一种基于MTPA/MTPV查表稳定化及防止其动态电压饱和自适应的方法与流程
本发明涉及电机设备,具体涉及一种基于mtpa/mtpv查表稳定化及防止其动态电压饱和自适应的方法。
背景技术:
1、在乘用车应用中,车辆在行驶过程中会出现由于路面颠簸,或者机械共振等原因导致的车身抖动,继而导致驱动电机转速波动。由于控制指令信号是通过扭矩请求和实际转速共同决定,所以转速抖动会引发控制指令抖动,从而导致往复性持续抖动。解决抖动的方案有很多,包括主动阻尼和相关信号滤波等,而针对这些方案,也各有优劣,或者有需要解决的问题难点存在,例如现有技术采用低通滤波器,滤除实际转速中带来的周期性抖动分量。滤波后的转速再用来进行mtpa/mtpv软件查表;现有技术缺点为:对外界信号进行滤波,会造成动态工况的相位延迟,导致滤波后用于查表的转速变化慢于实际转速。查表所得到的指令电流工作点也与实际电机工作状态不相符,会有动态电压饱和的风险存在。
2、因此,提供一种通过计算出的滤波器延迟时间,根据实时的加速度,可以计算出延迟转速,并对查表转速进行补偿的基于mtpa/mtpv查表稳定化及防止其动态电压饱和自适应的方法,已是一个值得研究的问题。
技术实现思路
1、本发明的目的是提供一种通过计算出的滤波器延迟时间,根据实时的加速度,可以计算出延迟转速,并对查表转速进行补偿的基于mtpa/mtpv查表稳定化及防止其动态电压饱和自适应的方法。
2、本发明的目的是这样实现的:
3、一种基于mtpa/mtpv查表稳定化及防止其动态电压饱和自适应的方法,包括以下步骤:
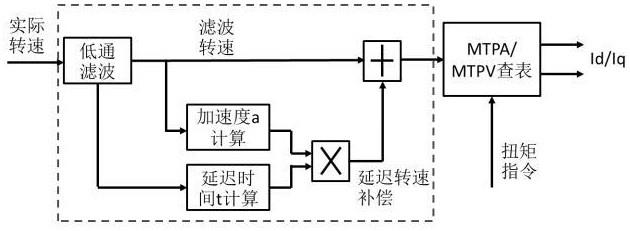
4、步骤1:通过常规低的通滤波器滤除环路扰动,根据车辆实际抖动情况,通过上位机接收到的转速信息,可以确定出转速波动周期,结合标定经验,根据现场实际滤波效果,可以确定低通滤波器截止频率f;该步骤目的是为了通过合适的低通滤波器,滤除掉转速上的抖动信号,并用滤波后的转速进行后续的mtpa/mtpv查表,消除、减弱由于转速抖动而造成的查表结果波动;
5、步骤2:通过步骤1中的滤波器的截止频率f,结合一阶低通滤波器特性,计算出系统的延迟时间t = 4/(2*π*f),同时根据滤波后的速度微分,计算出系统的加速度a,以作为步骤3实施的依据;
6、步骤3:通过步骤2延迟时间t和加速度a,得到需要补偿的系统的延迟补偿转速vc,以作为步骤4实施的依据;
7、步骤4:将步骤3中的延迟补偿转速vc与低通滤波器输出的速度vf相加,得到最终查表转速v;即得到既滤除了环路噪音,又弥补了环路延迟的查表转速。
8、所述步骤2中,利用低通滤波器输出的速度vf,计算出加速度a = dvf/dt。
9、所述步骤3中,延迟补偿转速vc的计算公式如下:vc=a*t。
10、所述步骤4中,得到最终查表转速v = vf + vc,用于mtpa/mtpv查表。
11、积极有益效果:本发明通过低通滤波器滤除存在于转速中的周期性波动分量,稳定查表效果;并通过计算出的滤波器延迟时间,根据实时的加速度,可以计算出延迟转速,并对查表转速进行补偿。弥补了滤波器所带来的动态工况的延迟,避免了电压饱和情况的发生。
技术特征:
1.一种基于mtpa/mtpv查表稳定化及防止其动态电压饱和自适应的方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的基于mtpa/mtpv查表稳定化及防止其动态电压饱和自适应的方法,其特征在于:所述步骤2中,利用低通滤波器输出的速度vf,计算出加速度a = dvf/dt。
3.根据权利要求1所述的基于mtpa/mtpv查表稳定化及防止其动态电压饱和自适应的方法,其特征在于:所述步骤3中,延迟补偿转速vc的计算公式如下:vc=a*t。
4.根据权利要求1所述的基于mtpa/mtpv查表稳定化及防止其动态电压饱和自适应的方法,其特征在于:所述步骤4中,得到最终查表转速v = vf + vc,用于mtpa/mtpv查表。
技术总结
本发明公开了一种基于MTPA/MTPV查表稳定化及防止其动态电压饱和自适应的方法,包括以下步骤:步骤1:通过常规低的通滤波器滤除环路扰动,根据车辆实际抖动情况,确定出转速波动周期,同时确定低通滤波器截止频率;步骤2:通过步骤1中的滤波器的截止频率计算出系统的延迟时间t,并计算出系统的加速度;步骤3:通过步骤2延迟时间t和加速度a,得到需要补偿的系统的延迟补偿转速Vc;步骤4:将步骤3中的延迟补偿转速Vc与低通滤波器输出的速度Vf相加,得到最终查表转速V;本发明稳定查表效果;同时弥补了滤波器所带来的动态工况的延迟,避免了电压饱和情况的发生。
技术研发人员:张筑亚,李飞,姚欣
受保护的技术使用者:河南嘉晨智能控制股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!