一种船侧手动着箱速度给定优化方法与流程
本发明涉及船侧作业,尤其涉及一种船侧手动着箱速度给定优化方法。
背景技术:
1、目前岸桥在船侧作业时,由于船舶、吊具晃动的原因,在船侧抓、放箱的过程,需要人机协同完成,目前手动作业阶段的起升速度限制来源于根据船型扫描(以下称船扫)的激光器扫描数据制定的智能减速,因激光器扫描数据主要用以安全辅助,扫描出的作业贝位集装箱的分布、高度位置与实际情况存在一定程度的偏差,导致软着箱功能存在限速不准确的情况导致司机手动作业时存在限速过多或着箱时速度过快的现象。
2、岸边集装箱起重机在对船舶作业时需要操作员控制对位及给定适当的运行速度,目前使用激光器扫描船舶轮廓并计算速度给定的机制因受天气情况不一、船舶轮廓特性差异等因素而未能实现全场景辅助作业,如图2所示,船扫激光器扫描障碍物异常,在码头现场能见度较低的情况下或船扫激光器表面存在污染,或在船舶驾驶台旁边,容易发生船扫激光器扫描障碍物异常的情况,这类情况会引起起升异常限速,其手动着箱前的起升速度限制后只有全速的30%,对作业效率影响较大;如图3所示,传统方法还存在岸桥船侧着箱前起升速度过快的情况,会导致起升机构钢丝绳松绳过多,对设备带来不利影响;因此亟需对传统船侧手动着箱速度给定方法进行优化,解决因使用船扫激光器和现有速度给定方法存在的异常限速、起升速度过快的问题,以解决起升速度过快影响作业安全的问题,减少钢丝绳松绳量以保护设备,避免异常限速以提高效率。
技术实现思路
1、鉴于目前存在的使用船扫激光器和现有速度给定方法影响作业安全和工作效率的问题,本发明提供一种船侧手动着箱速度给定优化方法,选用防摇相机获取实时吊具位置,建立坐标系,设定合理的高度判断逻辑,对吊具下降过程进行速度优化,并实时更新作业数据,以提高作业安全性,保护设备,并提升作业效率。
2、为达到上述目的,本发明的实施例采用如下技术方案:
3、一种船侧手动着箱速度给定优化方法,所述船侧手动着箱速度给定优化方法应用于同一贝位的不同排位,包括:
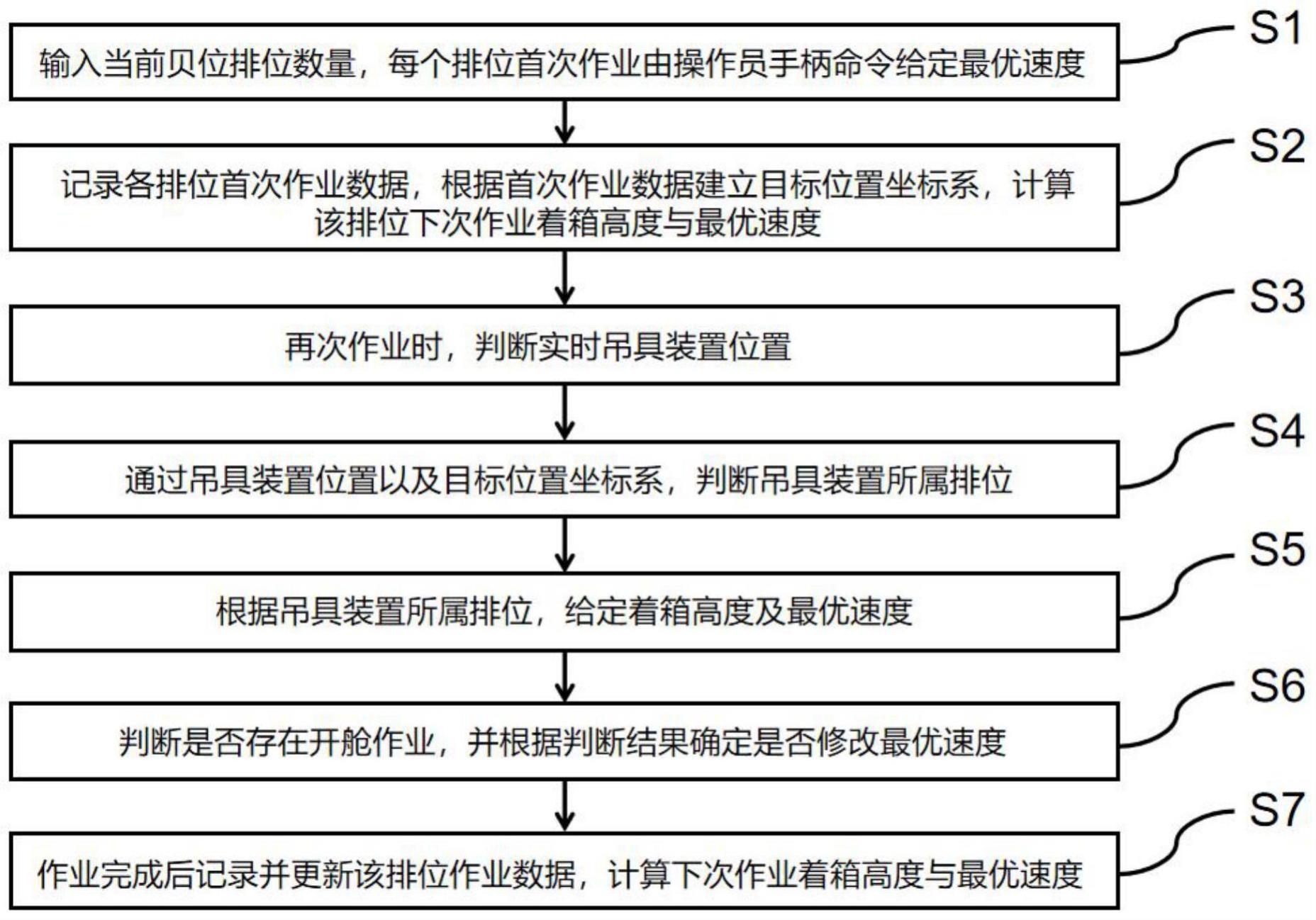
4、输入当前贝位排位数量,每个排位首次作业由操作员手柄命令给定最优速度;
5、记录各排位首次作业数据,根据首次作业数据建立目标位置坐标系,计算该排位下次作业着箱高度与最优速度;
6、再次作业时,判断实时吊具装置位置;
7、通过吊具装置位置以及目标位置坐标系,判断吊具装置所属排位;
8、根据吊具装置所属排位,给定着箱高度及最优速度;
9、作业完成后记录并更新该排位作业数据,计算下次作业着箱高度与最优速度。
