目标检测方法、装置、电子设备及机器可读存储介质与流程
本申请涉及数据处理,尤其涉及一种目标检测方法、装置、电子设备及机器可读存储介质。
背景技术:
1、transformer(一种网络结构)结构在2d检测任务中已经取得了优异的表现,并已经领先了许多基于cnn(convolutional neural networks,卷积神经网络)的检测算法,而相比于2d任务,由于激光雷达点云数据存在的不规则、无结构和稀疏等特性,transformer结构可以在3d检测任务中展现出更大的潜力。
技术实现思路
1、有鉴于此,本申请提供一种目标检测方法、装置、电子设备及机器可读存储介质,以优化目标检测性能。
2、具体地,本申请是通过如下技术方案实现的:
3、根据本申请实施例的第一方面,提供一种目标检测方法,包括:
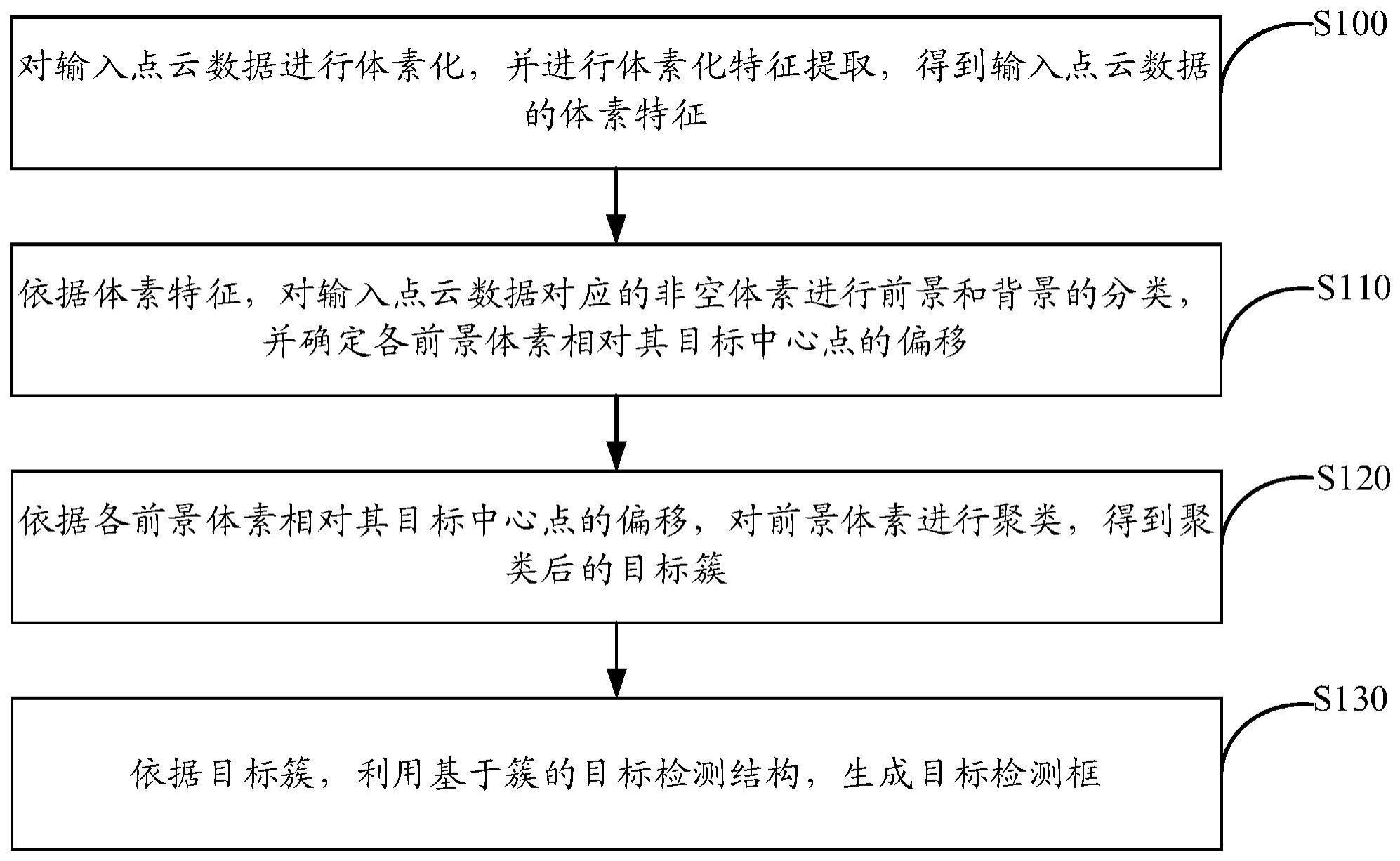
4、对输入点云数据进行体素化,并进行体素化特征提取,得到输入点云数据的体素特征;
5、依据所述体素特征,对所述输入点云数据对应的非空体素进行前景和背景的分类,并确定各前景体素相对其目标中心点的偏移;
6、依据各前景体素相对其目标中心点的偏移,对前景体素进行聚类,得到聚类后的目标簇;
7、依据所述目标簇,利用基于簇的目标检测结构,生成目标检测框。
8、根据本申请实施例的第二方面,提供一种目标检测装置,包括:
9、体素特征提取单元,用于对输入点云数据进行体素化,并进行体素化特征提取,得到输入点云数据的体素特征;
10、分类单元,用于依据所述体素特征,对所述输入点云数据对应的非空体素进行前景和背景的分类;
11、确定单元,用于确定各前景体素相对其目标中心点的偏移;
12、聚类单元,用于依据各前景体素相对其目标中心点的偏移,对前景体素进行聚类,得到聚类后的目标簇;
13、目标检测单元,用于依据所述目标簇,利用基于簇的目标检测结构,生成目标检测框。
14、根据本申请实施例的第三方面,提供一种电子设备,包括处理器和存储器,所述存储器存储有能够被所述处理器执行的机器可执行指令,所述处理器用于执行机器可执行指令,以实现第一方面提供的方法。
15、根据本申请实施例的第四方面,提供一种机器可读存储介质,所述机器可读存储介质内存储有机器可执行指令,所述机器可执行指令被处理器执行时实现第一方面提供的方法。
16、本申请提供的技术方案至少可以带来以下有益效果:
17、通过对输入点云数据进行体素化,并进行体素化特征提取,得到输入点云数据的体素特征,依据得到的体素特征,对输入点云数据对应的非空体素进行前景和背景的分类,并确定各前景体素相对其目标中心点的偏移,依据各前景体素相对其目标中心点的偏移,对前景体素进行聚类,得到聚类后的目标簇,进而,依据目标簇,利用基于簇的目标检测结构,生成目标检测框,避免了对特征进行bev空间转换,从而,减少了空特征的引入,有效避免了对特征的稀疏性的破坏,提升了目标检测效率,改善了目标检测性能。
