一种暗环境三维重建方法与流程
本发明涉及三维建模,具体涉及一种暗环境三维重建方法。
背景技术:
1、三维数字化数据可以提升人们对真实空间的认知水平和层次,为人们带来远超二维图像数据的丰富信息。利用高精度激光扫描仪获得三维环境的点云信息进行建模是一种常见的方案,但是激光扫描仪设备昂贵,如何高效准确低廉地获得真实可用的三维数字化数据,是限制三维应用进一步蓬勃发展的关键性瓶颈之一,以预先构建好的模型数据库为基础,对用户输入的单张场景图像进行图像分析获取目标模型的局部图像,在预先构建模型数据库中进行模型检索确定匹配的模型,进而实现三维重建。其中,预设的模型数据库基于虚拟三维空间的不同位置和角度,对三维模型进行投影映射,用一组多角度的投影图像代替三维模型本身,这样,就将模型检索中二维-三维检索问题转换成二维-二维相似性度量问题;当某一个三维模型在某一视角下的投影图像与待检索的局部图像比较接近,则认为投影图相对应的三维模型即为检索结果。针对现有技术存在以下问题:
2、现有的暗环境三维重建方法对于相机的标定方法没有进行着重的考量,相机的标定获得的相机的内参的精确度会对之后的重建步骤的计算产生比较大的影响;而且在对特征点进行提取时所采用的全局特征容易受到环境因素光照、旋转等的变化带来的影响无法适用于暗环境中使用;并且点云数据的融合无法处理一些有约束调节的问题,不能够生产精度较高的真实的三维世界。
技术实现思路
1、本发明提供一种暗环境三维重建方法,以解决上述背景技术中提出的问题。
2、为解决上述技术问题,本发明所采用的技术方案是:
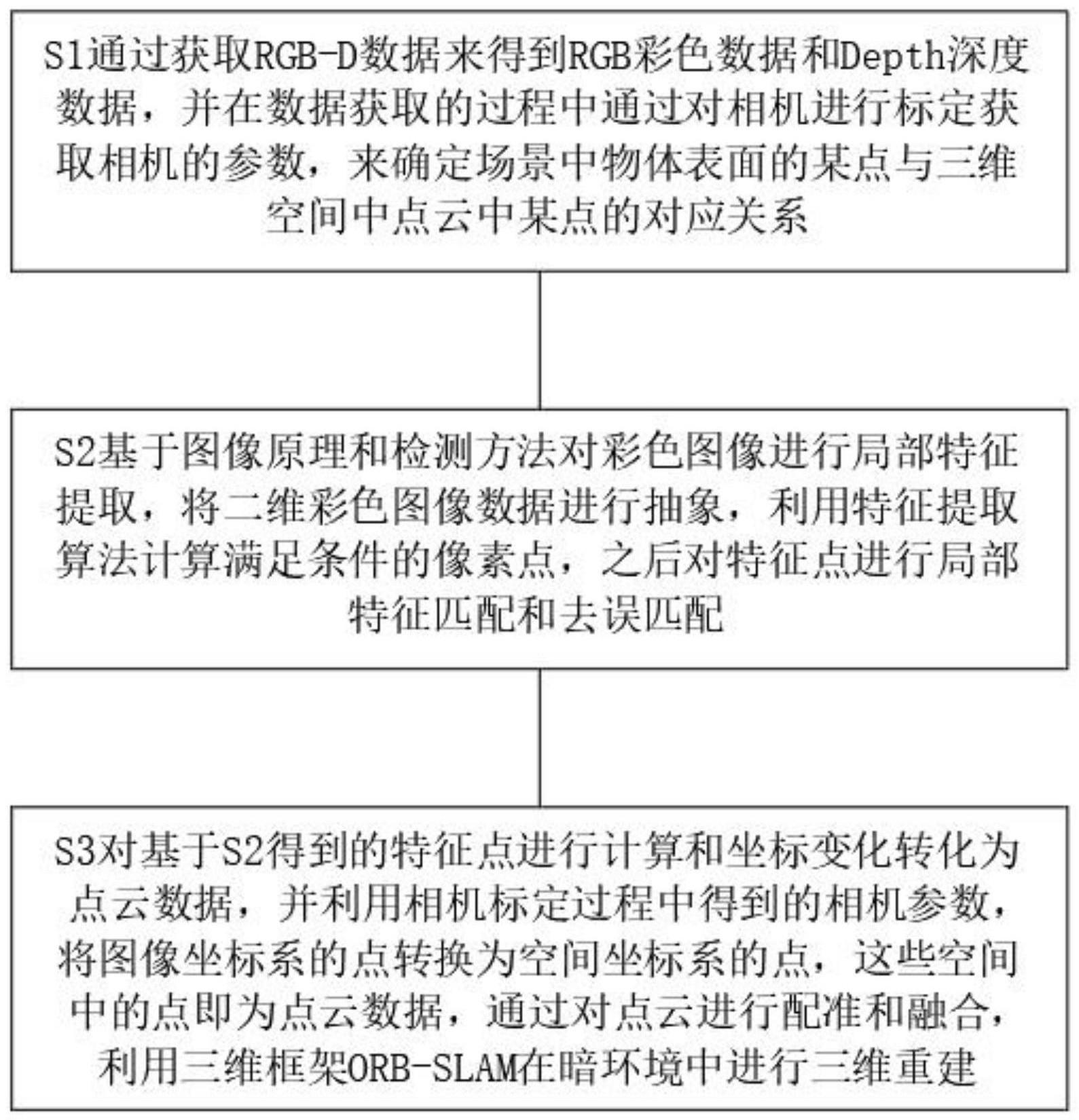
3、一种暗环境三维重建方法,重建方法包括以下步骤:s1通过获取rgb-d数据来得到rgb彩色数据和depth深度数据,并在数据获取的过程中通过对相机进行标定获取相机的参数,来确定场景中物体表面的某点与三维空间中点云中某点的对应关系;
4、s2基于图像原理和检测方法对彩色图像进行局部特征提取,将二维彩色图像数据进行抽象,利用特征提取算法计算满足条件的像素点,之后对特征点进行局部特征匹配和去误匹配;
5、s3对基于s2得到的特征点进行计算和坐标变化转化为点云数据,并利用相机标定过程中得到的相机参数,将图像坐标系的点转换为空间坐标系的点,这些空间中的点即为点云数据,通过对点云进行配准和融合,利用三维框架orb-slam在暗环境中进行三维重建。
6、本发明技术方案的进一步改进在于:所述步骤s1包括:s11rgbd数据的获取采用kinect设备进行数据采集,kinect有彩色相机和深度相机,可以同时获得rgb彩色数据和depth深度数据,拍摄的结果需要对kinect利用openni驱动程序编程来获取;
