一种视觉标志点提取方法、装置、设备及存储介质与流程
本发明涉及图像处理,具体而言,涉及一种视觉标志点提取方法、装置、设备及存储介质。
背景技术:
1、圆形特征广泛应用于机器视觉领域,基于圆孔靶标的摄像机标定、基于圆形特征的机器人自动引导、物体空间位置和姿态测量、视觉导航以及目标对象识别等。为方便圆形特征的寻找,通常采用在物体表面粘贴视觉标志点的方法,这种方法操作方便,计算量少,且更为准确可靠。
2、提取精度与速度是标志点提取中的两个重要问题。众多学者围绕着这两个主要问题展开了研究,提出了大量的提取方法。目前常用方法是在获取图像数据后,再基于cpu、gpu等对提取算法进行改进、优化,对精度、速度都有一定的提升,但基于此种方式,总的耗时等于获取图像数据的时间与提取标志点算法的耗时之和,对速度的提升存在瓶颈,提取效率较低。
技术实现思路
1、本发明的目的在于,针对上述现有技术中的不足,本申请提供了一种视觉标志点提取方法、装置、设备及存储介质,以解决现有技术中标志点提取效率低下等问题。
2、为实现上述目的,本申请实施例采用的技术方案如下:
3、第一方面,本申请实施例提供一种视觉标志点提取方法,所述方法包括:
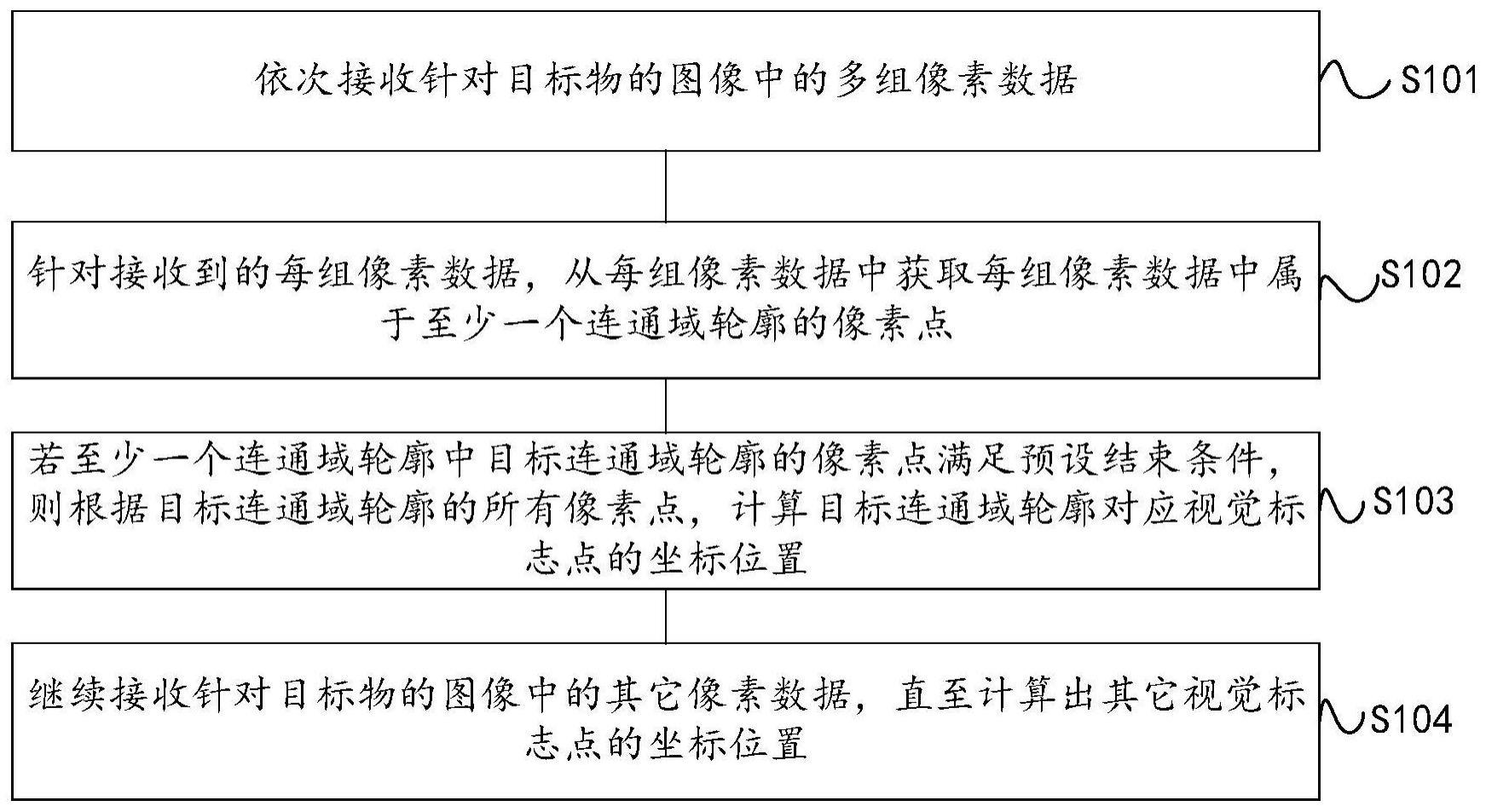
4、依次接收针对目标物的图像中的多组像素数据;
5、针对接收到的每组像素数据,从所述每组像素数据中获取所述每组像素数据中属于至少一个连通域轮廓的像素点;
6、若所述至少一个连通域轮廓中目标连通域轮廓的像素点满足预设结束条件,则根据所述目标连通域轮廓的所有像素点,计算所述目标连通域轮廓对应视觉标志点的坐标位置;
7、继续接收针对所述目标物的图像中的其它像素数据,直至计算出其它视觉标志点的坐标位置。
8、可选地,所述从所述每组像素数据中获取所述每组像素数据中属于至少一个连通域轮廓的像素点,包括:
9、对所述每组像素数据进行边缘轮廓检测,得到所述每组像素数据中的轮廓像素点;
10、根据所述每组像素数据之前的一组像素数据中的轮廓像素点,和所述每组像素数据中的轮廓像素点,进行连通域分类,得到所述至少一个连通域轮廓的像素点。
11、可选地,所述对所述每组像素数据进行边缘轮廓检测,得到所述每组像素数据中的轮廓像素点,包括:
12、计算所述每组像素数据中每个像素点相对于相邻像素点的变化梯度;
13、确定所述每组像素数据中变化梯度大于或等于预设阈值的像素点为所述每组像素数据中的轮廓像素点。
14、可选地,在所述若所述至少一个连通域轮廓中目标连通域轮廓的像素点满足预设结束条件,则根据所述目标连通域轮廓的所有像素点,计算所述目标连通域轮廓对应视觉标志点的坐标位置之前,所述方法还包括:
15、若获取到连续多组像素数据中属于所述至少一个连通域轮廓的像素点,则将属于所述至少一个连通域轮廓的已获取像素点分别存储至至少一个存储区域;
