清洁建议信息的生成方法及电子设备与流程
本发明涉及机器人,具体涉及一种清洁建议信息的生成方法及电子设备。
背景技术:
1、随着清洁机器人的技术发展,清洁机器人逐渐步入普通家庭,逐步将人们从繁重琐碎的家务劳动中解放,从而为人们提供极大的便利。通常清洁机器人遇到障碍物时,清洁机器人会避让障碍物和沿着障碍物边沿进行清洁。虽然人们能够设置清洁机器人定期清洁地面,但是清洁机器人并不能够挪开较重障碍物以对较重障碍物占据的区域进行清洁,当较重障碍物的当前未清洁次数增多,较多灰尘等垃圾容易集中到较重障碍物内。由于清洁机器人并未记录较重障碍物占据的区域的当前未清洁次数,导致较重障碍物占据的区域长期被人们忽略,如此不利于提升用户的体验感。
技术实现思路
1、本发明实施例的一个目的旨在提供一种清洁建议信息的生成方法及电子设备,旨在解决现有技术不能够提供清洁建议信息以便用户作出有效地清洁决策。
2、在第一方面,本发明实施例提供一种清洁建议信息的生成方法,包括:
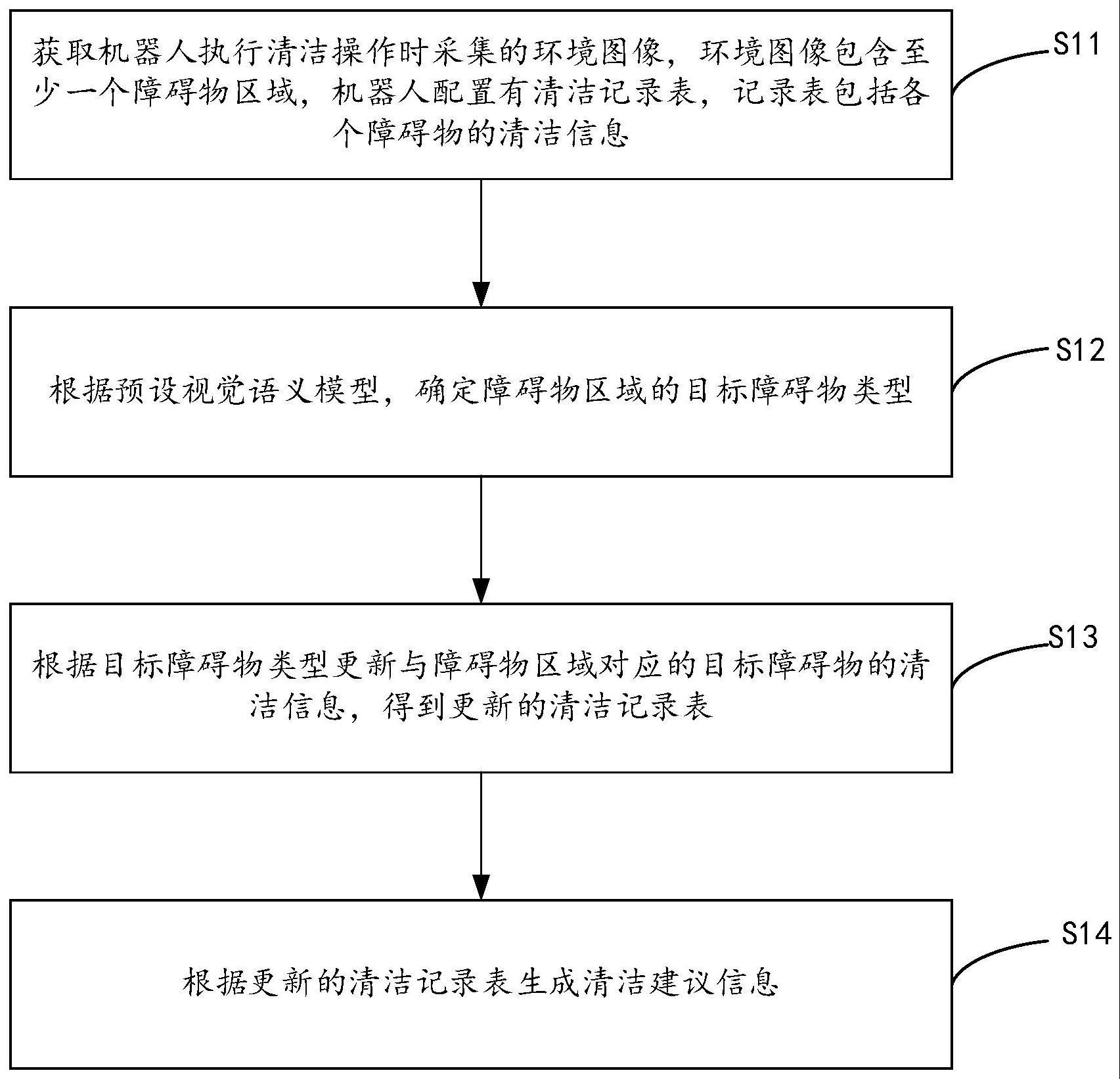
3、获取机器人执行清洁操作时采集的环境图像,所述环境图像包含至少一个障碍物区域,所述机器人配置有清洁记录表,所述清洁记录表包括各个障碍物的清洁信息;
4、根据预设视觉语义模型,确定所述障碍物区域的目标障碍物类型;
5、根据所述目标障碍物类型更新与所述障碍物区域对应的目标障碍物的清洁信息,得到更新的清洁记录表;
6、根据所述更新的清洁记录表生成清洁建议信息。
7、可选地,所述根据所述目标障碍物类型更新与所述障碍物区域对应的目标障碍物的清洁信息,得到更新的清洁记录表包括:
8、根据所述目标障碍物类型确定所述目标障碍物的目标移动类型;
9、根据所述目标障碍物类型及所述目标移动类型更新与所述障碍物区域对应的目标障碍物的清洁信息,得到更新的清洁记录表。
10、可选地,所述清洁信息包括当前未清洁次数,所述根据所述目标障碍物类型及所述目标移动类型更新与所述障碍物区域对应的目标障碍物的清洁信息包括:
11、根据所述目标障碍物类型遍历所述清洁记录表,得到所述目标障碍物的历史未清洁次数;
12、若所述目标移动类型为不可移动类型,则根据所述历史未清洁次数及预设次数阈值计算所述目标障碍物的当前未清洁次数;
13、若所述目标移动类型为可移动类型,则根据所述障碍物区域及预设比对信息确定所述目标障碍物的当前未清洁次数;
14、根据所述当前未清洁次数更新清洁记录表,得到更新的清洁记录表。
15、可选地,所述预设比对信息包括与所述目标障碍物对应的基准区域,所述根据所述障碍物区域及预设比对信息确定所述目标障碍物的当前未清洁次数包括:
