轨道检测方法及设备与流程
本发明属于轨道检测,具体涉及一种轨道检测方法及设备。
背景技术:
1、目前已有能够检测轨道病害的轨道检测设备,其中,所检测的轨道病害以垂磨、侧磨和肥边这几种类型为主。图1是钢轨标准断面的示意图,如图1所示,垂磨在钢轨顶面距作用边的1/3处测量,侧磨在钢轨顶面下16mm处测量,总磨耗=垂磨+1/2侧磨,肥边是指相较于标准轮廓存在边缘突出的情况。
2、相关技术的轨道检测设备中设置有轮廓仪,用于扫描钢轨输出廓形曲线,基于廓形曲线诊断轨道病害,但是基于廓形曲线无法覆盖掉块与波磨的病害检测,需要使用好几种辅助设备,其中还包含有人工检测方式,检测方式复杂且效率较低,而且在基于廓形曲线检测病害时计算量较大,对设备的计算性能要求较高。其中,波磨是当轨道在运行一段时间以后,由于一些外部原因导致车轮与钢轨没有正确接触,从而产生了周期性的磨。掉块是在产生垂磨或肥边后,由于没有很好的检测手段来及时发现和打磨处理,从而导致磨损的加剧,这时就会产生掉块。
3、针对相关技术中的轨道病害检测不全面且计算资源消耗高的问题,目前还没有提出有效的解决方案。
技术实现思路
1、本发明是为解决上述问题而进行的,目的在于提供一种能够轨道检测方法及设备,以解决目前相关技术中轨道病害检测不全面且计算资源消耗高的问题,本发明采用了如下技术方案:
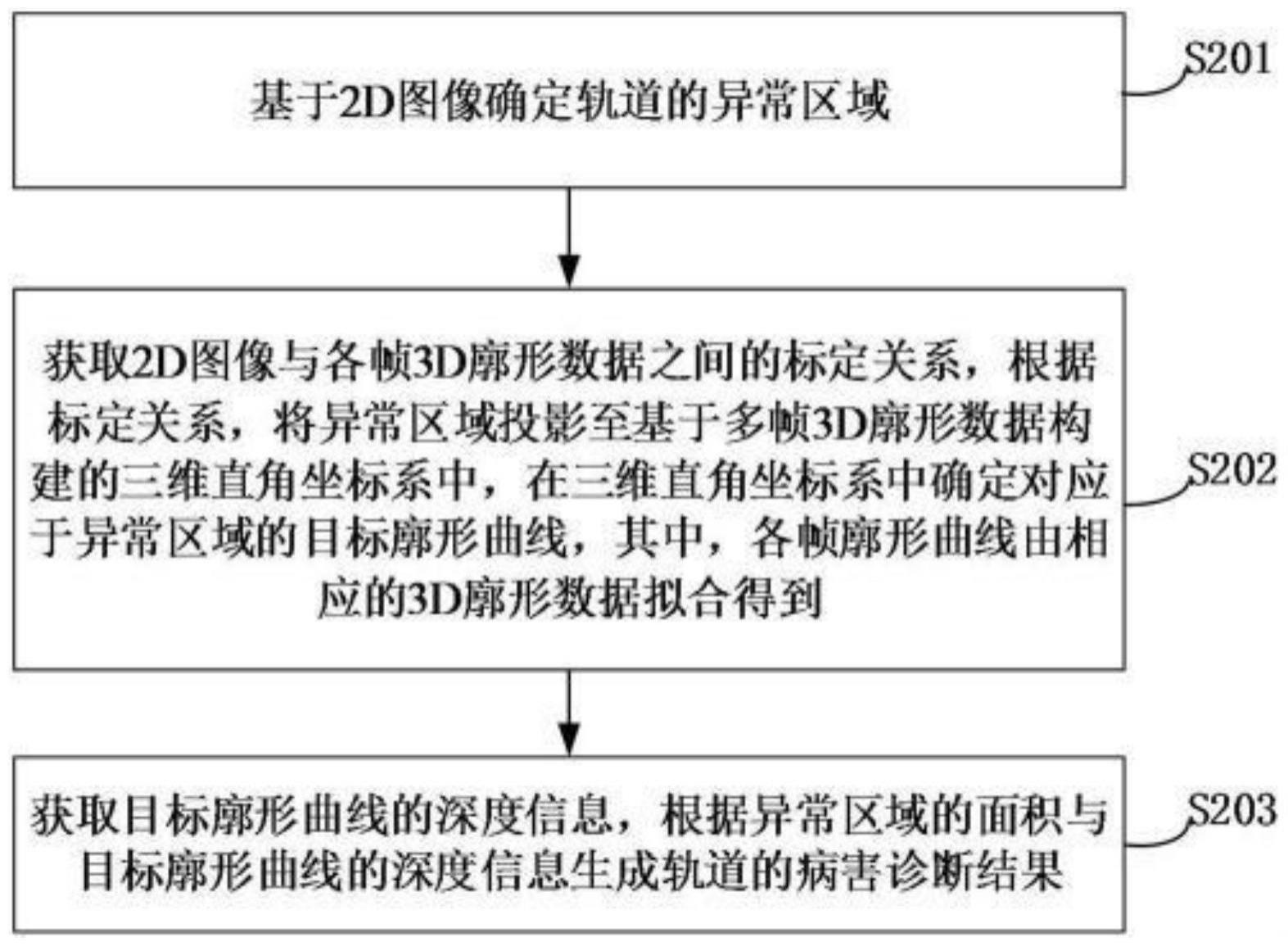
2、本发明提供了一种轨道检测方法,基于轨道的轨道图像和轨道轮廓数据对该轨道进行缺陷检测,其特征在于,包括以下步骤:步骤s201,根据预定的图像处理算法对所述轨道图像进行分析处理,并判断所述轨道上是否存在预定缺陷;步骤s202,在步骤s201判断为是时,根据所述轨道图像和所述轨道轮廓数据之间的标定关系,从所述轨道轮廓数据中提取出与有缺陷的所述轨道图像相对应的目标轮廓数据;步骤s203,根据预定的轮廓分析算法对所述目标轮廓数据进行分析,得到所述预定缺陷的信息。
3、本发明提供的轨道检测方法,还可以具有这样的技术特征,其中,所述轨道图像为二维图像,步骤s201包括以下子步骤:步骤s201-1,根据预定的图像识别算法识别所述轨道图像中所述轨道的异常区域;步骤s201-2,获取所述异常区域的二维信息,基于该二维信息从所述异常区域中筛选出若干个有效区域;步骤s201-3,基于所述预定缺陷的特征数据、各个所述有效区域的二维尺寸和/多个所述有效区域的排布判断所述轨道上是否存在所述预定缺陷。
4、本发明提供的轨道检测方法,还可以具有这样的技术特征,其中,所述预定缺陷至少包括轨面掉块、轨面波磨,步骤s201-3中,将单个的且二维尺寸大于预定值的所述有效区域判定为所述轨面掉块,将沿所述轨道的延伸方向依次排列且二维尺寸相近的多个所述有效区域判定为所述轨面波磨。
