一种基于深度学习的车辆身份识别方法及装置与流程
本发明涉及车辆识别,尤其涉及一种基于深度学习的车辆身份识别方法及装置。
背景技术:
1、车辆超速自动抓拍、闯红灯车辆的自动抓拍等应用已经成为智能交通技术中不可或缺的一部分。而对于车辆身份识别是实现这些应用的基础,目前常见的基于深度学习的车辆身份识别方法有两类,一类是基于视频的基于深度学习的车辆身份识别方法,其通过识别车牌、车辆颜色和车辆纹理等特征去精准识别车辆身份;一类是基于无线射频技术对车辆的身份进行精准识别,例如在高速出入口的etc收费通道就是通过应用无线射频技术实现对车辆身份进行识别后收费。在良好的检测条件和特定的场所下,上述方法都可以很好地对车辆的身份进行精准识别,但在不良的条件下,例如下雨天、雾天和夜晚的情况下,上述方法均存在不同程度的限制。现有技术cn2009202658231公开了车辆识别器,通过高清摄像单元采集信息,加强效果主要是通过增加补光灯的应用,在不良的条件下其识别效果还是不太好。
技术实现思路
1、有鉴于此,本发明的目的在于提出一种基于深度学习的车辆身份识别方法及装置,以解决现有识别技术在不良环境条件下存在不同程度限制的问题。
2、基于上述目的,本发明提供了一种基于深度学习的车辆身份识别方法,包括:
3、获取公路监控可见光视频和红外视频;
4、从公路监控可见光视频和公路监控红外视频中分别提取初始可见光图像数据和初始红外图像数据;
5、将所述初始可见光图像数据和所述初始红外图像数据分别预处理,获得目标可见光图像数据和目标红外图像数据;
6、将所述目标可见光图像数据和所述目标红外图像数据输入训练后的检测模型中,获得车辆外观信息、车辆类型信息、车辆轴数信息和乘客人数信息;
7、融合所述车辆外观信息、所述车辆类型信息、所述车辆轴数信息和所述乘客人数信息,获得融合结果,基于所述融合结果,输出车辆身份识别结果。
8、所述将所述初始可见光图像数据预处理获得可见光图像数据,包括:
9、将所述初始可见光图像数据中的图像进行剪切、旋转、拼接生成新的可用于训练后的检测模型训练的图像数据。
10、所述将所述初始红外图像数据预处理获得红外图像数据,包括:
11、将所述初始红外图像数据中的图像进行剪切、旋转、拼接生成新的可用于训练后的检测模型训练的图像数据。
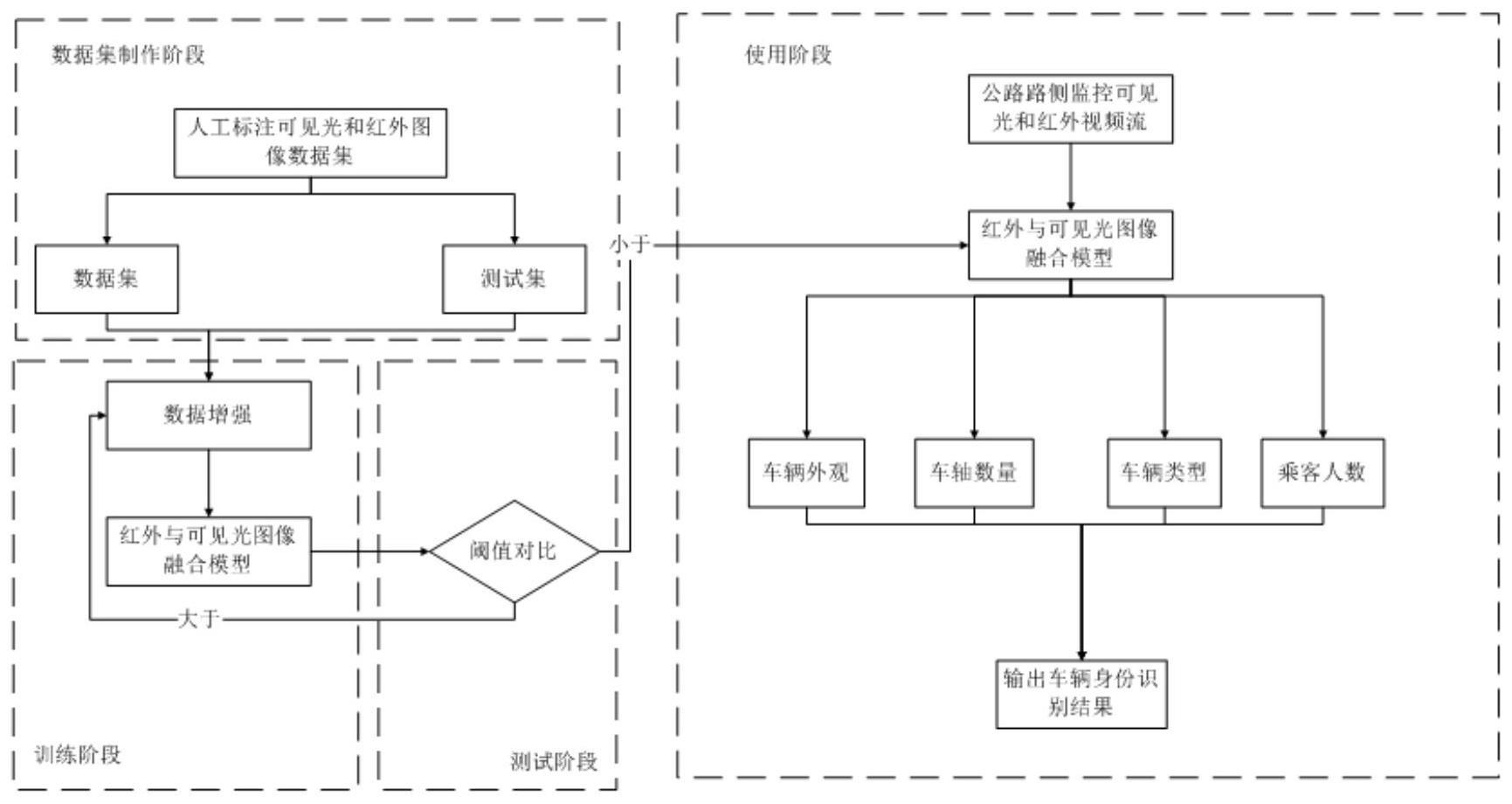
12、所述检测模型的训练过程包括:
13、获取历史可见光图像数据和历史红外图像数据;