16、根据所述障碍物区域提取最长线段;
17、根据所述基准区域确定基准线段,其中,所述基准线段为所述基准区域中长度最大的线段;
18、计算所述最长线段的中点到所述基准线段的中点的距离;
19、根据所述距离确定所述目标障碍物的当前未清洁次数。
20、可选地,所述根据所述距离确定所述目标障碍物的当前未清洁次数包括:
21、若所述距离大于预设距离阈值,则将预设次数阈值作为所述目标障碍物的当前未清洁次数;
22、若所述距离小于预设距离阈值,则根据所述历史未清洁次数及预设次数阈值计算所述目标障碍物的当前未清洁次数。
23、可选地,所述清洁记录表包括障碍物面积比,所述方法还包括:
24、确定所述目标障碍物所属的清洁分区为目标清洁分区及所述目标障碍物占据的区域面积;
25、根据所述区域面积与所述目标清洁分区的总面积计算所述目标障碍物的障碍物面积比。
26、可选地,所述清洁记录表包括每个清洁分区的未清洁面积比和障碍物面积比,所述方法还包括:
27、确定所述清洁分区中的待清洁区域;
28、根据所述待清洁区域的面积及所述清洁分区的总面积,计算待清洁面积比;
29、根据所述待清洁面积比及所述障碍物面积比计算所述清洁分区的未清洁面积比。
30、可选地,所述根据所述更新的清洁记录表生成清洁建议信息包括:
31、根据所述更新的清洁记录表筛选出在预设时间范围内的当前未清洁次数小于预设次数阈值的障碍物为候选障碍物;
32、若所述候选障碍物的移动类型为可移动类型,则生成所述候选障碍物的清洁建议信息。
33、在第二方面,本发明实施例提供一种非易失性可读存储介质,存储有计算机可执行指令,所述计算机可执行指令用于使电子设备执行上述的清洁建议信息的生成方法。
34、在第三方面,本发明实施例提供一种电子设备,包括:
35、至少一个处理器;以及,
36、与所述至少一个处理器通信连接的存储器;其中,
37、所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行上述的清洁建议信息的生成方法。
38、在本发明实施例提供的清洁建议信息的生成方法中,首先,本实施例获取机器人执行清洁操作时采集的环境图像,环境图像包含至少一个障碍物区域,机器人配置有清洁记录表,清洁记录表包括各个障碍物的未清洁信息。其次,本实施例根据预设视觉语义模型,确定障碍物区域的目标障碍物类型,此举能够方便后续针对性地调整与目标障碍物类型对应的目标障碍物的清洁信息。再次,本实施例根据目标障碍物类型更新与障碍物区域对应的目标障碍物的清洁信息,得到更新的清洁记录表,因此,本实施例能够实时地更新清洁记录表,以便后续能够根据清洁记录表可靠地生成清洁建议信息。最后,本实施例根据更新的清洁记录表生成清洁建议信息,因此,本实施例能够为用户提供清洁建议信息,以方便用户针对目标障碍物采取相应的清洁决策,如此有利于提高用户的体验感。