16、若所述目标物的图像中所述目标连通域轮廓的像素点已获取完毕,则确定所述目标连通域轮廓的像素点满足所述预设结束条件;
17、所述根据所述目标连通域轮廓的所有像素点,计算所述目标连通域轮廓对应视觉标志点的坐标位置,包括:
18、从所述目标连通域轮廓对应的目标存储区域中读取所述目标连通域轮廓的所有像素点;
19、根据读取到的所述目标连通域轮廓的所有像素点,计算所述目标连通域轮廓对应视觉标志点的坐标位置。
20、可选地,所述若所述目标物的图像中所述目标连通域轮廓的像素点已获取完毕,则确定所述目标连通域轮廓的像素点满足所述预设结束条件之前,所述方法还包括:
21、若连续至少一组像素数据中未获取到所述目标连通域轮廓的像素点,则确定所述目标物的图像中的所述目标连通域轮廓的像素点已获取完毕。
22、可选地,所述将属于所述至少一个连通域轮廓的已获取像素点分别存储至至少一个存储区域,包括:
23、为属于每个连通域轮廓的已获取像素点配置同一个连通域标签;
24、将具有同一个连通域标签的像素点存储至所述同一个连通域标签对应的一个存储区域中。
25、可选地,所述根据所述目标连通域轮廓的所有像素点,计算所述目标连通域轮廓对应视觉标志点的坐标位置,包括:
26、根据所述目标连通域轮廓的所有像素点,进行曲线拟合运算,得到所述目标连通域轮廓对应视觉标志点的坐标位置。
27、第二方面,本申请实施例提供一种视觉标志点提取装置,所述装置包括:
28、接收模块,用于依次接收针对目标物的图像中的多组像素数据;
29、获取模块,用于针对接收到的每组像素数据,从所述每组像素数据中获取所述每组像素数据中属于至少一个连通域轮廓的像素点;
30、计算模块,用于若所述至少一个连通域轮廓中目标连通域轮廓的像素点满足预设结束条件,则根据所述目标连通域轮廓的所有像素点,计算所述目标连通域轮廓对应视觉标志点的坐标位置;
31、接收模块,还用于继续接收针对所述目标物的图像中的其它像素数据,直至计算出其它视觉标志点的坐标位置。
32、第三方面,本申请实施例提供一种处理设备,包括:处理器、存储介质,所述处理器与所述存储介质之间通过总线通信连接,所述存储介质存储有所述处理器可执行的程序指令,所述处理器调用存储介质中存储的程序,以执行如第一方面任一所述的视觉标志点提取方法的步骤。
33、第四方面,本申请实施例提供一种存储介质,所述存储介质上存储有计算机程序,所述计算机程序被处理器运行时执行如第一方面任一所述的视觉标志点提取方法的步骤。
34、相对于现有技术而言,本申请具有以下有益效果:
35、本申请提供一种视觉标志点提取方法、装置、设备及存储介质,该方法通过依次接收针对目标物的图像中的多组像素数据;针对接收到的每组像素数据,从每组像素数据中获取每组像素数据中属于至少一个连通域轮廓的像素点;若至少一个连通域轮廓中目标连通域轮廓的像素点满足预设结束条件,则根据目标连通域轮廓的所有像素点,计算目标连通域轮廓对应视觉标志点的坐标位置;继续接收针对目标物的图像中的其它像素数据,直至计算出其它视觉标志点的坐标位置。从而,缩短了标志点的提取时间,提高了标志点的提取效率,使得基于标志点的视觉识别更加及时、精准。