10、依照本发明的一个方面,所述记录作业数据包括:记录本次作业的起升高度,记录本次作业时该排位小车实时位置。
11、依照本发明的一个方面,所述计算该排位下次作业着箱高度与最优速度包括:将该排位本次作业着箱高度加上一个箱子的箱高,再加上安全补偿高度,得出该排位下次作业的着箱高度,根据该排位下次作业的着箱高度计算下次作业的最优速度。
12、依照本发明的一个方面,所述实时吊具装置位置为吊具实时位置加小车实时位置,所述吊具实时位置通过防摇相机获取。
13、依照本发明的一个方面,所述根据吊具装置位置,给定目标高度及最优速度包括:
14、吊具装置位置在任一排位15cm范围内,则认定吊具装置该次作业属于该排位作业;
15、吊具装置位置不处于任一排位15cm范围内,则以吊具装置位置的中心,找出该中心对应的三个最近排位,以三个最近排位中高度最大的排位为目标排位,认定吊具装置该次作业属于该排位作业。
16、依照本发明的一个方面,所述船侧手动着箱速度给定优化方法还包括:
17、判断是否存在开舱作业;
18、若存在,记录该贝位船舱高度;
19、判断该次作业是否为开舱作业;
20、若是,将最优速度分为舱上速度与舱下速度;
21、若否,最优速度不进行更改;
22、若不存在开舱作业,不记录该贝位船舱高度。
23、依照本发明的一个方面,所述判断是否开舱作业的方法为:
24、判断货物类型是否为“舱盖板”;
25、若是,则为开舱作业;
26、若否,判断操作模式是否为“舱盖板模式”;
27、若是“舱盖板模式”,则为开舱作业;
28、若不是“舱盖板模式”,则不为开舱作业。
29、依照本发明的一个方面,所述舱下速度为,吊具装置在舱下下降过程中,满足着箱前能减速至设定的最小速度的速度最大值;所述舱上速度为,吊具装置下降过程中,下降至舱下时,满足能减速到舱下速度的最大值。
30、依照本发明的一个方面,所述最优速度为,吊具装置下降过程中,满足着箱前能减速至设定的最小速度的速度最大值。
31、依照本发明的一个方面,所述设定的最小速度为吊具空载时额定速度的5%。
32、本发明实施的优点:本发明所述的一种船侧手动着箱速度给定优化方法,包括以下步骤:输入当前贝位排位数量,每个排位首次作业手动给定最优速度,记录首次作业数据,以此建立目标位置坐标系,并计算下一次作业着箱高度与最优速度,之后每次作业都可以通过防摇相机获取吊具实时位置,判断其在坐标系中所述排位,给定计算的着箱高度与最优速度,同时记录该次数据,计算下一次作业数据,选用防摇相机替换船扫激光器获取实时吊具位置,建立坐标系设定合理的高度判断逻辑,对吊具下降过程进行速度优化,并在作业完成后实时更新作业数据,以提高作业安全性,保护设备,提升作业效率。
技术特征:
