一种基于倾斜摄影测量的室内三维模型构建系统的制作方法
本发明涉及室内模型构建,更具体的公开了一种基于倾斜摄影测量的室内三维模型构建系统。
背景技术:
1、室内模型已经广泛的应用于房地产行业,通过对室内模型的构建,可以让人员全方位的对室内的布局进行详细的了解。而现有的室内模型构建一般通过操作人员手持扫描设备对室内进行扫描或者在室内布置vr相机来对室内的图像进行获取,然后再通过点云数据来对室内的三维模型进行构建。而由于人员手持扫描设备在对室内进行扫描的过程中,需要操作人员手持扫描设备长时间的缓慢移动扫描,大大增了操作人员的工作量,并且无法快速的对室内进行扫描建模。另外,采用vr相机对室内的图像进行获取的时候,由于vr相机拍摄出来的图像一般为球状,需要后期复杂的操作将画面校正后,才能进行建模操作,从而大大增加了建模的周期。并且采用点云数据的建模方式,点云中往往会出现噪点等情况,会导致构建出来的模型不精确,容易出现模型延伸等情况。
技术实现思路
1、本发明主要解决的技术问题是提供一种基于倾斜摄影测量的室内三维模型构建系统,能够解决以上背景技术中所存在建模周期长,建模不精确,容易出现模型延伸等情况的问题。
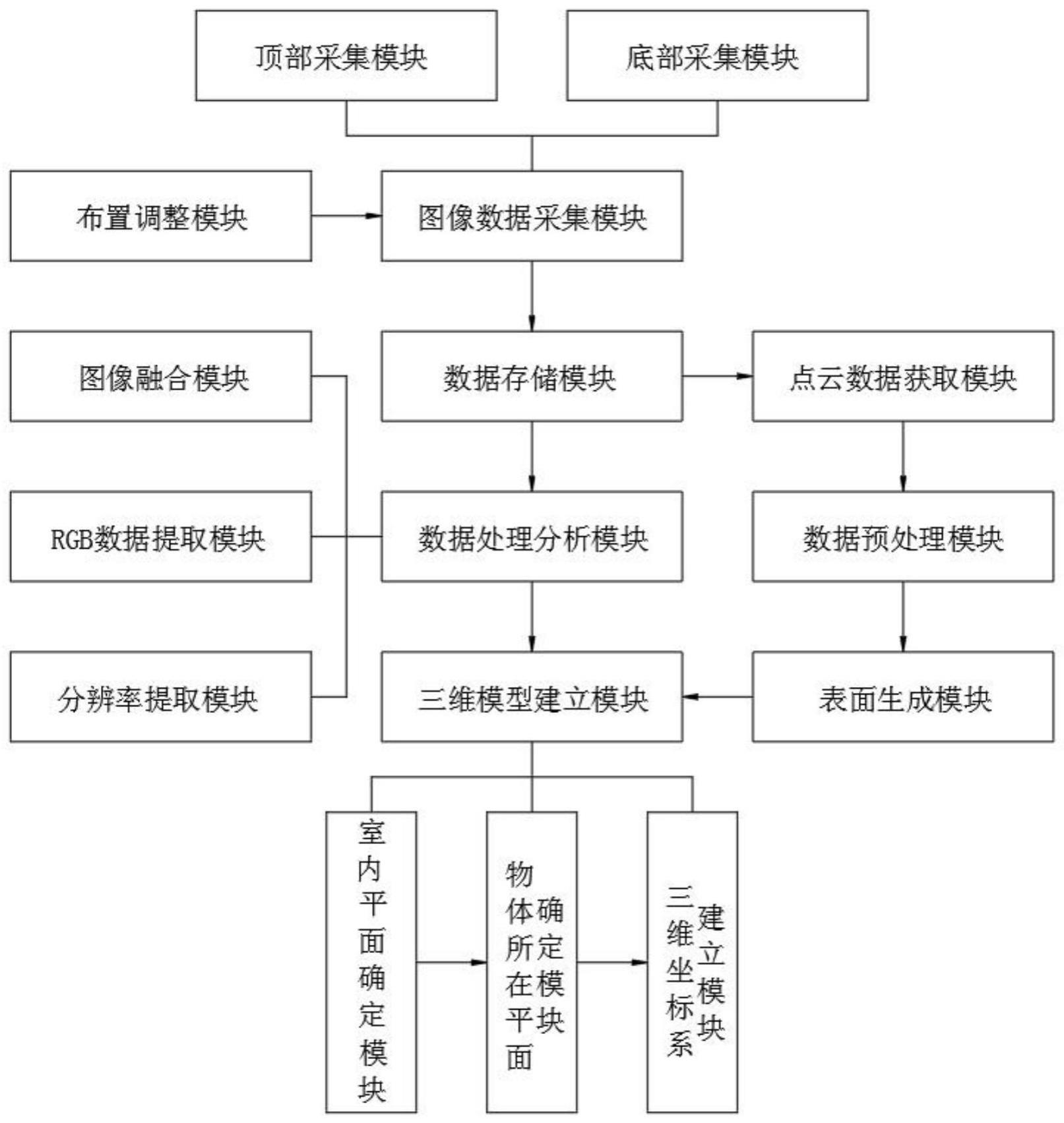
2、为解决上述技术问题,根据本发明的一个方面,更具体的说是一种基于倾斜摄影测量的室内三维模型构建系统,包括图像数据采集模块,用于对室内的图像数据进行获取采集;
3、数据存储模块,用于对图像数据采集模块采集到的室内图像数据进行存储;
4、数据处理分析模块,用于对图像数据采集模块采集到的室内图像数据进行处理分析;
5、三维模型建立模块,以数据处理分析模块处理分析后的数据作为数据基础,来对室内的三维模型进行构建。
6、更进一步的,所述图像数据采集模块包括安装于室内顶部的顶部采集模块以及安装于室内底部的底部采集模块,顶部采集模块和底部采集模块均为五高清相机构成,五高清相机以其中一个高清相机为原点,其余四高清相机环形阵列分布在中间高清相机的四周,且四周的高清相机与中间高清相机存在倾角αy。
7、更进一步的,所述系统还包括布置调整模块,其可以根据室内的高度、宽度,并通过以下公式对四周的高清相机与中间高清相机存在的倾角αy进行调整:
8、
9、其中,h为室内的高度,d为中间相机竖直中线到室内墙边之间的垂直距离;
10、四周的高清相机与中间高清相机之间的倾角αy能够根据不同的室内大小进行调节,从而可以更好的对室内的图像数据进行采集获取。
11、更进一步的,所述数据处理分析模块包括图像融合模块、rgb数据提取模块、分辨率提取模块;
12、其中,图像融合模块用于对图像采集模块采集到的图像进行融合,从而形成完整的图像数据;
13、rcb数据提取模块,可以将图像中的rgb数据进行提取,从而获得图像中不同位置的rgb数据,并进行记录保存;
