基于激光点云的地面检测方法、系统及计算机可读介质与流程
本发明主要涉及激光雷达点云检测,具体地涉及一种基于激光点云的地面检测方法、系统及计算机可读介质。
背景技术:
1、在车辆自动驾驶领域,车辆上通常会搭载激光雷达以感知周围环境,激光雷达具有探测分辨率高、抗干扰能力强、获取信息丰富以及可以全天时工作等特点。在车辆自动驾驶过程中需要对周围环境进行目标检测,例如当检测出行人、石头、土堆、栅栏等障碍物时,车辆需要进行相应的避让处置。在基于激光雷达的激光点云进行目标检测时,车辆上搭载的激光雷达的部分视场范围可能会覆盖地面,而地面点云会影响对障碍物尺寸的判断,地面点云对于目标检测任务来说是无效的传感器信息,因此需要根据地面检测方法筛选出地面点云点,再将地面点云点剔除,避免地面点云点对目标检测产生干扰。
2、现有的地面检测方法通常基于人工标注好的高精度地图来进行地面拟合,这些人工标注的高精度地图中包括道路边界等多种交通道路元素,地面检测方法会对已标出道路边界范围内的激光点云点进行地面拟合处理,从而筛选出地面点云点。现有的地面检测方法高度依赖于人工标注的高精度地图,而这些人工标注的高精度地图无法全面覆盖车辆行驶的所有场景,在车辆的部分行驶场景中存在地面点云点检测准确度不高的问题。
技术实现思路
1、本申请所要解决的技术问题是提供一种基于激光点云的地面检测方法、系统及计算机可读介质,可以提高地面点云点检测的准确度,适用于车辆行驶的大部分场景。
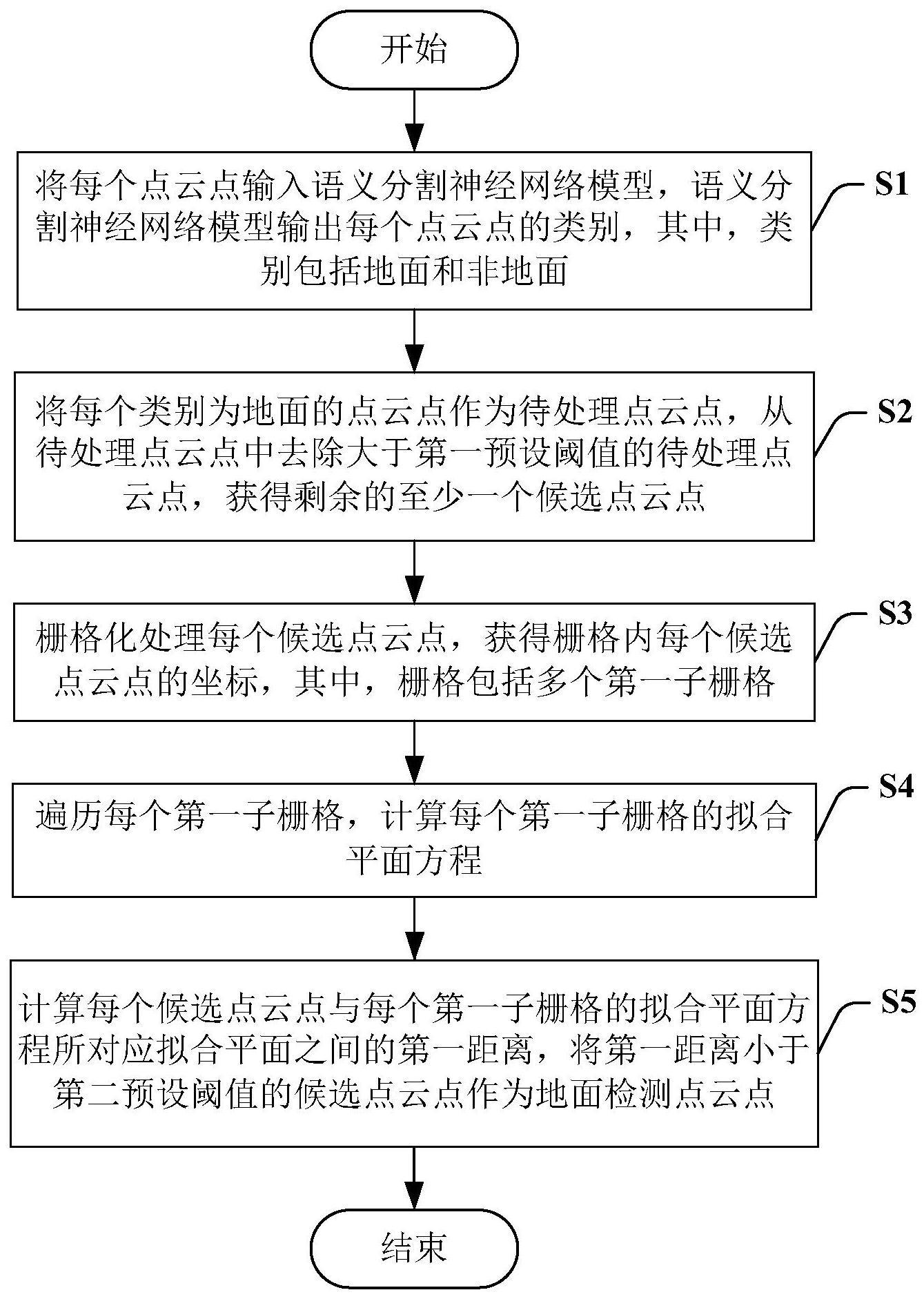
2、本申请为解决上述技术问题而采用的技术方案是一种基于激光点云的地面检测方法,激光点云包括至少一个点云点,该地面检测方法包括:步骤s1:将每个点云点输入语义分割神经网络模型,语义分割神经网络模型输出每个点云点的类别,其中,类别包括地面和非地面;步骤s2:将每个类别为地面的点云点作为待处理点云点,从待处理点云点中去除大于第一预设阈值的待处理点云点,获得剩余的至少一个候选点云点;步骤s3:栅格化处理每个候选点云点,获得栅格内每个候选点云点的坐标,其中,栅格包括多个第一子栅格;步骤s4:遍历每个第一子栅格,计算每个第一子栅格的拟合平面方程;以及步骤s5:计算每个候选点云点与每个第一子栅格的拟合平面方程所对应拟合平面之间的第一距离,将第一距离小于第二预设阈值的候选点云点作为地面检测点云点。
3、在本申请的一实施例中,在步骤s4中,计算每个第一子栅格的拟合平面方程的步骤包括:步骤s4a:在当前第一子栅格中随机选取不共线的多个候选点云点,根据多个候选点云点的坐标构建候选平面方程;步骤s4b:根据候选平面方程计算当前第一子栅格中的内点率;步骤s4c:根据当前第一子栅格中的内点率判断是否将候选平面方程作为当前第一子栅格的拟合平面方程。
4、在本申请的一实施例中,在步骤s4中,在遍历每个第一子栅格的过程中,重复步骤s4a~步骤s4c。
5、在本申请的一实施例中,第一子栅格中包括多个第二子栅格;步骤s4a进一步包括:在当前第一子栅格的任意个第二子栅格中随机选取不共线的三个候选点云点,根据三个候选点云点的坐标构建候选平面方程。
6、在本申请的一实施例中,第一子栅格包括低分辨率栅格,第二子栅格包括高分辨率栅格。