14、对所述历史可见光图像数据和所述历史红外图像数据分别进行标注,获得测试可见光图像数据和测试红外图像数据;
15、所述测试可见光图像数据和所述测试红外图像数据组成数据集和测试集;
16、将所述数据集导入初始检测模型中进行训练,以调整模型参数,并将所述测试集导入调整后的检测模型中,评价检测模型的检测精度,若检测精度小于阈值,输出训练好的检测模型,检测精度大于阈值,则更新数据集并初始化初始检测模型的参数,返回执行用更新后的数据集对初始检测模型进行训练的步骤。
17、所述对所述历史可见光图像数据进行标注获得测试可见光图像数据和所述对所述历史红外图像数据进行标注获得测试红外图像数据的标注的方法为:
18、
19、其中,x为图像矩阵,μ为图像像素均值,σ为图像像素标准差。
20、所述初始检测模型包括利用四层3x3的卷积层构成的编码器和解码器,卷积层的后三层加入了密集连接。
21、所述融合所述车辆外观信息、所述车辆类型信息、所述车辆轴数信息和所述乘客人数信息,获得融合结果,基于所述融合结果,输出车辆身份识别结果,包括:
22、将所述车辆外观信息转换为车辆外观信息值,将所述车辆类型信息利用数字表示变换成车辆类型信息值;
23、融合公式为:
24、融合结果=|已保存的车辆外观信息值-刚检测到的车辆外观信息值|+|已保存的车辆类型信息值-刚检测到的车辆类型信息值|+|已保存的车辆轴数-刚检测到的车辆轴数|+|已保存的车辆乘客人数-刚检测到的车辆乘客人数|;
25、若融合结果为0,则车辆身份识别成功;若融合结果不为0,则车辆身份识别不成功;
26、输出识别成功的车辆身份。
27、一种车辆身份识别装置,其特征在于,包括:
28、获取模块,用于获取公路监控可见光视频和红外视频;
29、提取模块,用于从公路监控可见光视频和公路监控红外视频中分别提取初始可见光图像数据和初始红外图像数据;
30、预处理模块,用于将所述初始可见光图像数据和所述初始红外图像数据分别预处理,获得目标可见光图像数据和目标红外图像数据;
31、信息获取模块,用于将所述目标可见光图像数据和所述目标红外图像数据输入训练后的检测模型中,获得车辆外观信息、车辆类型信息、车辆轴数信息和乘客人数信息;
32、融合模块,用于融合所述车辆外观信息、所述车辆类型信息、所述车辆轴数信息和所述乘客人数信息,获得融合结果,基于所述融合结果,输出车辆身份识别结果。
33、基于深度学习的车辆身份识别方法