技术特征:
1.一种清洁建议信息的生成方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述根据所述目标障碍物类型更新与所述障碍物区域对应的目标障碍物的清洁信息,得到更新的清洁记录表包括:
3.根据权利要求2所述的方法,其特征在于,所述清洁信息包括当前未清洁次数,所述根据所述目标障碍物类型及所述目标移动类型更新与所述障碍物区域对应的目标障碍物的清洁信息包括:
4.根据权利要求3所述的方法,其特征在于,所述预设比对信息包括与所述目标障碍物对应的基准区域,所述根据所述障碍物区域及预设比对信息确定所述目标障碍物的当前未清洁次数包括:
5.根据权利要求4所述的方法,其特征在于,所述根据所述距离确定所述目标障碍物的当前未清洁次数包括:
6.根据权利要求1所述的方法,其特征在于,所述清洁记录表包括障碍物面积比,所述方法还包括:
7.根据权利要求1所述的方法,其特征在于,所述清洁记录表包括每个清洁分区的未清洁面积比和障碍物面积比,所述方法还包括:
8.根据权利要求1至7任一项所述的方法,其特征在于,所述根据所述更新的清洁记录表生成清洁建议信息包括:
9.一种非易失性可读存储介质,其特征在于,存储有计算机可执行指令,所述计算机可执行指令用于使电子设备执行如权利要求1至8任一项所述的清洁建议信息的生成方法。
10.一种电子设备,其特征在于,包括:
技术总结
本发明涉及机器人技术领域,公开一种清洁建议信息的生成方法及电子设备。清洁建议信息的生成方法包括:获取机器人执行清洁操作时采集的环境图像,环境图像包含至少一个障碍物区域,机器人配置有清洁记录表,清洁记录表包括各个障碍物的清洁信息,根据预设视觉语义模型,确定障碍物区域的目标障碍物类型,根据目标障碍物类型更新与障碍物区域对应的目标障碍物的清洁信息,得到更新的清洁记录表,根据更新的清洁记录表生成清洁建议信息。本实施例能够为用户提供清洁建议信息,以方便用户针对目标障碍物采取相应的清洁决策,如此有利于提高用户的体验感。
技术研发人员:谭国炎,叶力荣
受保护的技术使用者:深圳银星智能集团股份有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!