7、在本申请的一实施例中,在步骤s4b中,根据候选平面方程计算当前第一子栅格中的内点率的步骤包括:步骤s4ba:计算当前第一子栅格中每个候选点云点与候选平面方程所对应拟合平面之间的第二距离;步骤s4bb:判断第二距离是否小于第三预设阈值,若是,则将第二距离对应的候选点云点记为内点;若否,则将第二距离对应的候选点云点记为外点;步骤s4bc:计算当前第一子栅格中,内点的数量与候选点云点的数量的比值,得到当前第一子栅格中的内点率。
8、在本申请的一实施例中,在步骤s4c中,根据当前第一子栅格中的内点率判断是否将候选平面方程作为当前第一子栅格的拟合平面方程的步骤包括:判断当前第一子栅格中的内点率是否大于第四预设阈值;若是,则将候选平面方程作为当前第一子栅格的拟合平面方程;若否,则重复步骤s4a~步骤s4c并记录当前迭代次数,若当前迭代次数大于等于第五预设阈值,则结束遍历当前第一子栅格。
9、在本申请的一实施例中,在步骤s4之后,每个第一子栅格分别对应一个拟合平面方程;在步骤s5中,使用下面的公式计算每个候选点云点与每个第一子栅格的拟合平面方程所对应拟合平面之间的第一距离:
10、
11、其中,hi,表示第i行和第j列栅格中包括的候选点云点与当前拟合平面方程所对应拟合平面之间的第一距离,wm,表示第m行和第n列的栅格权重,k表示当前栅格的邻域,当前栅格的邻域包括当前栅格周围其他第一子栅格的数量,i、j、m、n、k均为整数。
12、在本申请的一实施例中,语义分割神经网络模型基于卷积神经网络构建,语义分割神经网络模型包括鸟瞰视图模块和范围视图模块;在步骤s1中,将每个点云点输入语义分割神经网络模型,语义分割神经网络模型输出每个点云点的类别的步骤包括:步骤s1a:将每个点云点分别输入鸟瞰视图模块和范围视图模块,得到鸟瞰视角特征向量和范围视角特征向量;步骤s1b:使用多层卷积层分别对鸟瞰视角特征向量和范围视角特征向量进行降维处理,得到鸟瞰视角高阶特征向量和范围视角高阶特征向量;步骤s1c:使用多层反卷积层分别对鸟瞰视角高阶特征向量和范围视角高阶特征向量进行升维处理,得到鸟瞰视角升维特征向量和范围视角升维特征向量;步骤s1d:加权融合鸟瞰视角升维特征向量和范围视角升维特征向量,得到融合特征向量,根据融合特征向量输出每个点云点的类别。
13、在本申请的一实施例中,类别中的非地面包括:车辆、行人、骑行者、绿植、路沿中的一类或多类。
14、本申请为解决上述技术问题还提出一种基于激光点云的地面检测系统,包括:存储器,用于存储可由处理器执行的指令;处理器,用于执行指令以实现如上的基于激光点云的地面检测方法。
15、本申请为解决上述技术问题还提出一种存储有计算机程序代码的计算机可读介质,计算机程序代码在由处理器执行时实现如上的基于激光点云的地面检测方法。
16、本申请的技术方案根据语义分割神经网络模型对点云点进行语义分割,获得地面类别的点云点和非地面类别的点云点,该语义分割神经网络模型可以自适应地识别点云点类别,可以提升激光点云分类的通用性;本申请在类别为地面的点云点中去除大于第一预设阈值的点云点后,将剩余的点云点作为候选点云点,栅格化处理候选点云点后,方便在栅格中进一步筛选需要的候选点云点;通过计算每个候选点云点与每个第一子栅格的拟合平面方程所对应拟合平面之间的第一距离,将第一距离小于第二预设阈值的候选点云点作为地面检测点云点,可以有效地筛选出实际的地面点云点,可以提高地面点云点检测的准确度,后续可以将筛选出的地面检测点云点剔除,从而避免地面点云点对目标检测任务产生干扰。本申请不依赖于人工标注的高精度地图,适用于车辆行驶的大部分场景。