5、本发明提供的轨道检测方法,还可以具有这样的技术特征,其中,所述轨道轮廓数据为三维廓形数据,步骤s202包括以下子步骤:步骤s202-1,基于多帧所述三维廓形数据构建三维坐标系;步骤s202-2,获取所述二维图像和各帧所述三维廓形数据之间的标定关系;步骤s202-3,根据所述标定关系将所述有效区域投影至所述三维坐标系,从而在所述三维坐标系中确定与所述有效区域所对应的所述目标轮廓数据。
6、本发明提供的轨道检测方法,还可以具有这样的技术特征,其中,步骤s203包括以下子步骤:步骤s203-1,计算所述有效区域的中心坐标,并基于该中心坐标从所述目标轮廓数据中获取该有效区域的深度;步骤s203-2,将所述有效区域的二维尺寸、深度与所述预定缺陷的各个缺陷等级所对应的二维尺寸阈值、深度阈值进行比对,从而确定该预定缺陷的缺陷等级。
7、本发明提供的轨道检测方法,还可以具有这样的技术特征,其中,步骤s203-1中,以所述中心坐标为圆心,在预定范围内查找所述三维廓形数据中的最大深度值,作为识别出的所述预定缺陷的深度。
8、本发明提供的轨道检测方法,还可以具有这样的技术特征,其中,步骤s203还包括下子步骤:步骤s203-3,将识别出的所述预定缺陷的缺陷类型、缺陷等级、二维尺寸以及深度进行存储。
9、本发明提供的轨道检测方法,还可以具有这样的技术特征,还包括:步骤s200,获取所述轨道的所述轨道图像和所述轨道轮廓数据,其中,步骤s200包括以下子步骤:步骤s200-1,在沿所述轨道移动过程中,通过距离检测编码器获取行走距离,基于所述行走距离,每行走第一距离通过图像获取单元单元获取所述轨道图像,每行走第二距离通过轮廓获取单元获取所述轨道轮廓数据;步骤s200-2,分别对所述轨道图像和所述轨道轮廓数据进行预处理;步骤s200-3,将预处理后的所述所述轨道图像和所述轨道轮廓数据进行暂存。
10、本发明提供的轨道检测方法,还可以具有这样的技术特征,其中,所述轮廓获取单元包括多个线激光传感器,沿所述轨道周向地排列,其投射的线激光平面均共面,且与所述轨道的一个断面共面,每个线激光传感器用于获取所述轨道的部分廓形线,步骤s200-2中,将属于同一个断面的多道所述部分廓形线进行拼接,得到该断面的整体廓形线,并对所述整体廓形线进行有效数据提取,得到线条清晰的所述整体廓形线,所述轨道轮廓数据包括多道所述整体廓形线。
