一种基于滑模面的飞行器末端落速落角约束制导方法及系统
本发明涉及一种飞行器末端落速落角约束制导方法及系统,具体涉及一种基于双滑模面的飞行器末端落速落角约束制导方法及系统,属于飞行器多约束制导领域。
背景技术:
1、随着现有防护工事的不断加强,飞行器末制导在保证以最小脱靶量命中目标的同时,还需要保证以特定的落角和落速击中目标要害或最脆弱的地方,以进行有效突防。现有的文献大多对末端落角进行约束,并未考虑落速约束。少数考虑落速落角约束的文献中通过采用传统偏置比例导引律实现落角控制,并通过所定义变量参数化控制飞行器的飞行速度,进而通过优化算法对参数进行寻优,以满足落速约束,但这种方法使得飞行器末制导过程复杂,增加了计算负担,导致计算时间长。
技术实现思路
1、本发明为了解决现有飞行器末制导的落速落角约束方法采用传统偏置比例导引律实现落角控制,并通过所定义变量参数化控制飞行器的飞行速度,进而通过优化算法对参数进行寻优,使得飞行器末制导过程复杂,增加了计算负担,导致计算时间长的问题,进而提出了一种基于滑模面的飞行器末端落速落角约束制导方法及系统。
2、本发明采取的技术方案是:
3、它包括以下步骤:
4、s1、构建飞行器的导弹与攻击目标的三维攻击场景;
5、s2、根据三维攻击场景构建导弹质心的运动学模型;
6、s3、根据三维攻击场景和导弹质心的运动学模型构建导弹与攻击目标的三维攻击模型;
7、s4、定义滑模面s1和滑模面s2;
8、s5、根据导弹与攻击目标的三维攻击模型、滑模面s1和滑模面s2构建满足落速落角约束的制导律;
9、s6、飞行器在进行末端飞行时,按照满足落速落角约束的制导律进行飞行,直至击打攻击目标。
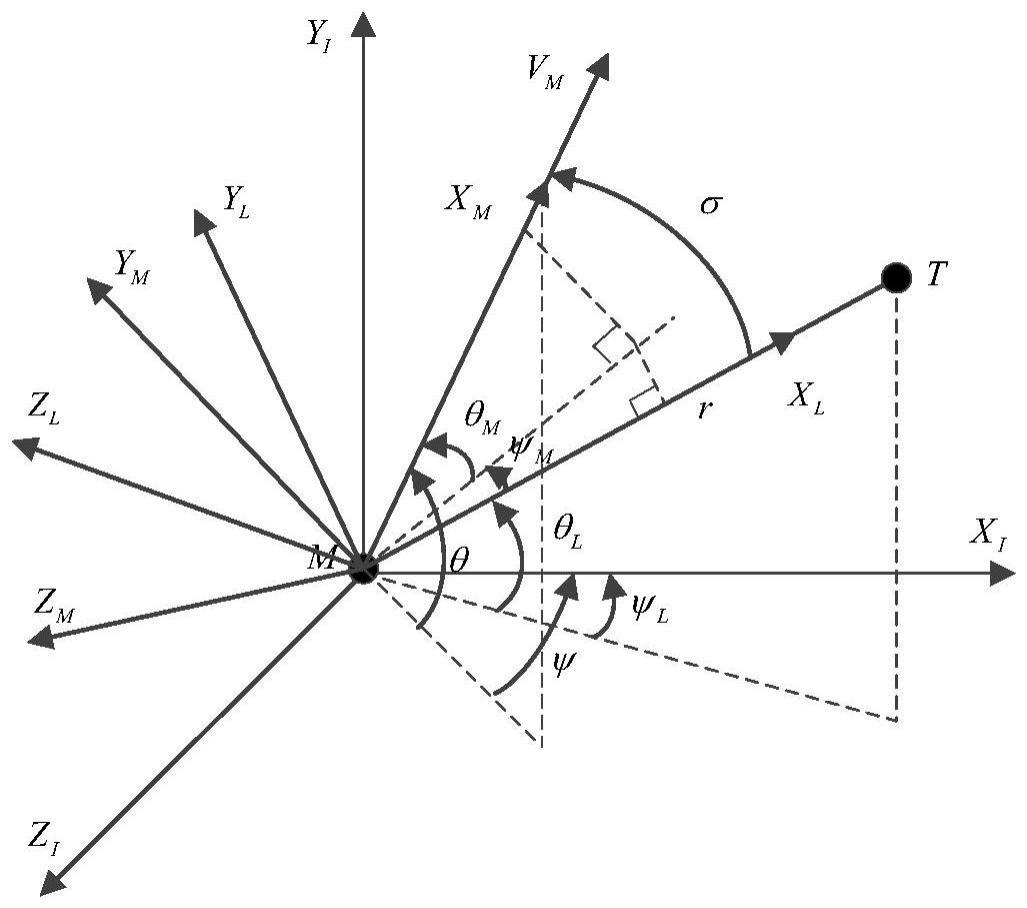
10、进一步地,所述s1中三维攻击场景包括导弹、攻击目标、惯性坐标系、视线坐标系和弹道坐标系。
11、进一步地,所述s2中导弹质心的运动学模型为:
12、
13、
14、
15、其中,x、y和z分别是导弹在惯性坐标系下的三轴位置,和分别是三轴位置的导数;vm是导弹的速度,θ是弹道倾角;ψ是弹道偏角。
16、进一步地,所述s3中导弹与攻击目标的三维攻击模型为:
17、
18、
19、
20、
21、
22、
23、其中,r是导弹和攻击目标的相对距离,θm是弹道坐标系和视线坐标系之间的俯仰前置角,ψm是弹道坐标系和视线坐标系之间的偏置前置角,θl是惯性坐标系和视线坐标系之间的俯仰视线角度,ψl是惯性坐标系和视线坐标系之间的偏航视线角度,aym是沿着弹道坐标系mym轴的加速度分量,azm是沿着弹道坐标系mzm轴的加速度分量,g是重力加速度,d是导弹所受的阻力,ρ是大气密度,s是导弹的参考面积,cd是阻力系数,m是导弹的质量,分别是r,θl,ψl,θm,ψm,vm的导数。
24、进一步地,所述s4的具体过程为:
25、定义滑模面s1
26、s1=sinθm-k1eθ (10)
27、其中,eθ是俯仰视线角跟踪误差,eθ=θl-θld,k1>0是参数,对式(10)求导可得
28、
29、将式(7)带入式(11)可得
30、
31、定义滑模面s2
32、
33、其中,eψ是偏航视线角跟踪误差,eψ=ψl-ψld,k2>0,是期望落速,对式(13)求导可得:
34、
35、将式(8)带入式(14)可得
36、
37、进一步地,所述s5中满足落速落角约束的制导律为:
38、
39、
40、其中,h0、h1、h2、h3均表示自定义的控制参数,h0>0,h1>0,h2>0,h3>0,sigγ(si)=|si|γ·sign(si),i=1,2,γ∈(0,1),sign(·)是符号函数。
