一种基于改进yolov3的多尺度融合叶片缺陷检测方法与流程
本发明涉及目标检测,具体涉及一种基于改进yolov3的多尺度融合叶片缺陷检测方法。
背景技术:
1、因叶片表面缺陷而造成发动机失效的比例为整个故障的75%左右。因此,对叶片裂纹缺陷进行严格的检测,对于保障飞行的安全性和可靠性极为重要。虽然国内外对叶片及表面裂纹等缺陷检测有着诸多研究,包括射线检测法,荧光磁粉检测法,孔探检测法,超声检测法,红外热成像检测法等,但其最终还是得通过人工目视检测的方法进行检测,或者简单应用计算机图像的方法进行检测,它们存在着一定的局限性,都严重依赖于检测人员的经验和技术水平,导致效率低下和错漏检事故的发生。因此,亟需开展叶片表面缺陷自动识别技术研究,提高叶片的检测效率和准确性。
2、因此,发明人提供了一种基于改进yolov3的多尺度融合叶片缺陷检测方法。
技术实现思路
1、(1)要解决的技术问题
2、本发明实施例提供了一种基于改进yolov3的多尺度融合叶片缺陷检测方法,解决了现有的叶片缺陷检测的检测效率低、准确性差的技术问题。
3、(2)技术方案
4、本发明提供了一种基于改进yolov3的多尺度融合叶片缺陷检测方法,包括以下步骤:
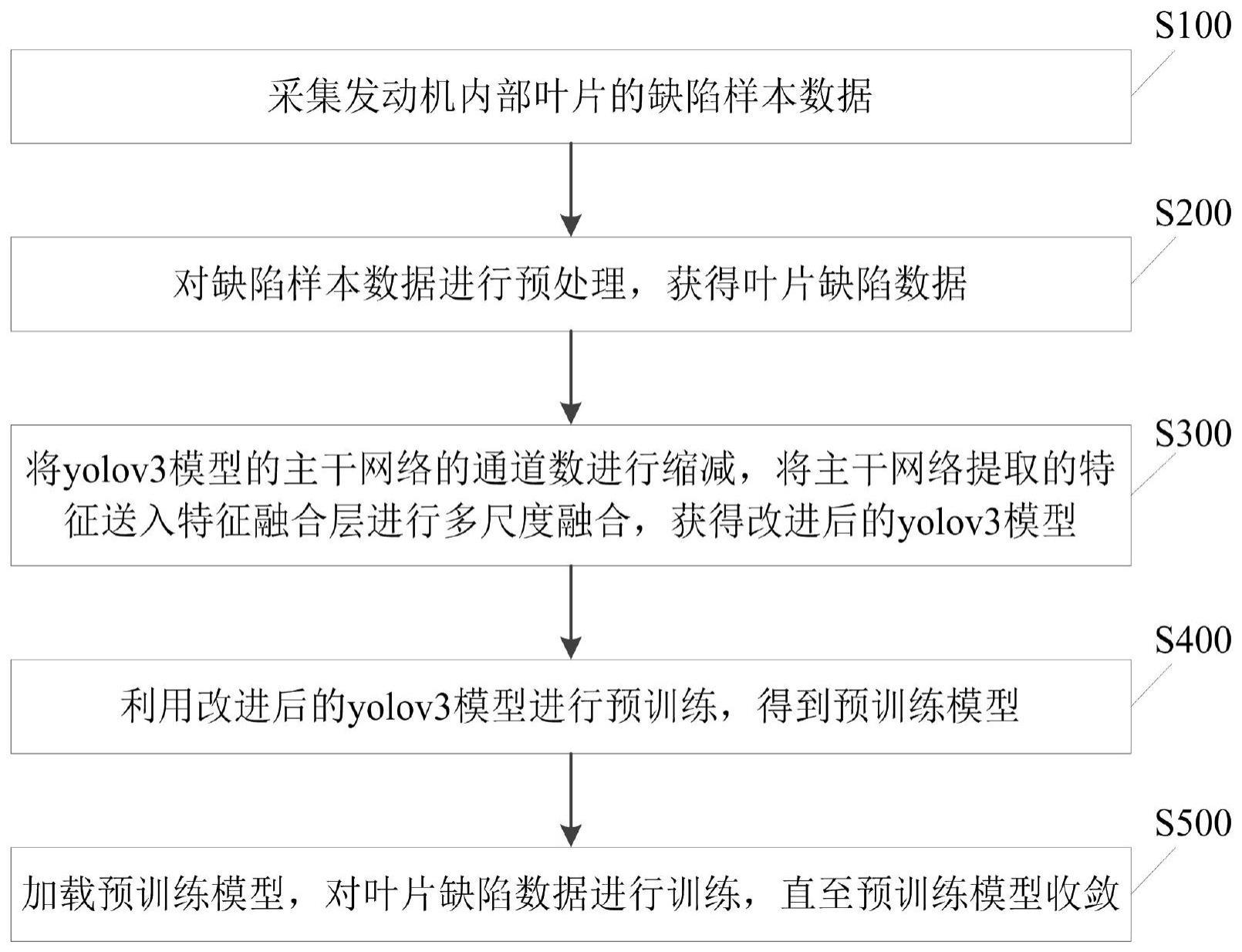
5、采集发动机内部叶片的缺陷样本数据;
6、对所述缺陷样本数据进行预处理,获得叶片缺陷数据;
7、将yolov3模型的主干网络的通道数进行缩减,将所述主干网络提取的特征送入特征融合层进行多尺度融合,获得改进后的yolov3模型;
8、利用所述改进后的yolov3模型进行预训练,得到预训练模型;
9、加载所述预训练模型,对所述叶片缺陷数据进行训练,直至所述预训练模型收敛。
10、进一步地,所述采集发动机内部叶片的缺陷样本数据,具体为:通过针探设备获取采集所述缺陷样本数据,采集类型可以是图像或视频。
11、进一步地,所述对所述缺陷样本数据进行预处理,获得叶片缺陷数据,具体为:对所述缺陷样本数据分别进行数据标注、增强及归一化处理,获得所述叶片缺陷数据。
12、进一步地,所述将所述主干网络提取的特征送入特征融合层进行多尺度融合,具体为:所述特征融合层将所述主干网络输出的特征层按照至少两种方式进行特征提取,并将处理后的结果按通道进行拼接,实现多尺度特征融合。
13、进一步地,所述特征融合层将所述主干网络输出的特征层按照至少两种方式进行特征提取,并将处理后的结果按通道进行拼接,实现多尺度特征融合,具体包括如下步骤:
14、第一方式采用输入m*m的卷积,然后串联一个n*n的卷积;
15、第二方式采用输入m*m的卷积,然后串联一个p*p的卷积;
16、所述第一方式、所述第二方式的输出通道数相同,按照层进行特征融合;
17、第三方式接入一个n*n的最大的池化层,串联一个m*m的卷积;
18、第四方式接入一个p*p的最大的池化层,串联一个m*m的卷积;
19、所述第三方式、所述第四方式的输出特征图尺寸相同,特征图边缘空白处填0处理,将这两种方式的输出按通道进行拼接;
20、将层融合结果和通道融合结果再次进行通道融合得到最后的输出层;
21、其中,m、n、p均为正整数,且m<n<p。