1.一种船侧手动着箱速度给定优化方法,其特征在于,所述船侧手动着箱速度给定优化方法应用于同一贝位的不同排位,包括:
2.根据权利要求1所述的一种船侧手动着箱速度给定优化方法,其特征在于,所述记录作业数据包括:记录本次作业的起升高度,记录本次作业时该排位小车实时位置。
3.根据权利要求2所述的一种船侧手动着箱速度给定优化方法,其特征在于,所述计算该排位下次作业着箱高度与最优速度包括:将该排位本次作业着箱高度加上一个箱子的箱高,再加上安全补偿高度,得出该排位下次作业的着箱高度,根据该排位下次作业的着箱高度计算下次作业的最优速度。
4.根据权利要求2所述的一种船侧手动着箱速度给定优化方法,其特征在于,所述实时吊具装置位置为吊具实时位置加小车实时位置,所述吊具实时位置通过防摇相机获取。
5.根据权利要求1所述的一种船侧手动着箱速度给定优化方法,其特征在于,所述通过吊具装置位置以及目标位置坐标系,判断吊具装置所属排位包括:
6.根据权利要求1所述的一种船侧手动着箱速度给定优化方法,其特征在于,还包括:
7.据权利要求6所述的一种船侧手动着箱速度给定优化方法,其特征在于,所述判断是否开舱作业的方法为:
8.根据权利要求6所述的一种船侧手动着箱速度给定优化方法,其特征在于,所述舱下速度为,吊具装置在舱下下降过程中,满足着箱前能减速至设定的最小速度的速度最大值;所述舱上速度为,吊具装置下降过程中,下降至舱下时,满足能减速到舱下速度的最大值。
9.根据权利要求3或8所述的一种船侧手动着箱速度给定优化方法,其特征在于,所述最优速度为,吊具装置下降过程中,满足着箱前能减速至设定的最小速度的速度最大值。
10.根据权利要求9所述的一种船侧手动着箱速度给定优化方法,其特征在于,所述设定的最小速度为吊具空载时额定速度的5%。
技术总结
本发明公开了一种船侧手动着箱速度给定优化方法,包括以下步骤:输入当前贝位排位数量,每个排位首次作业手动给定最优速度,记录首次作业数据,以此建立目标位置坐标系,并计算下一次作业着箱高度与最优速度,之后每次作业都可以通过防摇相机获取吊具实时位置,判断其在坐标系中所述排位,给定计算的着箱高度与最优速度,同时记录该次数据,计算下一次作业数据,选用防摇相机替换船扫激光器获取实时吊具位置,建立坐标系设定合理的高度判断逻辑,对吊具下降过程进行速度优化,并在作业完成后实时更新作业数据,以提高作业安全性,保护设备,提升作业效率。
技术研发人员:郭文生,屠沪杰,周皓,戚利华,顾萱欧,胡群
受保护的技术使用者:上海国际港务(集团)股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!