一种在线标定外参的方法、装置与流程
本申请涉及计算机视觉,尤其涉及一种在线标定外参的方法、装置、电子设备及机器可读存储介质。
背景技术:
1、目前在自动驾驶设备或者机器人设备上普遍装配有多种型号的传感器,其中最常见的是激光雷达和相机。当激光雷达和相机联合使用时,需要对它们之间的时空外参进行标定。目前比较流行的标定方案是离线进行,在特定的场景下使用标定板进行共视,提取标定板的边缘特征进行pnp求解(即透视n点问题求解,perspective-n-point求解);或者使用手眼标定的方法,通过计算激光雷达和相机各自的运动轨迹的位姿,使用经典的ax=xb手眼标定方程进行求解外参。这些标定方案都是离线方式进行,需要在特定布置的场景中进行操作。随着自动驾驶或者机器人设备的长时间运动,激光雷达和相机之间会发生相对运动,导致外参发生改变,之前离线标定的外参将无法准确应用,因此可能需要重新进行标定。此外,目前流行的手眼标定等方法无法解决激光雷达和相机之间时间戳不同步的问题。由于时间戳的不稳定性,必须使用在线标定的方法来处理这种情况。
2、因此,如何有效的解决离线标定无法长时间使用,以及解决时间戳不同步的问题是本领域技术人员亟待解决的技术问题。
技术实现思路
1、本申请提供一种在线标定外参的方法,所述方法包括:
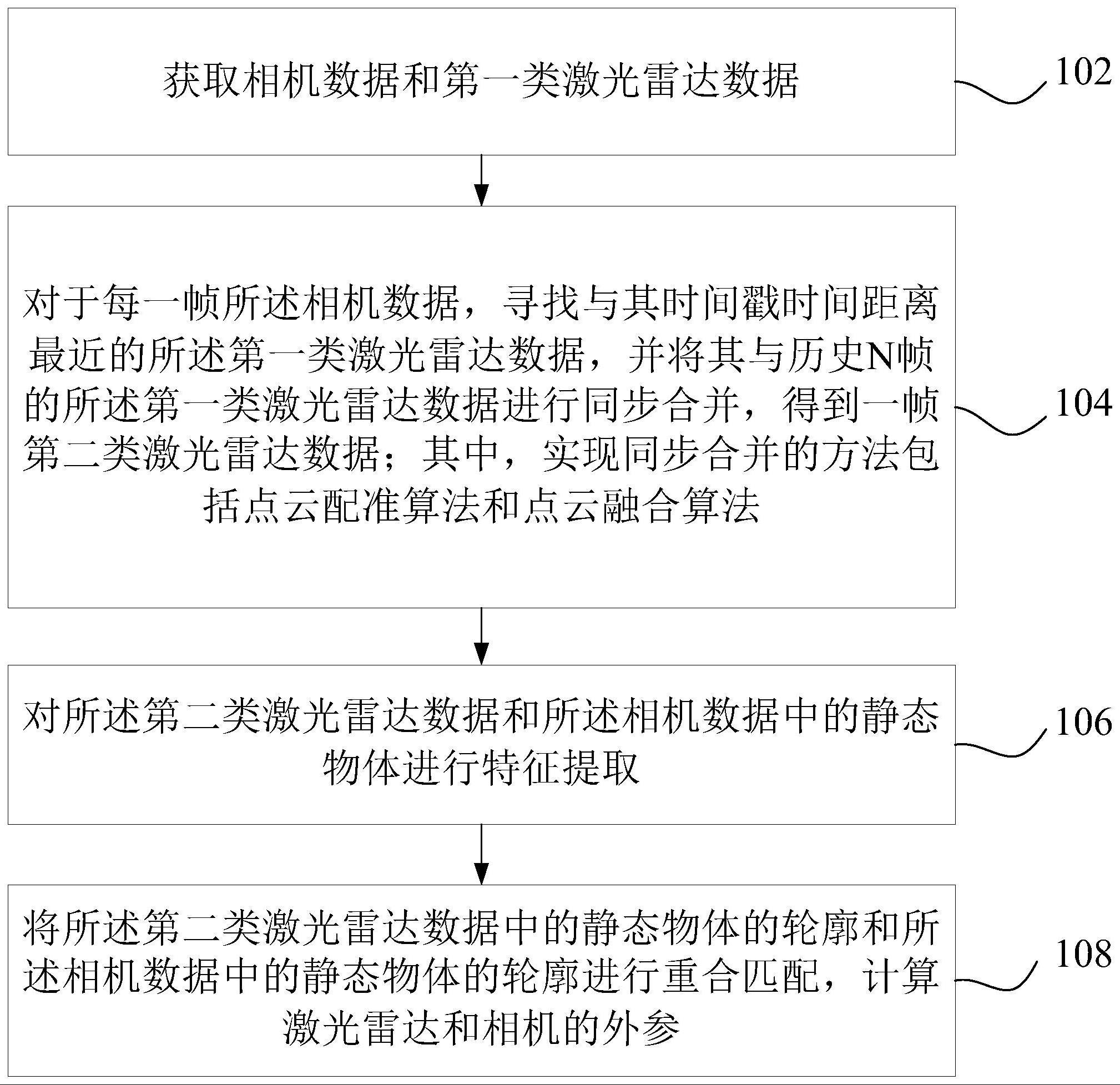
2、获取相机数据和第一类激光雷达数据;
3、对于每一帧所述相机数据,寻找与其时间戳时间距离最近的所述第一类激光雷达数据,并将其与历史n帧的所述第一类激光雷达数据进行同步合并,得到一帧第二类激光雷达数据;其中,实现同步合并的方法包括点云配准算法和点云融合算法
4、对所述第二类激光雷达数据和所述相机数据中的静态物体进行特征提取;
5、将所述第二类激光雷达数据中的静态物体的轮廓和所述相机数据中的静态物体的轮廓进行重合匹配,计算激光雷达和相机的外参。
6、可选的,所述获取相机数据和第一类激光雷达数据,包括:
7、获取相机数据和第一类激光雷达数据,对所述第一类激光雷达数据进行slam操作,计算每一帧第一类激光雷达数据的位姿,所述位姿包含旋转信息和位移信息。
8、可选的,所述将所述第二类激光雷达数据中的静态物体的轮廓和所述相机数据中的静态物体的轮廓进行重合匹配,包括:
9、将所述第二类激光雷达数据中的静态物体的轮廓和所述相机数据中的静态物体的轮廓进行匹配,找到相互对应的特征点;