7、s12并采用传统的相机标定的方式,来获取相机的内参进行深度数据到点云的转换,的转换,来确定场景中物体表面的某点与三维空间中点云中某点的对应关系,即由深度数据所在的图像坐标系转换为点云所在的空间坐标系。
8、本发明技术方案的进一步改进在于:所述步骤s2包括:s21基于图像原理和检测方法对彩色图像进行局部特征提取,将二维彩色图像数据进行抽象,利用特征提取算法计算出满足的条件的像素点;
9、s22在提取局部特征的前提下,进行特征点的匹配,对已经提取了特征点的两帧彩色图像,对两个特征点集合进行匹配算法计算;
10、s23对于提取的特征点采用ransac算法来匹配特征点对的误匹配部分进行消除,进行优化计算来删除其中不匹配特征点。
11、本发明技术方案的进一步改进在于:所述步骤s3包括:s31点云的配准采用迭代最近点算法来对两帧之间的点云数据进行匹配,让源点云分步地变化到目标点云的坐标系中然后合并点云,多次配准得到的合并点云集合则能够进行点云融合;
12、s32采用orb-salm中的融合模块来完成点云融合,通过激光点云构建场景空间信息,将点云与影像精确融合形成实景三维数据库,以此为基础来在暗环境中三维重建。
13、由于采用了上述技术方案,本发明相对现有技术来说,取得的技术进步是:
14、1、本发明提供一种暗环境三维重建方法,通过对相机的标定方法进行选取,相机标定方法有传统的相机标定方法、主动视觉相机标定法、相机自标定法,三种,而传统的相机标定方法相较于其他两种标定方法对设备的要求比较低,而相机的标定获得的相机的内参的精确度会对之后的重建步骤的计算产生比较大的影响,传统的相机标定方法需要获取现有场景结构的信息,与其他的标定方法相比其优点是适用性好,并且标定过程的精度高,使得相机的内参更加精确。
15、2、本发明提供一种暗环境三维重建方法,通过对彩色图像进行局部特征提取,将二维彩色图像数据进行抽象,利用特征提取算法计算出满足的条件的像素点,对于提取的特征点采用ransac算法来匹配特征点对的误匹配部分进行消除,进行优化计算来删除其中不匹配特征点,图像进行局部特征提取是对其内容进行分析和检测的前提,是将高维的图像数据进行抽象来化简表达的一种非常有效的方式,局部图像特征具有在图像中蕴含数量丰富,特征间相关度小,遮挡情况下不会因为部分特征的消失而影响其他特征的检测和匹配,不易受外界环境干扰等优点,相较于暗环境下,全局特征则容易受到环境因素光照、旋转等的变化带来的影响而局部图像特征更加适用。