14、分辨率提取模块,用于对图像采集模块采集到的图像的远、中心以及近点的分辨率进行提取,并对提取到的分辨率数据进行记录保存。
15、更进一步的,所述分辨率提取模块可以根据四周的高清相机与中间高清相机存在的倾角αy对图像采集模块采集到的图像的远、中心以及近点的分辨率进行提取,提取过程如下:
16、
17、
18、
19、其中,δ为图像数据采集模块的传感器单向元大小;h为室内的高度;βy为视场角的一半,gsdfar、gsdmid、gsdclose分别表示为图像采集模块采集到的图像的远、中心以及近点的分辨率。
20、更进一步的,所述系统还包括点云数据获取模块、数据预处理模块、表面生成模块;
21、其中,点云数据获取模块用于获取到所采集的图像数据的点云数据;
22、数据预处理模块,用于对点云数据获取模块获取到的点云数据进行预处理,从而可以得到更加精确的点云数据;
23、表面生成模块,用于根据数据预处理模块得到精确点云数据生成图像表面数据。
24、更进一步的,所述数据预处理模块的处理过程为,先通过以下公式得到点云数据的离散阈值dy:
25、
26、其中,xi、yi、zi表示为一个点云数据的三维坐标中的x、y、z轴的坐标数据,i表示为点云数据的集合;
27、再将每个点云数据与离散阈值dy进行对比,若z≤|dy-(xi+yi+zi)|≤z1,则保留该点云数据,其中z和z1分别表示为操作人员预先设定的合理性阈值,其可以根据室内空间的大小进行调整,反之,则将该点云数据删除,最终得到精确的点云数据集合。
28、更进一步的,所述三维模型建立模块包括室内平面确定模块、物体所在平面确定模块、三维坐标系建立模块;
29、其中,室内平面确定模块用于确定室内的平面信息;
30、物体所在平面确定模块,用于确定室内物体处于室内的哪一个平面上;
31、三维坐标系建立模块,在确定室内物体所在平面后,以物体所在平面的其中一个顶点为原点,并以该原点建立三维坐标,然后确定物体在三维坐标中的x,y,z数据。
32、本发明一种基于倾斜摄影测量的室内三维模型构建系统的有益效果为:本发明通过在室内的顶部和底部分别布置图像数据采集模块,并且可以根据室内的高度以及宽度能够适应性的调整图像数据采集模块周边高清相机的倾角,从而能够更加全面且清晰的对室内图像进行获取采集。
33、另外,在对数据处理分析的时候,可以将融合完成的图像总的rgb数据进行提取记录,同时可以将图像的不同点的分辨率进行提取记录,当建模完成后,再将对应的rgb数据以及不同点位的分辨率数据覆合在对应的位置上,这样可以大大减小建模过程中的数据处理量,从而能够提高建模的效率和速度。
34、此外,在建模的过程中,一边对物体的模型进行构建,另一边通过获取图像的点云数据,并对点云数据进行处理得到精确的点云数据,从而生成精确的模型表面,当模型构建完成后,将得到的模型表面覆合在构建完成的模型上,同时将模型多余出表面的位置切除,最终可以得到精确的室内模型。并且构建模型和表面生成分开进行,能够减小建模过程中的运算量,提高建模效率,同时能够生成精确的模型表面数据,最终可以得到精准的室内模型。
