MPU的通用实时安全实现的制作方法
本公开的实施例一般涉及车载操作系统。更具体地,本公开的实施例涉及在自动驾驶车辆(adv)中的车载操作系统中实现硬实时特性的系统。
背景技术:
1、以自主模式(例如,无驾驶员)操作的车辆可以减轻乘坐者,尤其是驾驶员的一些驾驶相关的责任。当在自主模式下操作时,车辆可以使用车载传感器导航到各种位置,从而允许车辆以最小的人机交互或者在一些情况下不需要任何乘客来行驶。
2、adv包括由车载操作系统(vos)管理的许多硬件和软件组件,车载操作系统(vos)可以在一个或多个处理器单元(mpu)和一个或多个微控制器单元(mcu)上运行。一种流行的vos是linux,因为它对开发人员友好,并且易于软件迁移、扩展、修订和升级。
3、然而,linux在实时性和安全性方面不满足行业标准和认证要求,因为它是一个在对称多处理(smp)系统上的软实时操作系统,没有隔离和硬实时实现。
4、例如,对于adv的每个驱动周期(即,帧),当处理输入时,更多的应用可能超过允许的延迟。延迟在2d感知模块中是特别明显的,其可能花费的时间是所允许的延迟的两倍。
5、令人不满意的延迟一直是各公司使用不同方法为自动驾驶汽车设计专门的调度算法的动机之一。一些公司使用开源车载操作系统,其它公司使用商用车载操作系统,而其它公司使用非linux操作系统。没有一种方法是理想的。开源车载操作系统可能不符合工业标准和认证要求,商用车载操作系统可能太昂贵,并且非linux车载操作系统可能具有更多的困难和其它用于内部开发的问题。
技术实现思路
技术特征:
1.一种自动驾驶车辆adv中的多处理器单元mpu,包括:
2.如权利要求1所述的mpu,还包括:
3.如权利要求2所述的mpu,还包括:
4.如权利要求3所述的mpu,还包括:
5.如权利要求2所述的mpu,其中,在所述adv的所述一个或一个以上微控制器单元mcu上运行的所述多个任务包括:电源管理任务、温度管理任务、以及存储管理任务。
6.如权利要求2所述的mpu,其中,使用从多个adv的mpu收集的数据来训练所述一个或多个ai模型。
7.如权利要求1所述的mpu,其中,所述mpu经由进程间通信ipc与所述一个或多个mcu中的每一个通信。
8.如权利要求1所述的mpu,其中,所述虚拟机监视器是i型微内核g3虚拟机监视器。
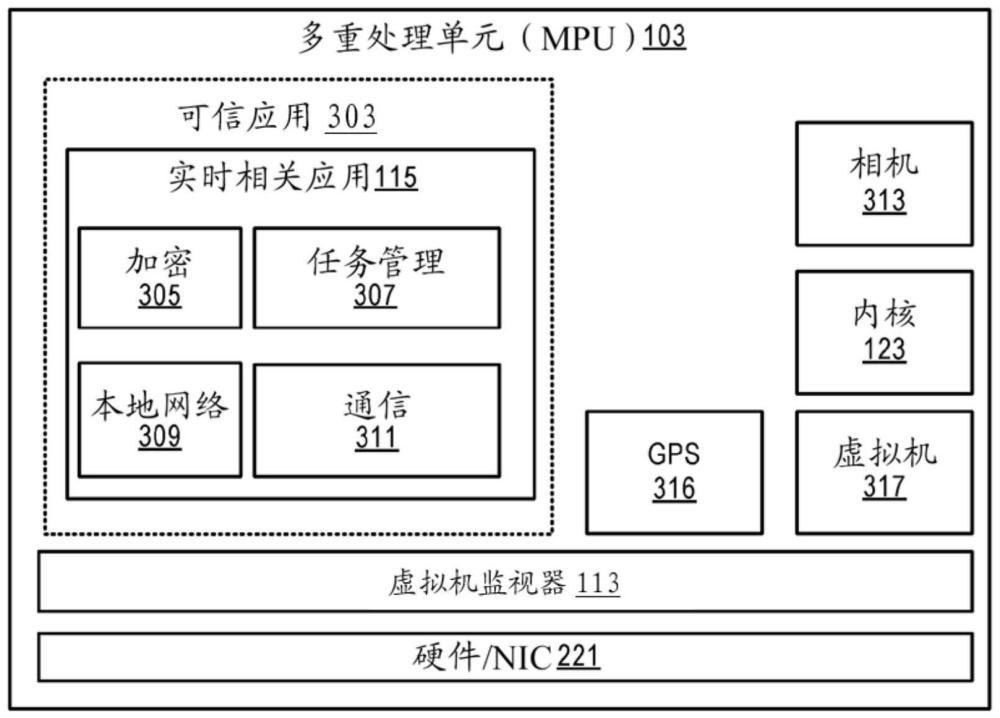
9.如权利要求1所述的mpu,其中,所述一组实时相关服务包括:网络服务、密码服务、任务管理服务、或通信服务中的一个或多个。
10.如权利要求1所述的mpu,其中,所述mpu包括所述第一组内核上的一个或多个内核级线程和一个或多个服务级线程,其中,所述一个或多个服务级线程中的每一个具有比所述一个或多个内核级线程中的每一个更高的优先级。
11.一种自动驾驶车辆adv,包括:
12.如权利要求11所述的adv,其中,所述mpu还包括:
13.如权利要求12所述的adv,其中,所述mpu还包括:
14.如权利要求13所述的adv,其中,所述mpu还包括:
15.如权利要求12所述的adv,其中,运行在所述adv的所述一个或多个微控制器单元mcu上的所述多个任务包括:电源管理任务、温度管理任务、以及存储管理任务。
16.如权利要求12所述的adv,其中,使用从多个adv的mpu收集的数据来训练所述一个或多个ai模型。
17.如权利要求11所述的adv,其中,所述mpu经由进程间通信ipc与所述一个或多个mcu中的每一个进行通信。
18.如权利要求11所述的adv,其中,所述虚拟机监视器是i型微内核g3虚拟机监视器。
19.如权利要求11所述的adv,其中,所述一组实时相关服务包括:网络服务、密码服务、任务管理服务、或通信服务中的一个或多个。
20.如权利要求11所述的adv,其中,所述mpu包括所述第一组核上的一个或多个内核级线程和一个或多个服务级线程,其中,所述一个或多个服务级线程中的每一个具有比所述一个或多个内核级线程中的每一个更高的优先级。
技术总结
自动驾驶车辆(ADV)中的多处理器单元(MPU)可以提供硬实时性能。在一个实施例中,MPU可以包括虚拟化MPU的多个核的虚拟机监视器,虚拟机监视器还可以被划分成彼此隔离的两组核。第一组核被指定直接在系统虚拟机监视器上作为可信应用程序运行实时相关服务,并且实时相关服务被给予比第一组核上的内核级线程更高的优先级。第二组核被指定来运行操作系统(例如,Linux)的内核。此外,使用硬实时开源包对内核打补丁,以实现硬实时性能。开源包可用于ADV中不同电子控制单元(ECU)之间的进程间通信(IPC)。
技术研发人员:寇浩锋,黄岱,张满江,海伦·K·潘
受保护的技术使用者:百度(美国)有限责任公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!