识别效果差、旋转角度检测精度低等问题的出现。
技术实现思路
1、根据以上技术问题,本发明提供一种可提高检测效率和检测精度的一种柱体侧壁孔洞旋转角度检测方法。
2、本发明提供一种柱体侧壁孔洞旋转角度检测方法,其特征在于包括以下步骤:
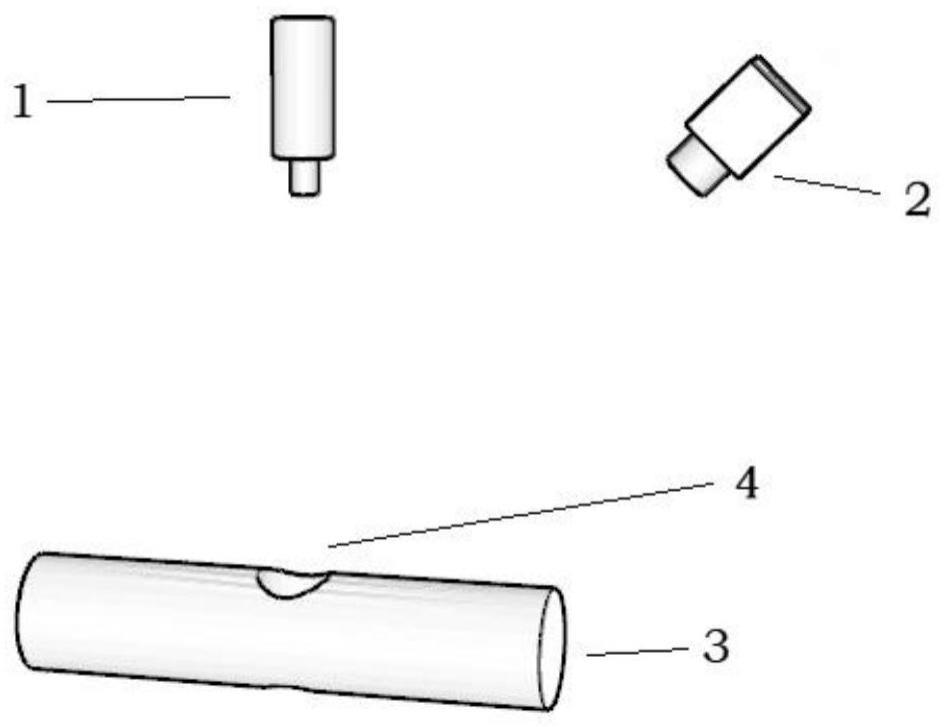
3、步骤一:进行图像采集,将彩色激光发射器作为柱体侧壁孔洞的光源,将激光发射器位于柱体侧壁孔洞正上方,使激光束垂直照射在柱体侧壁孔洞,摄像机、柱体、激光发射器在同一平面。
4、步骤二:进行激光中心线的提取,通过设定机器视觉领域常用方法roi(regionofinterest)感兴趣区域,缩小检测范围,对roi内的图像进行预处理操作,消除干扰点,对预处理后的图像提取出光条中心线。
5、步骤三:补充断点和平滑曲线,对roi区域内的光条中心线从左到右、从上到下进行检测,并判断出其是否发生断层。若有断层,则需要补充断点。若无断层,则不许要添加断点。最终得到一条较为完整的曲线。
6、步骤四:关键点的检测,根据光条曲线波动特点,发现曲线发生断层或出现拐点的位置即为孔洞的边缘位置,故可根据孔洞的边缘位置来计算出柱体的旋转方向和角度。
7、步骤五:计算旋转角度,激光照射柱体所呈现出来的图像为一近似椭圆图像,通过最小二乘法将激光亮条图像拟合成椭圆,公式如下:设椭圆方程为:ax2+bxy+cy2+dx+ey+f=0,根据最小二乘法原理,所拟合的目标函数为:欲使f(a,b,c,d,e)值为最小,需要使解方程可得到系数a,b,c,d,e的值。根据柱体旋转状态,确定激光与孔洞边缘相交的坐标点,再通过仿射变换将椭圆拟合成单位圆,计算公式如下:设椭圆的标准方程为:单位圆标准方程为:x'2+y'2=1,令便可将椭圆放射变换成单位圆。并将旋转前后椭圆上的坐标转换成圆上的坐标,从而计算出柱体旋转的方向和角度。计算角度公式如下:设p1’(x1,y1),p3’(x2,y2)为单位圆上的两个点,p1’与x轴所成夹角为β,p3’与x轴所成夹角为α,柱体旋转角度为θ。
8、所述步骤一中激光束与柱体长轴所成夹角为90°,所述步骤一中摄像机与激光发射器应具有一定的夹角,所述夹角优选30°~60°之间。
9、所述步骤二中roi感兴趣区域优选矩形、圆形、圆环、多边形,所述步骤二中提取出光条中心线的方法优选极值法、灰度重心法、几何中心法、抛物线拟合法和hessian矩阵法。
10、所述步骤三中平滑曲线的方法优选移动平均算法、局部加权光滑描点技术、局部加权多项式回归拟合、savitzky-golay。
11、所述步骤四中计算拐点位置的具体操作为,采用非相邻两点做一直线,令该两点之间的距离为step,该两点的中点到该直线的距离为dis,即dis值越大,该点为拐点或断点的可能性就越大,通过调节step和dis数值大小确定孔洞的边缘关键点位置。