技术特征:
1.一种目标检测方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述依据各前景体素相对其目标中心点的偏移,对前景体素进行聚类,包括:
3.根据权利要求1所述的方法,其特征在于,所述目标检测结构为transformer结构;
4.根据权利要求3所述的方法,其特征在于,所述基于簇的transformer结构中每个decoder包括互注意力层和自注意力层;
5.根据权利要求4所述的方法,其特征在于,所述依据与输入的query归属同一目标簇的键key特征和值value特征,对所输入的query进行更新,包括:
6.根据权利要求4所述的方法,其特征在于,所述基于簇的transformer解码层decoder结构包括多个decoder;
7.根据权利要求4所述的方法,其特征在于,所述基于簇的transformer解码层decoder结构包括多个decoder;
8.根据权利要求7所述的方法,其特征在于,所述依据该decoder输出的更新后的query对同一目标簇内的key特征和value特征进行更新,包括:
9.一种目标检测装置,其特征在于,包括:
10.根据权利要求9所述的装置,其特征在于,所述聚类单元依据各前景体素相对其目标中心点的偏移,对前景体素进行聚类,包括:
11.一种电子设备,其特征在于,包括处理器和存储器,所述存储器存储有能够被所述处理器执行的机器可执行指令,所述处理器用于执行机器可执行指令,以实现如权利要求1-8任一项所述的方法。
12.一种机器可读存储介质,其特征在于,所述机器可读存储介质内存储有机器可执行指令,所述机器可执行指令被处理器执行时实现如权利要求1-8任一项所述的方法。
技术总结
本申请提供一种目标检测方法、装置、电子设备及机器可读存储介质,该方法包括:对输入点云数据进行体素化,并进行体素化特征提取,得到输入点云数据的体素特征;依据所述体素特征,对所述输入点云数据对应的非空体素进行前景和背景的分类,并确定各前景体素相对其目标中心点的偏移;依据各前景体素相对其目标中心点的偏移,对前景体素进行聚类,得到聚类后的目标簇;依据所述目标簇,利用基于簇的目标检测结构,生成目标检测框。该方法可以提升目标检测效率,改善目标检测性能。
技术研发人员:裴宇,李昊,赵显
受保护的技术使用者:上海高德威智能交通系统有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!