41、一种基于滑模面的飞行器末端落速落角约束制导系统,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如一种基于滑模面的飞行器末端落速落角约束制导方法中的任一步骤。
42、一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如一种基于滑模面的飞行器末端落速落角约束制导方法中的任一步骤。
43、有益效果:
44、本发明通过飞行器的导弹与攻击目标的三维攻击场景构建导弹质心的运动学模型和导弹与攻击目标的三维攻击模型,确定导弹与攻击目标间的关系。定义考虑落速落角约束的制导方法在打击静止目标时的设计目标。定义了两个滑模面,分别是滑模面s1和滑模面s2。基于稳定性证明,根据导弹与攻击目标的三维攻击模型、滑模面s1和滑模面s2构建满足飞行器末制导落速落角约束的制导律,利用制导律对飞行器进行约束,改变飞行器的飞行方向及路径,以实现精准打击到攻击目标。基于设计目标对满足落速落角约束的制导律进行稳定性分析,保证飞行器的飞行状态稳定。本发明通过设置两个滑模面和制导律简化了飞行器的末制导过程,使飞行器在进行末端飞行时,仅按照满足落速落角约束的制导律进行飞行,即可满足末制导的落速落角约束,以精准、有效的打击攻击目标,在此过程中明显减少了计算的负担,缩短了计算的时间。
技术特征:
1.一种基于滑模面的飞行器末端落速落角约束制导方法,其特征在于:它包括以下步骤:
2.根据权利要求1中所述的一种基于滑模面的飞行器末端落速落角约束制导方法,其特征在于:所述s1中三维攻击场景包括导弹、攻击目标、惯性坐标系、视线坐标系和弹道坐标系。
3.根据权利要求2中所述的一种基于滑模面的飞行器末端落速落角约束制导方法,其特征在于:所述s2中导弹质心的运动学模型为:
4.根据权利要求3中所述的一种基于滑模面的飞行器末端落速落角约束制导方法,其特征在于:所述s3中导弹与攻击目标的三维攻击模型为:
5.根据权利要求4中所述的一种基于滑模面的飞行器末端落速落角约束制导方法,其特征在于:所述s4的具体过程为:
6.根据权利要求5中所述的一种基于滑模面的飞行器末端落速落角约束制导方法,其特征在于:所述s5中满足落速落角约束的制导律为:
7.一种基于滑模面的飞行器末端落速落角约束制导系统,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于:所述处理器执行所述计算机程序时实现如权利要求1-6任一所述方法的步骤。
8.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于:所述计算机程序被处理器执行时实现如权利要求1-6任一所述方法的步骤。
技术总结
一种基于滑模面的飞行器末端落速落角约束制导方法及系统,具体涉及一种基于双滑模面的飞行器末端落速落角约束制导方法及系统,为了解决现有飞行器末制导的落速落角约束方法在飞行器末制导过程复杂,增加了计算负担,导致计算时间长的问题。它根据导弹与攻击目标的三维攻击场景构建导弹质心的运动学模型和三维攻击模型;定义滑模面S<subgt;1</subgt;和滑模面S<subgt;2</subgt;;根据导弹与攻击目标的三维攻击模型、滑模面S<subgt;1</subgt;和滑模面S<subgt;2</subgt;构建满足落速落角约束的制导律;飞行器在进行末端飞行时,按照满足落速落角约束的制导律进行飞行,直至击打攻击目标。属于飞行器多约束制导领域。
技术研发人员:杨小艳,宋申民,顾振,张禹琛,王晓东
受保护的技术使用者:哈尔滨工业大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!