10、基于所述对应的特征点,计算激光雷达和相机之间的外参信息,包括旋转和位移;
11、根据计算得到的外参信息,将所述第二类激光雷达数据中的静态物体的轮廓进行变换,并将其对齐到所述相机数据中的静态物体的轮廓上。
12、可选的,所述对所述第二类激光雷达数据和所述相机数据中的静态物体进行特征提取,包括:
13、对所述第二类激光雷达数据和所述相机数据中的车道线进行特征提取。
14、本申请提供一种在线标定外参的装置,所述装置包括:
15、数据获取模块,用于获取相机数据和第一类激光雷达数据;
16、数据融合模块,用于对于每一帧所述相机数据,寻找与其时间戳时间距离最近的所述第一类激光雷达数据,并将其与历史n帧的所述第一类激光雷达数据进行同步合并,得到一帧第二类激光雷达数据;
17、特征提取模块,用于对所述第二类激光雷达数据和所述相机数据中的静态物体进行特征提取;
18、外参计算模块,用于将所述第二类激光雷达数据中的静态物体的轮廓和所述相机数据中的静态物体的轮廓进行重合匹配,计算激光雷达和相机的外参。
19、可选的,所述获取相机数据和第一类激光雷达数据,包括:
20、获取相机数据和第一类激光雷达数据,对所述第一类激光雷达数据进行slam操作,计算每一帧第一类激光雷达数据的位姿,所述位姿包含旋转信息和位移信息。
21、可选的,所述将所述第二类激光雷达数据中的静态物体的轮廓和所述相机数据中的静态物体的轮廓进行重合匹配,包括:
22、将所述第二类激光雷达数据中的静态物体的轮廓和所述相机数据中的静态物体的轮廓进行匹配,找到相互对应的特征点;
23、基于所述对应的特征点,计算激光雷达和相机之间的外参信息,包括旋转和位移;
24、根据计算得到的外参信息,将所述第二类激光雷达数据中的静态物体的轮廓进行变换,并将其对齐到所述相机数据中的静态物体的轮廓上。
25、可选的,所述对所述第二类激光雷达数据和所述相机数据中的静态物体进行特征提取,包括:
26、对所述第二类激光雷达数据和所述相机数据中的车道线进行特征提取。
27、本申请还提供一种电子设备,包括:
28、处理器;
29、用于存储处理器可执行指令的存储器;
30、其中,所述处理器通过运行所述可执行指令以实现上述方法的步骤。
31、本申请还提供一种机器可读存储介质,其上存储有计算机指令,该指令被处理器执行时实现上述方法的步骤。
