一种光伏电池板位置识别方法、系统及光伏机器人与流程
本发明涉及光伏,特别涉及一种光伏电池板位置识别方法、系统及光伏机器人。
背景技术:
1、目前在光伏机器人领域,光伏机器人的常见作业任务类型包括抓取光伏电池板、放置光伏电池板和清洗光伏电池板等等,均要求光伏机器人准确识别出光伏电池板位置。现有的位置识别方法主要通过直接识别光伏电池板的四条边缘金属框,确定光伏电池板的实际摆放位置,然后控制光伏机器人执行相应的作业方案。
2、但是实际工程情况下,多个光伏电池板的摆放位置通常比较接近,并且相邻的光伏电池板边缘均为颜色相同的边缘金属边框,在阳光照射下容易产生混淆,导致光伏电池板位置识别的精确性很差。
3、因此目前需要一种光伏电池板位置识别方法,可以基于光伏作业现场实际工况,精确地识别出各个光伏电池板的位置,便于后续根据光伏电池板位置信息执行相应作业。
技术实现思路
1、为解决目前光伏电池板位置识别的精确性较差的技术问题,本发明提供一种光伏电池板位置识别方法、系统及光伏机器人,具体的技术方案如下:
2、本发明提供一种光伏电池板位置识别方法,包括步骤:
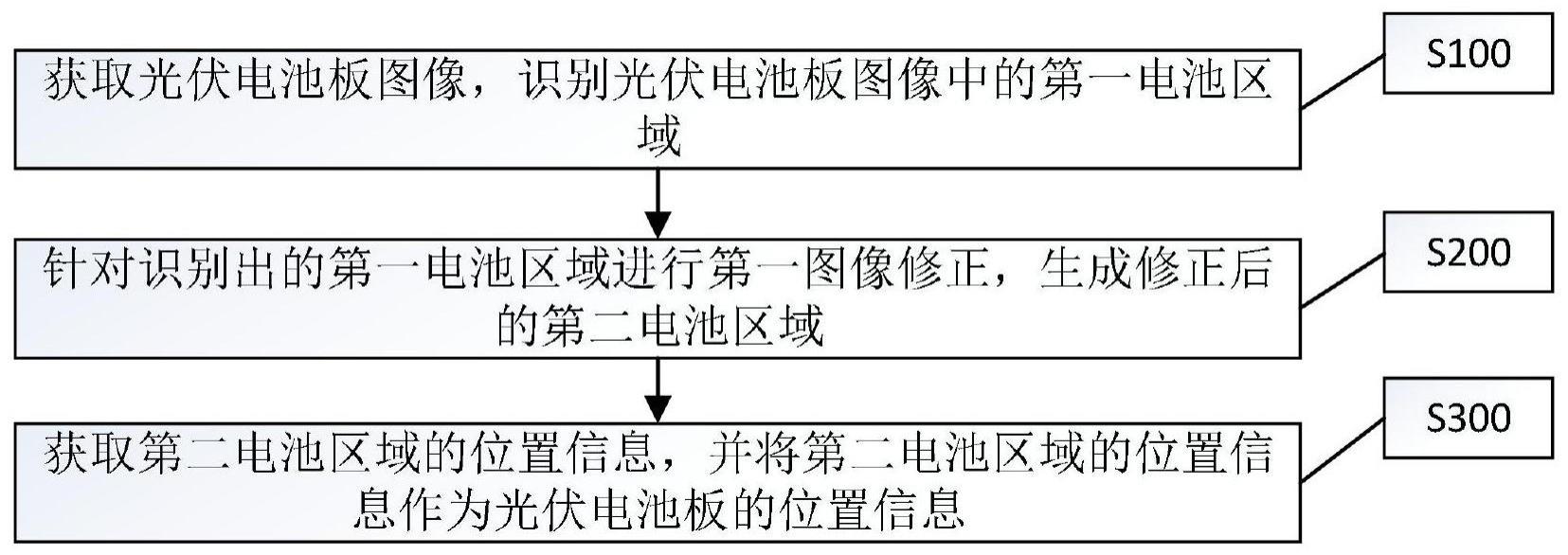
3、获取光伏电池板图像,识别所述光伏电池板图像中的第一电池区域;
4、针对识别出的所述第一电池区域进行第一图像修正,生成修正后的第二电池区域;
5、获取所述第二电池区域的位置信息,并将所述第二电池区域的位置信息作为光伏电池板的位置信息。
6、在一些实施方式中,所述的获取所述第二电池区域的位置信息之后,还包括步骤:
7、获取预设的标定误差;
8、根据所述标定误差对所述第二电池区域进行第二图像修正,生成修正后的第三电池区域;
9、获取所述第三电池区域的位置信息,并将所述第三电池区域的位置信息作为所述光伏电池板的位置信息。
10、在一些实施方式中,所述的获取预设的标定误差,具体包括:
11、预先获取若干所述光伏电池板对应的所述第二电池区域和目标位置区域;
12、计算各个所述光伏电池板对应的所述第二电池区域和所述目标位置区域之间的位置信息差值;
13、根据各个所述光伏电池板对应的各个所述位置信息差值的统计学参数,计算生成各个所述光伏电池板对应的所述标定误差。
14、在一些实施方式中,所述的识别所述光伏电池板图像中的第一电池区域,具体包括:
15、提取所述光伏电池板图像中特征参数,根据所述特征参数将所述光伏电池板图像分割为至少两个待识别图像区域;
16、所述待识别图像区域至少包括光电转换区域和边框支撑区域;
17、将所述光电转换区域作为所述第一电池区域。
18、在一些实施方式中,所述的提取所述光伏电池板图像中特征参数,根据所述特征参数将所述光伏电池板图像分割为至少两个待识别图像区域,具体包括:
19、提取所述光伏电池板图像中色调特征参数和饱和度特征参数;
20、基于所述色调特征参数和所述饱和度特征参数计算色度特征参数;
21、根据所述色度特征参数将所述光伏电池板图像分割为至少两个所述待识别图像区域,不同所述待识别图像区域对应不同所述色度特征参数阈值。
22、在一些实施方式中,本发明提供的光伏电池板位置识别方法,还包括:
23、控制光伏机器人根据所述光伏电池板的位置信息执行对应的作业任务,所述作业任务包括抓取光伏电池板任务、放置光伏电池板任务和清洗光伏电池板任务中至少一项。
24、在一些实施方式中,根据本发明的另一方面,本发明还提供一种光伏电池板位置识别算法训练方法,包括步骤:
25、获取标注有光伏电池板第一电池区域的若干光伏电池板图像;
26、基于预设深度学习算法和若干所述光伏电池板图像,训练光伏电池板第一电池区域识别模型;
27、在所述光伏电池板第一电池区域识别模型的输出层叠加第一图像修正算法,获得所述光伏电池板第一电池区域识别模型的第一输出数据;
28、对所述光伏电池板第一电池区域识别模型的所述第一输出数据进行数据修正,输出修正后的第二输出数据,并将所述第二输出数据作为所述光伏电池板的位置信息。