22、进一步地,当所述层融合结果与所述通道融合结果的层数相同时,对两种融合结果进行层融合得到所述输出层。
23、进一步地,将所述yolov3模型的边界框回归损失调整为smooth l1loss。
24、进一步地,所述利用所述改进后的yolov3模型进行预训练,得到预训练模型,具体为:使用coco2017数据集对所述改进后的yolov3模型进行预训练,得到所述预训练模型。
25、(3)有益效果
26、综上,本发明通过微调yolov3主干网络,将所有的通道数缩减,减少参数量,提高检测速度;利用通道融合和对应特征层融合的多尺度特征融合方法,为叶片缺陷检测过程提供丰富的多尺度特征,提高了准确性。
技术特征:
1.一种基于改进yolov3的多尺度融合叶片缺陷检测方法,其特征在于,该方法包括以下步骤:
2.根据权利要求1所述的基于改进yolov3的多尺度融合叶片缺陷检测方法,其特征在于,所述采集发动机内部叶片的缺陷样本数据,具体为:
3.根据权利要求1所述的基于改进yolov3的多尺度融合叶片缺陷检测方法,其特征在于,所述对所述缺陷样本数据进行预处理,获得叶片缺陷数据,具体为:
4.根据权利要求1所述的基于改进yolov3的多尺度融合叶片缺陷检测方法,其特征在于,所述将所述主干网络提取的特征送入特征融合层进行多尺度融合,具体为:所述特征融合层将所述主干网络输出的特征层按照至少两种方式进行特征提取,并将处理后的结果按通道进行拼接,实现多尺度特征融合。
5.根据权利要求4所述的基于改进yolov3的多尺度融合叶片缺陷检测方法,其特征在于,所述特征融合层将所述主干网络输出的特征层按照至少两种方式进行特征提取,并将处理后的结果按通道进行拼接,实现多尺度特征融合,具体包括如下步骤:
6.根据权利要求5所述的基于改进yolov3的多尺度融合叶片缺陷检测方法,其特征在于,当所述层融合结果与所述通道融合结果的层数相同时,对两种融合结果进行层融合得到所述输出层。
7.根据权利要求1所述的基于改进yolov3的多尺度融合叶片缺陷检测方法,其特征在于,将所述yolov3模型的边界框回归损失调整为smoothl1loss。
8.根据权利要求1所述的基于改进yolov3的多尺度融合叶片缺陷检测方法,其特征在于,所述利用所述改进后的yolov3模型进行预训练,得到预训练模型,具体为:
技术总结
本发明涉及目标检测技术领域,具体涉及一种基于改进yolov3的多尺度融合叶片缺陷检测方法。其包括步骤:采集发动机内部叶片的缺陷样本数据;对缺陷样本数据进行预处理,获得叶片缺陷数据;将yolov3模型的主干网络的通道数进行缩减,将主干网络提取的特征送入特征融合层进行多尺度融合,获得改进后的yolov3模型;利用改进后的yolov3模型进行预训练,得到预训练模型;加载预训练模型,对叶片缺陷数据进行训练,直至预训练模型收敛。该基于改进yolov3的多尺度融合叶片缺陷检测方法的目的是解决现有的叶片缺陷检测的检测效率低、准确性差的问题。
技术研发人员:王琳琳,陈毅夫,施嘲风,杨霄,任伟杰
受保护的技术使用者:中国航空工业集团公司北京航空精密机械研究所
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!