32、通过找到时间戳时间距离最近的第一类激光雷达数据,可以实现相机和激光雷达之间的时间同步,确保它们在同一时刻获取的数据能够对应;通过对第二类激光雷达数据和相机数据中的静态物体进行特征提取,并将其轮廓进行重合匹配,可以获得激光雷达和相机之间的对应关系,从而计算它们之间的外参关系,并且可以减少动态物体对特征轮廓对齐的影响。
33、以上实施例可以带来更准确的时间同步、更完整的激光雷达数据、更精准的外参计算,从而提高自动驾驶、机器人等设备在复杂环境中的感知和定位性能。
技术特征:
1.一种在线标定外参的方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述获取相机数据和第一类激光雷达数据,包括:
3.根据权利要求1所述的方法,其特征在于,所述将所述第二类激光雷达数据中的静态物体的轮廓和所述相机数据中的静态物体的轮廓进行重合匹配,包括:
4.根据权利要求1所述的方法,其特征在于,所述对所述第二类激光雷达数据和所述相机数据中的静态物体进行特征提取,包括:
5.一种在线标定外参的装置,其特征在于,所述装置包括:
6.根据权利要求5所述的装置,其特征在于,所述获取相机数据和第一类激光雷达数据,包括:
7.根据权利要求5所述的装置,其特征在于,其特征在于,所述将所述第二类激光雷达数据中的静态物体的轮廓和所述相机数据中的静态物体的轮廓进行重合匹配,包括:
8.根据权利要求5所述的装置,其特征在于,所述对所述第二类激光雷达数据和所述相机数据中的静态物体进行特征提取,包括:
9.一种机器可读存储介质,其上存储有计算机指令,该指令被处理器执行时实现如权利要求1-4中任一项所述方法的步骤。
10.一种电子设备,包括:
技术总结
本申请提供一种在线标定外参的方法、装置、电子设备及机器可读存储介质,所述方法包括:获取相机数据和第一类激光雷达数据;对于每一帧所述相机数据,寻找与其时间戳时间距离最近的所述第一类激光雷达数据,并将其与历史N帧的所述第一类激光雷达数据进行同步合并,得到一帧第二类激光雷达数据;其中,实现同步合并的方法包括点云配准算法和点云融合算法;对所述第二类激光雷达数据和所述相机数据中的静态物体进行特征提取;将所述第二类激光雷达数据中的静态物体的轮廓和所述相机数据中的静态物体的轮廓进行重合匹配,计算激光雷达和相机的外参。
技术研发人员:焦江磊,郭林栋,刘羿,何贝
受保护的技术使用者:斯乾(上海)科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!