一种关键点特征匹配的轨道区域及轨道线检测方法及系统
本发明涉及轨道检测的,尤其涉及一种关键点特征匹配的轨道区域及轨道线检测方法及系统。
背景技术:
1、近些年,随着轨道交通的迅猛发展,铁路里程不断增加,铁路覆盖范围扩大,使得铁路轨道区受到异物入侵的问题较多,目前,一些基于图像或视频的铁路入侵异物检测方法得到了应用,基于深度学习的图像或视频检测技术正慢慢成为铁路安全监测的重要组成部分。在检测过程中,轨道区域及轨道线的准确识别是关键环节。
2、而现有的轨道线检测技术对于轨道区域检测并不完整,只是用简单的直线检测,轨道线检测也不准确、轨道线提取时易受其它线条干扰,导致检测准确率不高的问题。
技术实现思路
1、本部分的目的在于概述本发明的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本申请的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
2、鉴于上述现有轨道区域及轨道线检测存在不完整、不准确、易受到干扰的问题,提出了本发明。
3、因此,本发明目的是提供一种关键点特征匹配的轨道区域及轨道线检测方法及系统,其目的在于:使用图像特征匹配的方法,将包含多元信息的图像进行关键点匹配,缩小检测范围,实现信息识别与整合,进而实现对轨道区域的准确检测;通过滑窗检测的方式,分割检测区域,对每个区域依次进行检测,进而提升轨道线的检测准确率。
4、为解决上述技术问题,本发明提供如下技术方案:
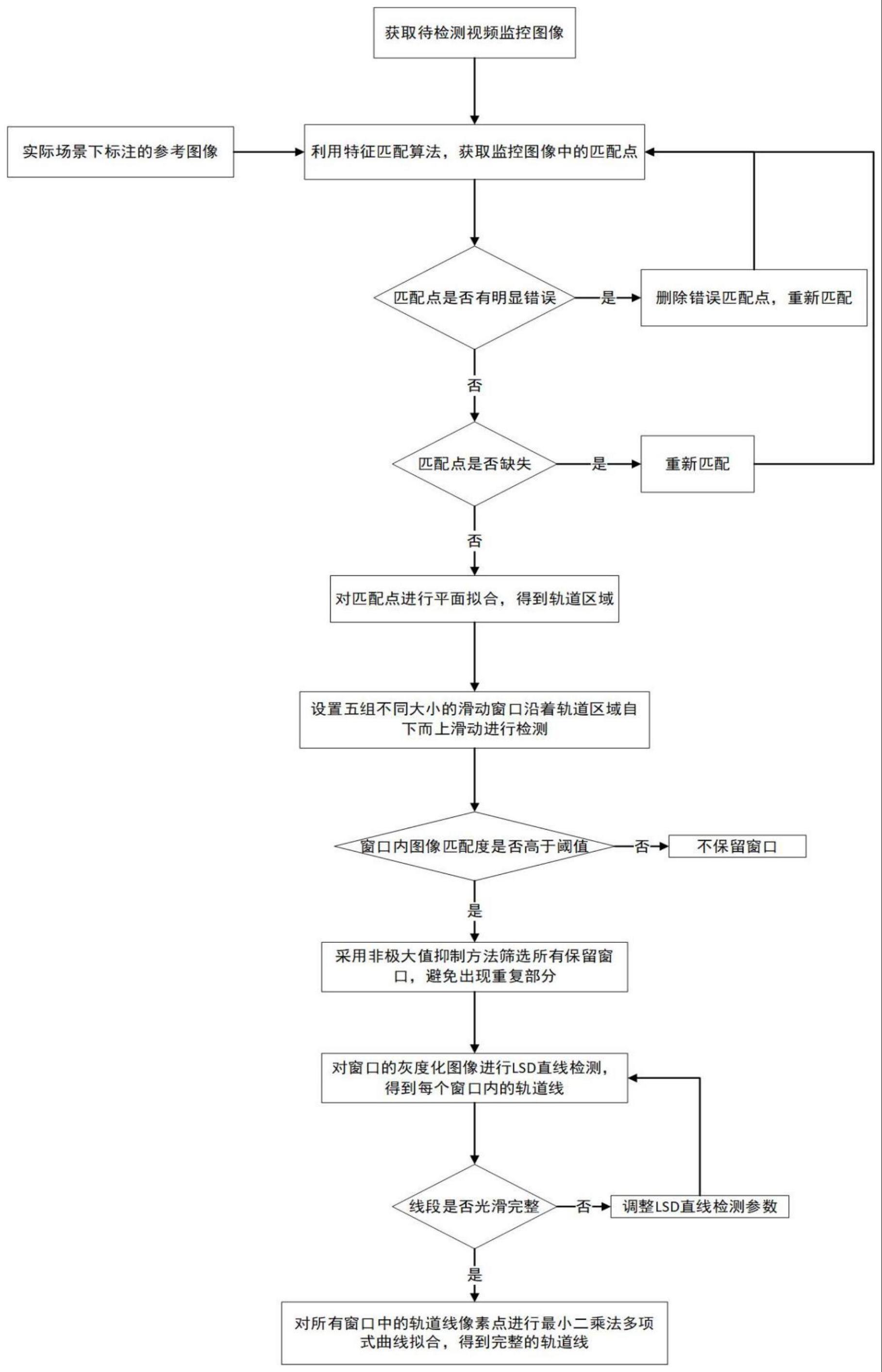
5、第一方面,本发明提供了一种关键点特征匹配的轨道区域及轨道线检测方法,其包括,获取待检测轨道区域的视频监控图像;利用flann图像特征匹配算法,确定待检测轨道区域的匹配点;对所有的匹配点进行平面拟合,得到完整的轨道区域;采用滑窗检测方式,获取轨道区域中每个窗口内的轨道区域的灰度图像;对每个窗口内的灰度图像进行lsd直线检测,得到每个窗口内的轨道线;对所有窗口中的轨道线像素点进行最小二乘法多项式曲线拟合,得到完整的轨道线。
6、作为本发明所述关键点特征匹配的轨道区域及轨道线检测方法的一种优选方案,其中:所述视频监控图像包括在不同环境和光照条件下的监控摄像头拍摄的视频中截取的图像。
7、作为本发明所述关键点特征匹配的轨道区域及轨道线检测方法的一种优选方案,其中:所述确定待检测轨道区域的匹配点包括在给定视频中截取到的每一帧图像,对图像中的轨道区域进行标记,将标记后的图像作为参考图像;当匹配点有明显错误时,则删除错误匹配点,进行重新匹配;当匹配点无明显错误时,若匹配点有缺失,则进行重新匹配,以弥补缺失部分,若无缺失,则进行下一步操作。
8、作为本发明所述关键点特征匹配的轨道区域及轨道线检测方法的一种优选方案,其中:所述对所有的匹配点进行平面拟合包括利用alpha-shapes数学模型,对匹配点的边界值点进行闭环连接,进而获取平面区域,得到完整的轨道区域。