11、本发明提供了一种轨道检测设备,可移动地载置在轨道上,用于对该轨道进行检测,其特征在于,包括:至少一个距离检测单元,在所述轨道检测设备沿所述轨道移动时获取相应的行走距离;至少一个图像获取单元,用于获取所述轨道的轨道图像;至少一个轮廓获取单元,用于获取所述轨道的轨道轮廓数据;检测部件控制部,用于控制所述图像获取单元获取所述轨道图像,并控制所述轮廓获取单元获取所述轨道轮廓数据;计算分析部,基于所述行走距离、所述轨道图像以及所述轨道轮廓数据进行计算分析,其包括:暂存单元,对所述行走距离、所述轨道图像以及所述轨道轮廓数据进行暂存;图像分析判定单元,根据预定的图像处理算法对所述轨道图像进行图像分析处理,并判断所述轨道上是否存在预定缺陷;以及轮廓分析单元,在所述图像分析判定单元判断为是时,根据所述轨道图像和所述轨道轮廓数据之间的标定关系,从所述轨道轮廓数据中提取出与有缺陷的所述轨道图像相对应的目标轮廓数据,并根据预定的轮廓分析算法对所述轨道轮廓数据进行分析,得到所述预定缺陷的信息。
12、发明作用与效果
13、根据发明提供的轨道检测方法及设备,先对轨道图像进行分析处理,基于轨道图像判定轨道上存在预定类型的缺陷后,再提取与有缺陷的轨道图像所对应的部分轨道轮廓数据进行分析,得到进一步的缺陷信息,也就是说,利用轨道图像来进行预判,仅在预判存在缺陷时提取部分的轨道轮廓数据进行分析,而不需要对所有大量的轨道轮廓数据均进行计算分析,在实现有效的轨道检测的同时能够减小计算量、加快检测速度,解决了现有技术中轨道检测方法由于计算资源消耗高而应用受限的问题。
技术特征:
1.一种轨道检测方法,基于轨道的轨道图像和轨道轮廓数据对该轨道进行缺陷检测,其特征在于,包括以下步骤:
2.根据权利要求1所述的轨道检测方法,其特征在于:
3.根据权利要求2所述的轨道检测方法,其特征在于:
4.根据权利要求2所述的轨道检测方法,其特征在于:
5.根据权利要求4所述的轨道检测方法,其特征在于:
6.根据权利要求5所述的轨道检测方法,其特征在于:
7.根据权利要求5所述的轨道检测方法,其特征在于:
8.根据权利要求1所述的轨道检测方法,其特征在于,还包括:
9.根据权利要求8所述的轨道检测方法,其特征在于:
10.一种轨道检测设备,可移动地载置在轨道上,用于对该轨道进行检测,其特征在于,包括:
技术总结
本发明提供一种轨道检测方法及设备,先对轨道图像进行分析处理,基于轨道图像判定轨道上存在预定类型的缺陷后,再提取与有缺陷的轨道图像所对应的部分轨道轮廓数据进行分析,得到进一步的缺陷信息,也就是说,利用轨道图像来进行预判,仅在预判存在缺陷时提取部分的轨道轮廓数据进行分析,而不需要对所有大量的轨道轮廓数据均进行计算分析,在实现有效的轨道检测的同时能够减小计算量、加快检测速度,解决了现有技术中轨道检测方法由于计算资源消耗高而应用受限的问题。
技术研发人员:张长领,黄珂,曹飞,党中华,汤强,王海涛,项昶斌,王新菊,牛检伟
受保护的技术使用者:浙江银轮智能装备有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!