一种缺陷识别方法、装置、电子设备和存储介质与流程
本申请涉及图像处理,尤其涉及一种缺陷识别方法、装置、电子设备和存储介质。
背景技术:
1、随着自动化技术的发展,越来越多的厂商利用自动化设备进行产品的生产、仓储、运输等,在生产完成后质检过程中,利用自动化设备进行产品质量检查也越发的成为了流程中不可或缺的一步。
2、当前,针对具备棱边的相关产品进行外形检查时,通常通过3d检测算法对产品表面和棱边进行识别,并根据3d识别的点云图像对产品的表面和棱边上出现的凹凸不平进行确定,但这种传统的3d检测算法稳定性差使得检出率低,并且无法准确识别产品棱边缺陷的量化指标。
技术实现思路
1、本申请提供了一种缺陷识别方法、装置、电子设备和存储介质,以提高缺陷检测的准确性和稳定性。
2、根据本申请的一方面,提供了一种缺陷识别方法,所述方法包括:
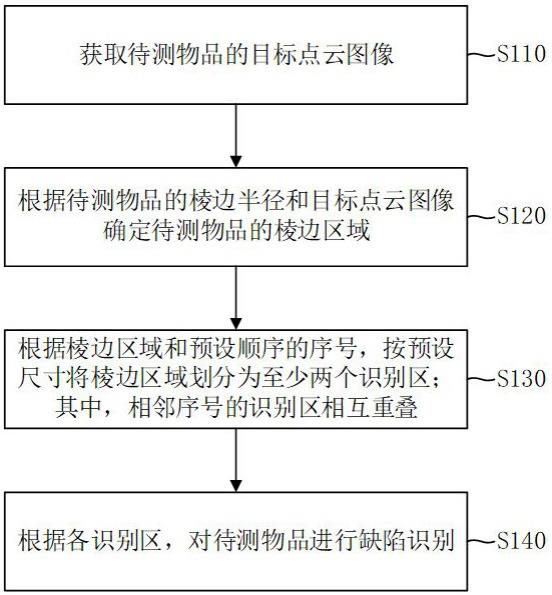
3、获取待测物品的目标点云图像;
4、根据待测物品的棱边半径和目标点云图像,确定待测物品的棱边区域;
5、根据棱边区域和预设顺序的序号,按预设尺寸将棱边区域划分为至少两个识别区;其中,相邻序号的识别区相互重叠;
6、根据各识别区,对待测物品进行缺陷识别。
7、根据本申请的另一方面,提供了一种缺陷识别装置,包括:
8、图像获取模块,用于获取待测物品的目标点云图像;
9、棱边确定模块,用于根据待测物品的棱边半径和目标点云图像,确定待测物品的棱边区域;
10、识别区划分模块,用于根据棱边区域和预设顺序的序号,按预设尺寸将棱边区域划分为至少两个识别区;其中,相邻序号的识别区相互重叠;
11、缺陷识别模块,用于根据各识别区,对待测物品进行缺陷识别。
12、根据本申请的另一方面,提供了一种电子设备,所述电子设备包括:
13、至少一个处理器;以及,
14、与所述至少一个处理器通信连接的存储器;其中,
15、所述存储器存储有可被所述至少一个处理器执行的计算机程序,所述计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行本申请任一实施例所述的缺陷识别方法。
16、根据本申请的另一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现本申请任一实施例所述的缺陷识别方法。
17、本申请实施例的技术方案,通过识别目标点云图像中的棱边区域,将棱边区域拆分成不同的识别区,且相邻识别区互相重叠,这一定程度上大大降低了因识别区的划分而导致被不同识别区拆分的缺陷不容易被识别的概率,进一步的提高了缺陷识别的准确性和稳定性。
18、应当理解,本部分所描述的内容并非旨在标识本申请的实施例的关键或重要特征,也不用于限制本申请的范围。本申请的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种缺陷识别方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述根据所述待测物品的棱边半径和所述目标点云图像,确定所述待测物品的棱边区域,包括:
3.根据权利要求2所述的方法,其特征在于,所述根据所述目标点云图像中各点云的高度值,确定所述目标点云图像对应的目标灰度图像,包括:
4.根据权利要求3所述的方法,其特征在于,所述方法包括:
5.根据权利要求4所述的方法,其特征在于,所述根据所述预设顺序的序号,将所述各识别区转换为高度坐标信息,包括:
6.根据权利要求1所述的方法,其特征在于,所述根据所述高度坐标信息和所述拟合直线,对所述待测物品进行缺陷识别,包括:
7.一种缺陷识别装置,其特征在于,包括:
8.一种电子设备,其特征在于,所述电子设备包括:
9.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现权利要求1-6中任一项所述的缺陷识别方法。
技术总结
本申请公开了一种缺陷识别方法、装置、电子设备和存储介质。具体包括:获取待测物品的目标点云图像;根据待测物品的棱边半径和目标点云图像,确定待测物品的棱边区域;根据棱边区域和预设顺序的序号,按预设尺寸将棱边区域划分为至少两个识别区;其中,相邻序号的识别区相互重叠;根据各识别区,对待测物品进行缺陷识别。本申请实施例的技术方案,通过识别目标点云图像中的棱边区域,将棱边区域拆分成不同的识别区,且相邻识别区互相重叠,这一定程度上大大降低了因识别区的划分而导致被不同识别区拆分的缺陷不容易被识别的概率,进一步的提高了缺陷识别的准确性和稳定性。
技术研发人员:曲晓春,毕文波,王连庆
受保护的技术使用者:苏州苏映视图像软件科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!