29、在一些实施方式中,根据本发明的另一方面,本发明还提供一种光伏电池板位置识别系统,包括:
30、获取识别模块,用于获取光伏电池板图像并识别所述光伏电池板图像中的第一电池区域;
31、第一修正模块,与所述获取识别模块连接,用于针对识别出的所述第一电池区域进行第一图像修正,生成修正后的第二电池区域;
32、位置信息生成模块,与所述第一修正模块连接,用于获取所述第二电池区域的位置信息,并将所述第二电池区域的位置信息作为光伏电池板的位置信息。
33、在一些实施方式中,根据本发明的另一方面,本发明还提供一种光伏机器人,包括处理器和存储器,所述存储器中存储有计算机程序,所述处理器与所述存储器连接,用于执行所述计算机程序实现上述光伏电池板位置识别方法所执行的操作。
34、在一些实施方式中,根据本发明的另一方面,本发明还提供一种存储介质,所述存储介质中存储有至少一条指令,所述指令由处理器加载并执行以实现上述光伏电池板位置识别方法的步骤,或者执行实现上述光伏电池板位置识别算法训练方法的步骤。
35、在一些实施方式中,根据本发明的另一方面,本发明还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行实现上述光伏电池板位置识别方法的步骤,或者执行实现所述光伏电池板位置识别算法训练方法的步骤。
36、本发明提供光伏电池板位置识别方法、系统及光伏机器人可以精确识别光伏电池板图像中的电池区域,并基于实际光伏电池板结构情况和场景需求对光伏电池板图像区域进行修正,得到更为精确的光伏电池板位置信息,提高从光伏电池板图像中识别光伏电池板位置的精确度。
技术特征:
1.一种光伏电池板位置识别方法,其特征在于,包括步骤:
2.根据权利要求1所述的一种光伏电池板位置识别方法,其特征在于,所述的获取所述第二电池区域的位置信息之后,还包括步骤:
3.根据权利要求2所述的一种光伏电池板位置识别方法,其特征在于,所述的获取预设的标定误差,具体包括:
4.根据权利要求1所述的一种光伏电池板位置识别方法,其特征在于,所述的识别所述光伏电池板图像中的第一电池区域,具体包括:
5.根据权利要求4所述的一种光伏电池板位置识别方法,其特征在于,所述的提取所述光伏电池板图像中特征参数,根据所述特征参数将所述光伏电池板图像分割为至少两个待识别图像区域,具体包括:
6.根据权利要求1~5中任一项所述的光伏电池板位置识别方法,其特征在于,还包括:
7.一种光伏电池板位置识别算法训练方法,其特征在于,包括步骤:
8.一种光伏电池板位置识别系统,其特征在于,包括:
9.一种光伏机器人,其特征在于,包括处理器和存储器,所述存储器中存储有计算机程序,所述处理器与所述存储器连接,用于执行所述计算机程序实现上述权利要求1~7中任一项所述光伏电池板位置识别方法所执行的操作。
10.一种存储介质,其特征在于,所述存储介质中存储有至少一条指令,所述指令由处理器加载并执行以实现权利要求1~6中任一项所述光伏电池板位置识别方法的步骤,或者执行实现权利要求7所述光伏电池板位置识别算法训练方法的步骤。
11.一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行实现权利要求1~6中任一项所述光伏电池板位置识别方法的步骤,或者执行实现权利要求7所述光伏电池板位置识别算法训练方法的步骤。
技术总结
本发明公开了一种光伏电池板位置识别方法、系统及光伏机器人,其方法包括步骤:获取光伏电池板图像,识别所述光伏电池板图像中的第一电池区域;针对识别出的所述第一电池区域进行第一图像修正,生成修正后的第二电池区域;获取所述第二电池区域的位置信息,并将所述第二电池区域的位置信息作为光伏电池板的位置信息。本发明可以光伏电池板位置识别的精确性。
技术研发人员:刘军,张邺
受保护的技术使用者:湖州丽天智能科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!