9、作为本发明所述关键点特征匹配的轨道区域及轨道线检测方法的一种优选方案,其中:所述滑窗检测方法包括收集大量曲率不同的轨道区域图像,所述轨道区域图像包括直线路段、弯道路段以及连接直线路段和弯道路段之间的缓和曲线路段,其中缓和曲线通常采用三次抛物线的形式,通过传统卷积神经网络cnn训练分类器,输出不同类别轨道区域的类别概率;设置五组不同大小的窗口沿着所述轨道区域自下而上滑动进行检测;滑动距离为窗口的高度,每次滑动时对当前窗口执行所述分类器,如果给出高于设定阈值的分类分数,则保留窗口,否则不保留。
10、作为本发明所述关键点特征匹配的轨道区域及轨道线检测方法的一种优选方案,其中:所述获取轨道区域中每个窗口内的轨道区域的灰度图像包括将所有窗口进行处理之后,得到不同窗口检测到的轨道区域,采用非极大值抑制算法进行筛选,经筛选后可以获得每个窗口内单独且精确率高的轨道区域图像,对每个窗口内的轨道区域图像进行灰度化处理。
11、作为本发明所述关键点特征匹配的轨道区域及轨道线检测方法的一种优选方案,其中:所述对所有窗口中的轨道线像素点进行最小二乘法多项式曲线拟合包括定义曲线函数为:y=a0+a1*x+a2*x2++ak*xk,根据获取到的像素坐标点,定义拟合曲线函数为:y=a0+a1*x,其中,a0和a1为曲线参数;最小二乘法曲线拟合公式如下:如公式所示,将每个所述像素坐标点作为离散坐标点,求解每个离散点到拟合曲线函数的距离,使得近似曲线在所有轨道线图像像素点的偏差平方和r2最小,即:通过选取不同的系数a0、a1、a2…ak,使r2最小,即可完成轨道线的拟合:如公式所示,为使r2最小,对公式进行多元微分,即:将获取到的每个像素坐标点代入上式,求解其线性方程组,得到a0和a1两个参数的值;将a0和a1的值代入拟合曲线函数y=a0+a1*x中,得到最终拟合曲线函数,即完整的轨道线。
12、第二方面,本发明实施例提供了一种关键点特征匹配的轨道区域及轨道线检测系统,其包括:使用特征提取算法和特征匹配算法,实现上述方法的步骤,并在任一系统和硬件平台上运行计算和处理图像。
13、第三方面,本发明实施例提供了一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其中:所述处理器执行所述计算机程序时实现上述方法的任一步骤。
14、第四方面,本发明实施例提供了一种计算机可读存储介质,其上存储有计算机程序,其中:所述计算机程序被处理器执行时实现上述方法的任一步骤。
15、本发明的有益效果:使用图像特征匹配的方法,将包含多元信息的图像进行关键点匹配,缩小检测范围,实现信息识别与整合,进而实现对轨道区域的准确检测;通过滑窗检测的方式,分割检测区域,对每个区域依次进行检测,进而提升轨道线的检测准确率。
技术特征:
1.一种关键点特征匹配的轨道区域及轨道线检测方法,其特征在于:包括以下步骤,
2.根据权利要求1所述的关键点特征匹配的轨道区域及轨道线检测方法,其特征在于:所述视频监控图像包括在不同环境和光照条件下的监控摄像头拍摄的视频中截取的图像。