技术特征:
1.一种基于激光点云的地面检测方法,所述激光点云包括至少一个点云点,其特征在于,包括:
2.如权利要求1所述的地面检测方法,其特征在于,在所述步骤s4中,计算所述每个第一子栅格的拟合平面方程的步骤包括:
3.如权利要求2所述的地面检测方法,其特征在于,在所述步骤s4中,在遍历每个第一子栅格的过程中,重复所述步骤s4a~所述步骤s4c。
4.如权利要求2所述的地面检测方法,其特征在于,所述第一子栅格中包括多个第二子栅格;所述步骤s4a进一步包括:在当前第一子栅格的任意个第二子栅格中随机选取不共线的三个候选点云点,根据所述三个候选点云点的坐标构建候选平面方程。
5.如权利要求4所述的地面检测方法,其特征在于,所述第一子栅格包括低分辨率栅格,所述第二子栅格包括高分辨率栅格。
6.如权利要求2所述的地面检测方法,其特征在于,在所述步骤s4b中,根据所述候选平面方程计算所述当前第一子栅格中的内点率的步骤包括:
7.如权利要求2或6所述的地面检测方法,其特征在于,在所述步骤s4c中,根据所述当前第一子栅格中的内点率判断是否将所述候选平面方程作为所述当前第一子栅格的拟合平面方程的步骤包括:
8.如权利要求1所述的地面检测方法,其特征在于,在所述步骤s4之后,每个第一子栅格分别对应一个拟合平面方程;在所述步骤s5中,使用下面的公式计算所述每个候选点云点与所述每个第一子栅格的拟合平面方程所对应拟合平面之间的第一距离:
9.如权利要求1所述的地面检测方法,其特征在于,所述语义分割神经网络模型基于卷积神经网络构建,所述语义分割神经网络模型包括鸟瞰视图模块和范围视图模块;在所述步骤s1中,将每个点云点输入语义分割神经网络模型,所述语义分割神经网络模型输出所述每个点云点的类别的步骤包括:
10.如权利要求1所述的地面检测方法,其特征在于,所述类别中的非地面包括:车辆、行人、骑行者、绿植、路沿中的一类或多类。
11.一种基于激光点云的地面检测系统,其特征在于,包括:
12.一种存储有计算机程序代码的计算机可读介质,其特征在于,所述计算机程序代码在由处理器执行时实现如权利要求1-10任一项所述的地面检测方法。
技术总结
本发明涉及一种基于激光点云的地面检测方法、系统及计算机可读介质,包括:步骤S1:将点云点输入语义分割神经网络模型,语义分割神经网络模型输出点云点的类别,其中类别包括地面和非地面;步骤S2:将类别为地面的点云点作为待处理点云点,并去除大于第一预设阈值的待处理点云点,获得剩余的候选点云点;步骤S3:栅格化处理候选点云点,获得栅格内候选点云点的坐标,其中栅格包括多个第一子栅格;步骤S4:遍历第一子栅格,计算第一子栅格的拟合平面方程;步骤S5:计算候选点云点与第一子栅格的拟合平面方程所对应拟合平面之间的第一距离,将第一距离小于第二预设阈值的候选点云点作为地面检测点云点。本发明可以提高地面点云点检测的准确度。
技术研发人员:张灿,宋文辉,潘奇,陈睿,赵天坤
受保护的技术使用者:合众新能源汽车股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!