技术特征:
1.一种视觉标志点提取方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述从所述每组像素数据中获取所述每组像素数据中属于至少一个连通域轮廓的像素点,包括:
3.根据权利要求2所述的方法,其特征在于,所述对所述每组像素数据进行边缘轮廓检测,得到所述每组像素数据中的轮廓像素点,包括:
4.根据权利要求1所述的方法,其特征在于,在所述若所述至少一个连通域轮廓中目标连通域轮廓的像素点满足预设结束条件,则根据所述目标连通域轮廓的所有像素点,计算所述目标连通域轮廓对应视觉标志点的坐标位置之前,所述方法还包括:
5.根据权利要求4所述的方法,其特征在于,所述若所述目标物的图像中所述目标连通域轮廓的像素点已获取完毕,则确定所述目标连通域轮廓的像素点满足所述预设结束条件之前,所述方法还包括:
6.根据权利要求4所述的方法,其特征在于,所述将属于所述至少一个连通域轮廓的已获取像素点分别存储至至少一个存储区域,包括:
7.根据权利要求1-6任一所述的方法,其特征在于,所述根据所述目标连通域轮廓的所有像素点,计算所述目标连通域轮廓对应视觉标志点的坐标位置,包括:
8.一种视觉标志点提取装置,其特征在于,所述装置包括:
9.一种处理设备,其特征在于,包括:处理器、存储介质,所述处理器与所述存储介质之间通过总线通信连接,所述存储介质存储有所述处理器可执行的程序指令,所述处理器调用存储介质中存储的程序,以执行如权利要求1至7任一所述的视觉标志点提取方法的步骤。
10.一种存储介质,其特征在于,所述存储介质上存储有计算机程序,所述计算机程序被处理器运行时执行如权利要求1至7任一所述的视觉标志点提取方法的步骤。
技术总结
本申请提供一种视觉标志点提取方法、装置、设备及存储介质,涉及图像处理技术领域。该方法通过依次接收针对目标物的图像中的多组像素数据;针对接收到的每组像素数据,从每组像素数据中获取每组像素数据中属于至少一个连通域轮廓的像素点;若至少一个连通域轮廓中目标连通域轮廓的像素点满足预设结束条件,则根据目标连通域轮廓的所有像素点,计算目标连通域轮廓对应视觉标志点的坐标位置;继续接收针对目标物的图像中的其它像素数据,直至计算出其它视觉标志点的坐标位置。从而,缩短了标志点的提取时间,提高了标志点的提取效率,使得基于标志点的视觉识别更加及时、精准。
技术研发人员:楚梁,田威,王晓南,王辰
受保护的技术使用者:武汉中观自动化科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!