16、3、本发明提供一种暗环境三维重建方法,通过迭代最近点算法来对两帧之间的点云数据进行匹配,通过迭代计算使得源点云分步地变换到目标点云的坐标系中然后合并点云,以合并的新点云为目标点云再与其他帧的点云数据进行配准计算,多次配准得到的合并点云集合就能够进行点云融合,迭代最近点算法在众多最优化算法中具有广泛的应用,并且在实践中取得了良好的应用效果。它的优点在于算法简单,计算效率高,可以很好地处理一些有约束条件的问题,而在采用orb-salm中的融合模块来完成点云融合后三维激光点云可以精确地记录实体的空间数据,而salm的高分辨率的全景影像又可以形象地展示实体的二维纹理,二者结合起来能够生成高精度的真实的三维世界。
技术特征:
1.一种暗环境三维重建方法,其特征在于:重建方法包括以下步骤:s1通过获取rgb-d数据来得到rgb彩色数据和depth深度数据,并在数据获取的过程中通过对相机进行标定获取相机的参数,来确定场景中物体表面的某点与三维空间中点云中某点的对应关系;
2.根据权利要求1所述的一种暗环境三维重建方法,其特征在于:所述步骤s1包括:s11rgbd数据的获取采用kinect设备进行数据采集,kinect有彩色相机和深度相机,可以同时获得rgb彩色数据和depth深度数据,拍摄的结果需要对kinect利用openni驱动程序编程来获取;
3.根据权利要求1所述的一种暗环境三维重建方法,其特征在于:所述步骤s2包括:s21基于图像原理和检测方法对彩色图像进行局部特征提取,将二维彩色图像数据进行抽象,利用特征提取算法计算出满足的条件的像素点;
4.根据权利要求1所述的一种暗环境三维重建方法,其特征在于:所述步骤s3包括:s31点云的配准采用迭代最近点算法来对两帧之间的点云数据进行匹配,让源点云分步地变化到目标点云的坐标系中然后合并点云,多次配准得到的合并点云集合则能够进行点云融合;
技术总结
本发明公开了一种暗环境三维重建方法,涉及三维建模技术领域,包括S1通过获取RGB‑D数据来得到RGB彩色数据和Depth深度数据,并在数据获取的过程中通过对相机进行标定获取相机的参数,来确定场景中物体表面的某点与三维空间中点云中某点的对应关系。本发明通过对彩色图像进行局部特征提取,将二维彩色图像数据进行抽象,利用特征提取算法计算出满足的条件的像素点,对于提取的特征点采用RANSAC算法来匹配特征点对的误匹配部分进行消除,进行优化计算来删除其中不匹配特征点,图像进行局部特征提取是对其内容进行分析和检测的前提,是将高维的图像数据进行抽象来化简表达的一种非常有效的方式,局部图像特征具有在图像中蕴含数量丰富,特征间相关度小。
技术研发人员:王小兵,焦健,贺雷,王艳华
受保护的技术使用者:中国电建集团西北勘测设计研究院有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!