技术特征:
1.一种基于倾斜摄影测量的室内三维模型构建系统,其特征在于,包括图像数据采集模块,用于对室内的图像数据进行获取采集;
2.根据权利要求1所述的一种基于倾斜摄影测量的室内三维模型构建系统,其特征在于:所述图像数据采集模块包括安装于室内顶部的顶部采集模块以及安装于室内底部的底部采集模块,顶部采集模块和底部采集模块均为五高清相机构成,五高清相机以其中一个高清相机为原点,其余四高清相机环形阵列分布在中间高清相机的四周,且四周的高清相机与中间高清相机存在倾角αy。
3.根据权利要求2所述的一种基于倾斜摄影测量的室内三维模型构建系统,其特征在于:所述系统还包括布置调整模块,其可以根据室内的高度、宽度,并通过以下公式对四周的高清相机与中间高清相机存在的倾角αy进行调整:
4.根据权利要求3所述的一种基于倾斜摄影测量的室内三维模型构建系统,其特征在于:所述数据处理分析模块包括图像融合模块、rgb数据提取模块、分辨率提取模块;
5.根据权利要求4所述的一种基于倾斜摄影测量的室内三维模型构建系统,其特征在于:所述分辨率提取模块可以根据四周的高清相机与中间高清相机存在的倾角αy对图像采集模块采集到的图像的远、中心以及近点的分辨率进行提取,提取过程如下:
6.根据权利要求1所述的一种基于倾斜摄影测量的室内三维模型构建系统,其特征在于:所述系统还包括点云数据获取模块、数据预处理模块、表面生成模块;
7.根据权利要求6所述的一种基于倾斜摄影测量的室内三维模型构建系统,其特征在于:所述数据预处理模块的处理过程为,先通过以下公式得到点云数据的离散阈值dy:
8.根据权利要求1所述的一种基于倾斜摄影测量的室内三维模型构建系统,其特征在于:所述三维模型建立模块包括室内平面确定模块、物体所在平面确定模块、三维坐标系建立模块;
技术总结
本发明涉及室内模型构建技术领域,且公开了一种基于倾斜摄影测量的室内三维模型构建系统,包括图像数据采集模块,用于对室内的图像数据进行获取采集;数据存储模块,用于对图像数据采集模块采集到的室内图像数据进行存储;数据处理分析模块,用于对图像数据采集模块采集到的室内图像数据进行处理分析;三维模型建立模块,以数据处理分析模块处理分析后的数据作为数据基础,来对室内的三维模型进行构建。本发明通过在室内的顶部和底部分别布置图像数据采集模块,并且可以根据室内的高度以及宽度能够适应性的调整图像数据采集模块周边高清相机的倾角,从而能够更加全面且清晰的对室内图像进行获取采集。
技术研发人员:刘晓文,李庆明,崔殿瑞,吕伟娜
受保护的技术使用者:刘晓文
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!