一种点云去噪方法、装置及电子设备与流程
本发明涉及智慧交通,特别涉及一种点云去噪方法、装置及电子设备。
背景技术:
1、点云数据具有丰富的三维信息,近年来其应用开始受到广泛重视。点云数据在使用之前往往需要进行点云去噪。点云噪声通常包含两类,第一类是三维扫描仪在扫描的过程中由于外界的因素以及仪器本身的原因造成的,第二类则是对检测对象造成干扰的事物对应的点云如背景噪声。对于第一类噪声可以利用孤立点检测、密度均值漂流聚类等方法进行去噪。对于第二类噪声则可以采用噪声分类去噪,如通过网络模型pointcleannet进行噪声分类去除。
2、具体实施过程中,本申请发明人发现在使用第一类和第二类方法进行点云去噪后,仍然存在很多不确定来源或类型的噪声,本申请将他称之为其他噪声。如何减少其他噪声对三维点云数据帧后续处理的干扰,成了点云去噪亟待攻克的一个难题。
技术实现思路
1、本发明实施例提供一种点云去噪方法、装置及电子设备,用于解决现有技术中其他噪声较多的技术问题。
2、第一方面,本申请实施例提供一种点云去噪方法,包括:
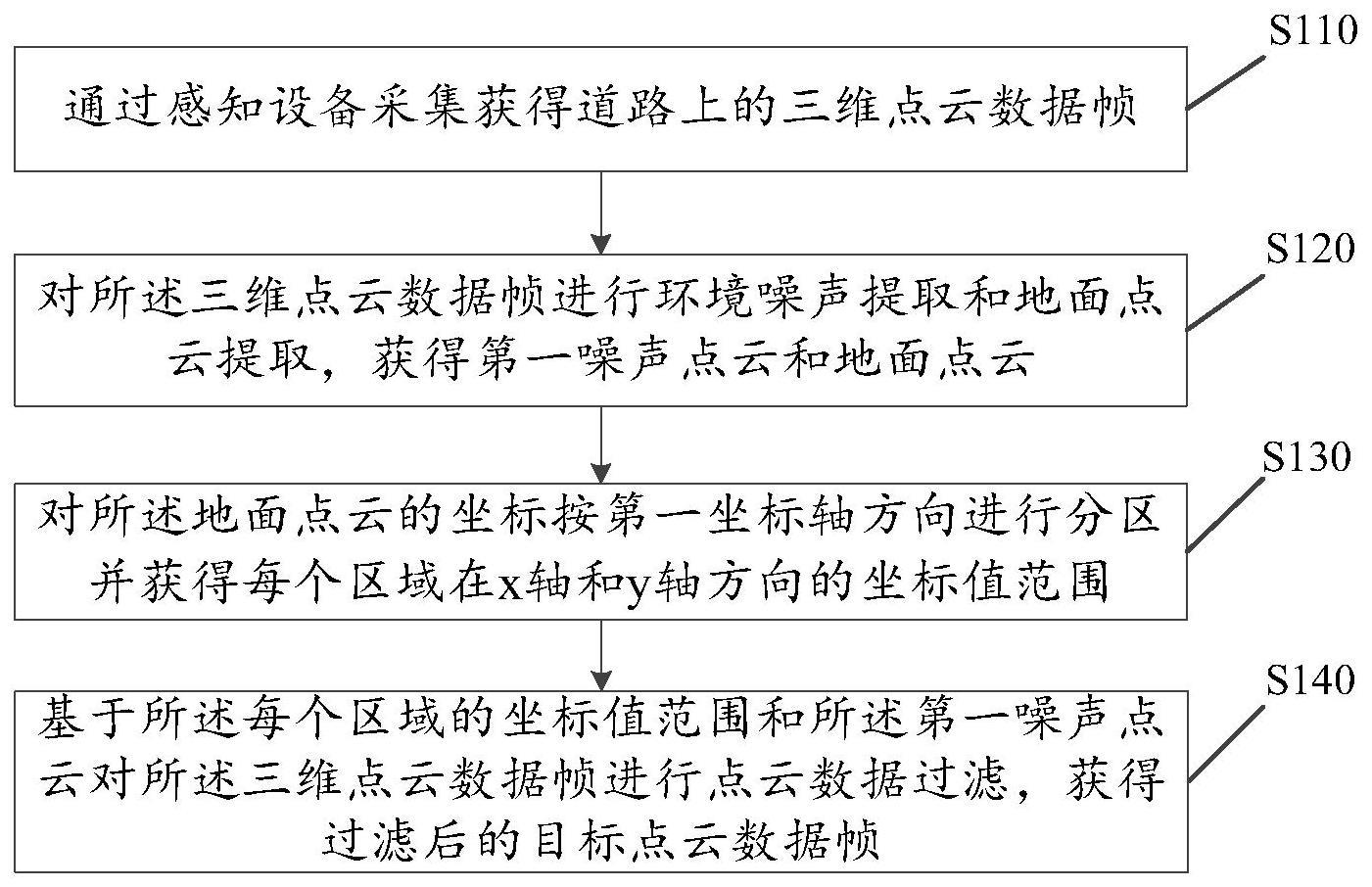
3、通过感知设备采集获得道路上的三维点云数据帧;
4、基于所述三维点云数据帧进行环境噪声提取和地面点云提取,获得第一噪声点云和地面点云;
5、对所述地面点云的坐标按第一坐标轴方向进行分区,并获得每个区域在x轴和y轴方向的坐标值范围;
6、基于所述每个区域的坐标值范围和所述第一噪声点云对所述三维点云数据帧进行点云数据过滤,获得过滤后的目标点云数据帧。
7、可选的,所述基于所述三维点云数据帧进行环境噪声提取和地面点云提取,获得第一噪声点云和地面点云,包括:
8、读取所述三维点云数据帧中z值大于预设阈值的参考点;
9、以所述参考点为上顶面中心,提取预设立方体内的所有噪声点作为所述第一噪声点云;
10、滤除所述三维点云数据帧中的所述第一噪声点云,获得第一点云数据帧;
11、对所述第一点云数据帧进行地面点云提取,获得所述地面点云。
12、可选的,所述基于所述每个区域的坐标值范围和所述第一噪声点云对所述三维点云数据帧进行点云数据过滤,获得过滤后的目标点云数据帧,包括:
13、滤除所述三维点云数据帧中的所述第一噪声点云,获得第一点云数据帧;
14、获取所述第一点云数据帧中所述每个区域内的点的x、y坐标值,过滤掉y坐标值或x坐标值不在对应区域坐标值范围内的点,获得过滤后的目标点云数据帧。
15、可选的,在所述对滤除所述第一噪声点云的第一点云数据帧进行地面点云识别之后,所述方法还包括:
16、对所述地面点云进行统计滤波或者半径滤波,获取滤波后的地面点云以及地面点云坐标。
17、可选的,所述方法还包括:
18、滤除所述目标点云数据帧中的所述地面点云,获得第二点云数据帧;
19、基于所述第二点云数据帧进行目标识别。
20、可选的,所述方法还包括:
21、对所述目标点云数据帧或者滤除地面点云后的第二点云数据帧进行检测对象标注,获得训练样本;
22、基于所述训练样本进行点云识别模型训练,获得训练好的点云识别模型。
23、第二方面,本申请实施例提供一种点云去噪装置,包括:
24、获取单元,用于通过感知设备采集获得道路上的三维点云数据帧;
25、提取单元,用于对所述三维点云数据帧进行环境噪声提取和地面点云提取,获得第一噪声点云和地面点云;
26、分区单元,用于对所述地面点云的坐标按第一坐标轴方向进行分区,并获得每个区域在x轴和y轴方向的坐标值范围;
27、过滤单元,用于基于所述每个区域的坐标值范围和所述第一噪声点云对所述三维点云数据帧进行点云数据过滤,获得过滤后的目标点云数据帧。
28、可选的,所述提取单元用于:
29、读取所述三维点云数据帧中z值大于预设阈值的参考点;
30、以所述参考点为上顶面中心,获取预设立方体内的第一噪声点云并过滤;
31、对滤除所述第一噪声点云的第一点云数据帧进行地面点云识别。
32、可选的,所述过滤单元具体用于:
33、滤除所述三维点云数据帧中的所述第一噪声点云,获得第一点云数据帧;
34、获取所述第一点云数据帧中所述每个区域内的点的x、y坐标值,过滤掉y坐标值或x坐标值不在对应区域坐标值范围内的点,获得过滤后的目标点云数据帧。
35、可选的,所述过滤单元还用于:在所述对滤除所述第一噪声点云的第一点云数据帧进行地面点云识别之后,对所述地面点云进行统计滤波或者半径滤波,获取滤波后的地面点云以及地面点云坐标。
36、可选的,所述点云去噪装置还包括识别单元,用于:
37、滤除所述目标点云数据帧中的所述地面点云,获得第二点云数据帧;
38、基于所述第二点云数据帧进行目标识别。
39、可选的,所述点云去噪装置还包括训练单元,用于:
40、对所述目标点云数据帧或者滤除地面点云后的第二点云数据帧进行检测对象标注,获得训练样本;
41、基于所述训练样本进行点云识别模型训练,获得训练好的点云识别模型。
42、第三方面,本申请实施例提供一种电子设备,包括有存储器,以及一个或者一个以上的程序,其中一个或者一个以上的程序存储于存储器中,且经配置由一个或者一个以上处理器执行所述一个或者一个以上的程序实现如第一方面所述的任一方法。
43、第四方面,本申请实施例提供一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如第一方面所述的任一方法。
44、本申请实施例中的上述一个或多个技术方案,至少具有如下技术效果:
45、本申请实施例提供一种点云去噪方法,通过感知设备采集获得道路上的三维点云数据帧;对三维点云数据帧进行环境噪声识别和地面点云识别,获得第一噪声点云和地面点云;对地面点云的坐标按第一坐标轴方向进行分区,并获得每个区域在x轴和y轴方向的坐标值范围;基于每个区域的坐标值范围和第一噪声点云对三维点云数据帧进行点云数据过滤,获得过滤后的目标点云数据帧。本申请考虑到目标对象均在道路地面活动,通过地面点云分区,利用地面各区域的点云坐标范围和环境噪声点云来快速过滤掉不易被识别的其他噪声如低矮绿植、路障等,计算量小、效率高,解决了现有技术中其他噪声较多的技术问题。
技术特征:
1.一种点云去噪方法,其特征在于,包括:
2.如权利要求1所述的点云去噪方法,其特征在于,所述基于所述三维点云数据帧进行环境噪声提取和地面点云提取,获得第一噪声点云和地面点云,包括:
3.如权利要求1所述的点云去噪方法,其特征在于,所述基于所述每个区域的坐标值范围和所述第一噪声点云对所述三维点云数据帧进行点云数据过滤,获得过滤后的目标点云数据帧,包括:
4.如权利要求2所述的点云去噪方法,其特征在于,在所述对滤除所述第一噪声点云的第一点云数据帧进行地面点云识别之后,所述方法还包括:
5.如权利要求1或3所述的点云去噪方法,其特征在于,所述方法还包括:
6.如权利要求1或3所述的点云去噪方法,其特征在于,所述方法还包括:
7.一种点云去噪装置,其特征在于,包括:
8.如权利要求7所述的点云去噪装置,其特征在于,所述提取单元用于:
9.一种电子设备,其特征在于,包括有存储器,以及一个或者一个以上的程序,其中一个或者一个以上的程序存储于存储器中,且经配置由一个或者一个以上处理器执行所述一个或者一个以上的程序实现如权利要求1-6任一所述的方法。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1-6任一所述的方法。
技术总结
本发明公开了一种点云去噪方法、装置及电子设备,该点云去噪方法包括:通过感知设备采集获得道路上的三维点云数据帧;基于所述三维点云数据帧进行环境噪声提取和地面点云提取,获得第一噪声点云和地面点云;对所述地面点云的坐标按第一坐标轴方向进行分区,并获得每个区域在x轴和y轴方向的坐标值范围;基于所述每个区域的坐标值范围和所述第一噪声点云对所述三维点云数据帧进行点云数据过滤,获得过滤后的目标点云数据帧。本方案通过地面点云分区,利用地面各区域的点云坐标范围和环境噪声点云来快速过滤掉不易被识别的其他噪声,计算量小、效率高,解决了现有技术中其他噪声较多的技术问题。
技术研发人员:候捷
受保护的技术使用者:苏州艾氪英诺机器人科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!