34、本发明的有益效果:通过获取目标可见光图像数据和所述目标红外图像数据,然后将获取的目标可见光图像数据和所述目标红外图像数据输入训练后的检测模型,获得车辆外观信息、车辆类型信息、车辆轴数信息和乘客人数信息,然后融合这四类信息进行车辆身份的精准识别,输出车辆身份识别结果,从而避免雨天、雾天和夜晚等不良条件下,单一判断指标导致的车辆身份识别错误。
技术特征:
1.一种基于深度学习的车辆身份识别方法,其特征在于,包括:
2.根据权利要求1所述的基于深度学习的车辆身份识别方法,其特征在于,所述将所述初始可见光图像数据预处理获得可见光图像数据,包括:
3.根据权利要求1所述的基于深度学习的车辆身份识别方法,其特征在于,所述将所述初始红外图像数据预处理获得红外图像数据,包括:
4.根据权利要求1所述的基于深度学习的车辆身份识别方法,其特征在于,所述检测模型的训练过程包括:
5.根据权利要求4所述的基于深度学习的车辆身份识别方法,其特征在于,所述对所述历史可见光图像数据进行标注获得测试可见光图像数据和所述对所述历史红外图像数据进行标注获得测试红外图像数据的标注的方法为:
6.根据权利要求4所述的基于深度学习的车辆身份识别方法,其特征在于,所述初始检测模型包括利用四层3x3的卷积层构成的编码器和解码器,卷积层的后三层加入密集连接。
7.根据权利要求1所述的基于深度学习的车辆身份识别方法,其特征在于,所述融合所述车辆外观信息、所述车辆类型信息、所述车辆轴数信息和所述乘客人数信息,获得融合结果,基于所述融合结果,输出车辆身份识别结果,包括:
8.一种车辆身份识别装置,其特征在于,包括:
技术总结
本发明涉及车辆识别技术领域,具体涉及一种基于深度学习的车辆身份识别方法及装置,为解决现有识别技术在不良条件下存在不同长度限制的问题。所述识别方法包括:获取公路监控可见光视频和红外视频;提取初始可见光图像数据和初始红外图像数据;将所述初始可见光图像数据和所述初始红外图像数据分别预处理,获得目标可见光图像数据和目标红外图像数据;将所述目标可见光图像数据和所述目标红外图像数据输入训练后的检测模型中,获得车辆外观信息、车辆类型信息、车辆轴数信息和乘客人数信息;融合上述信息,获得融合结果,输出车辆身份识别结果。通过上述四类信息进行车辆身份的识别,避免在不良条件下,单一判断指标导致的车辆身份识别错误。
技术研发人员:杜渐,符锌砂,彭锦辉,曾彦杰,段洪琳,何站稳,宋建斌,吴武勋,张凯,江子强,姜德宏,徐华,武英杰
受保护的技术使用者:招商局公路网络科技控股股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!