3.根据权利要求2所述的关键点特征匹配的轨道区域及轨道线检测方法,其特征在于:所述确定待检测轨道区域的匹配点包括在给定视频中截取到的每一帧图像,对图像中的轨道区域进行标记,将标记后的图像作为参考图像;
4.根据权利要求3所述的关键点特征匹配的轨道区域及轨道线检测方法,其特征在于:所述对所有的匹配点进行平面拟合包括利用alpha-shapes数学模型,对匹配点的边界值点进行闭环连接,进而获取平面区域,得到完整的轨道区域。
5.根据权利要求4所述的关键点特征匹配的轨道区域及轨道线检测方法,其特征在于:所述滑窗检测方法包括收集大量曲率不同的轨道区域图像,所述轨道区域图像包括直线路段、弯道路段以及连接直线路段和弯道路段之间的缓和曲线路段,其中缓和曲线通常采用三次抛物线的形式,通过传统卷积神经网络cnn训练分类器,输出不同类别轨道区域的类别概率;
6.根据权利要求5所述的关键点特征匹配的轨道区域及轨道线检测方法,其特征在于:所述获取轨道区域中每个窗口内的轨道区域的灰度图像包括将所有窗口进行处理之后,得到不同窗口检测到的轨道区域,采用非极大值抑制算法进行筛选,经筛选后可以获得每个窗口内单独且精确率高的轨道区域图像,对每个窗口内的轨道区域图像进行灰度化处理。
7.根据权利要求6所述的关键点特征匹配的轨道区域及轨道线检测方法,其特征在于:所述对所有窗口中的轨道线像素点进行最小二乘法多项式曲线拟合包括定义曲线函数为:
8.一种关键点特征匹配的轨道区域及轨道线检测系统,基于权利要求1~7任一所述的关键点特征匹配的轨道区域及轨道线检测方法,其特征在于:包括使用特征提取算法和特征匹配算法,实现权利要求1~7任一所述方法的步骤,并在任一系统和硬件平台上运行计算和处理图像。
9.一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于:所述处理器执行所述计算机程序时实现权利要求1~7任一所述方法的步骤。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于:所述计算机程序被处理器执行时实现权利要求1~7任一所述方法的步骤。
技术总结
本发明公开了一种关键点特征匹配的轨道区域及轨道线检测方法及系统,方法步骤包括获取待检测轨道区域的视频监控图像;利用FLANN图像特征匹配算法,确定待检测轨道区域的匹配点;对所有的匹配点进行平面拟合,得到完整的轨道区域;采用滑窗检测方法,获取轨道区域中每个窗口内的轨道区域的灰度图像;对每个窗口内的灰度图像进行LSD直线检测,得到每个窗口内的轨道线;对所有窗口中的轨道线像素点进行最小二乘法多项式曲线拟合,得到完整的轨道线。通过图像特征匹配的方法,将图像进行关键点匹配,缩小检测范围,实现信息识别与整合,进而对轨道区域的准确检测;通过滑窗检测的方法,对每个分割区域依次进行检测,提升轨道线的检测准确率。
技术研发人员:陈文,乔彦涵,邹劲柏,季国一
受保护的技术使用者:上海应用技术大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!