12、所述步骤五的具体操作为,当柱体没有旋转,孔洞开孔方向垂直水平面向上,激光与孔洞边缘相交于两个坐标点p1和p2,假设柱体发生逆时针旋转,激光与孔洞边缘相交于另外两个坐标点p3和p4,通过仿射变换将椭圆拟合成单位圆,并将旋转前后椭圆上4个点(p1、p2、p3、p4)的坐标转换成圆上的4个点(p1’、p2’、p3’、p4’)的坐标,已知柱体旋转之前孔洞边缘坐标和旋转之后孔洞边缘坐标,便可求出柱体旋转的方向和角度。
13、本发明的有益效果为:本发明为一种柱体侧壁孔洞旋转角度检测方法,通过五个步骤的具体操作配合相应公式的计算以及图像的处理等,能够快速的、准确的检测出柱体侧壁孔洞旋转角度,提高检测效率的同时也提高检测的精度,可满足工业生产的要求,操作简便,实用性强。
技术特征:
1.一种柱体侧壁孔洞旋转角度检测方法,其特征在于包括以下步骤:
2.根据权利要求1所述的一种柱体侧壁孔洞旋转角度检测方法,其特征在于所述步骤一中激光束与柱体长轴所成夹角为90°,
3.根据权利要求1所述的一种柱体侧壁孔洞旋转角度检测方法,其特征在于所述步骤二中roi感兴趣区域优选矩形、圆形、圆环、多边形,所述步骤二中提取出光条中心线的方法优选极值法、灰度重心法、几何中心法、抛物线拟合法和hessian矩阵法。
4.根据权利要求1所述的一种柱体侧壁孔洞旋转角度检测方法,其特征在于所述步骤四中计算拐点位置的具体操作为,采用非相邻两点做一直线,令该两点之间的距离为step,该两点的中点到该直线的距离为dis,即dis值越大,该点为拐点或断点的可能性就越大,通过调节step和dis数值大小确定孔洞的边缘关键点位置。
5.根据权利要求1所述的一种柱体侧壁孔洞旋转角度检测方法,其特征在于所述步骤五的具体操作为,当柱体没有旋转,孔洞开孔方向垂直水平面向上,激光与孔洞边缘相交于两个坐标点p1和p2,假设柱体发生逆时针旋转,激光与孔洞边缘相交于另外两个坐标点p3、p4,再通过仿射变换将椭圆拟合成单位圆,并将旋转前后椭圆上4个点(p1、p2、p3、p4)的坐标转换成圆上的4个点(p1’、p2’、p3’、p4’)的坐标,已知柱体旋转之前孔洞边缘坐标和旋转之后孔洞边缘坐标,便可求出柱体旋转的方向和角度。
技术总结
本发明提供一种柱体侧壁孔洞旋转角度检测方法,其特征在于包括包括以下步骤:步骤一:进行图像采集,步骤二:进行激光中心线的提取,步骤三:补充断点和平滑曲线,步骤四:关键点的检测,步骤五:计算旋转角度;该定位方法能够快速的、准确的检测出柱体侧壁孔洞旋转角度,检测精度高,满足工业生产的要求,操作简便,实用性强。
技术研发人员:甘中学,许磊,张庆久
受保护的技术使用者:上海智殷自动化科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!