一种针对大型固定翼无人机自主着陆的跑道识别分割方法与流程
本发明涉及图像分割,特别是一种针对大型固定翼无人机自主着陆的跑道识别分割方法。
背景技术:
1、大型固定翼无人机的起飞和着陆可以自主完成,但通常依赖gnss和地面差分站提供的精确定位信息。在没有地面差分站或gnss拒止环境下,无人机可以通过前视机载相机的观测数据,识别分割跑道,并根据跑道分割结果估计飞机与跑道的相对位置,进而完成自主降落。跑道识别任务存在识别目标距离远、环境干扰大等问题,如浓雾、昼夜变化等。跑道识别分割的精度对无人机的安全着陆至关重要。有的跑道识别方法基于霍夫变换检测跑道边线,可以比较准确的分割出跑道,但对图像质量要求较高,只能用于距离机场跑道较近的地方。还有的方法基于深度学习网络,经过充分训练的网络可以在较远出识别出跑道,但识别分割出的跑道轮廓很不精确。
技术实现思路
1、鉴于此,本发明提供一种针对大型固定翼无人机自主着陆的跑道识别分割方法,以解决上述技术问题。
2、本发明公开了一种针对大型固定翼无人机自主着陆的跑道识别分割方法,其包括:
3、将第一待分割图像输入深度学习网络中,得到一张与该第一待分割图像尺寸相同的单通道图像,基于预设阈值,从该单通道图像中提取面积最大的区域作为跑道在图像中的大致轮廓,继而得到第二待分割图像;
4、基于大致轮廓的质心和半径,并结合svm的边界阈值确定更贴合真实跑道的像素轮廓。
5、进一步地,在所述单通道图像中,每个像素值在0到1之间,像素值表示对应像素是跑道的概率。
6、进一步地,所述基于预设阈值,从该单通道图像中提取面积最大的区域作为跑道在图像中的大致轮廓,包括:
7、将所述单通道图像中所有概率高于预设阈值的像素赋值255,其余像素赋值0,即得到一张二值图,像素值为255,表示该像素在跑道上,像素值为0,表示该像素不在跑道上;
8、从像素值为255的像素组成的多个连通区域中选择面积最大的连通区域,作为跑道在图像中的大致轮廓;将其他的连通区域的像素均赋值为0,即得到第二待分割图像。
9、进一步地,所述基于大致轮廓的质心和半径,并结合svm的边界阈值确定更贴合真实跑道的像素轮廓,包括:
10、计算大致轮廓的质心和半径;其中,半径记为;
11、在第二待分割图像上,基于大致轮廓的质心和半径,获取正样本和负样本;
12、分别得到正负样本后,用svm算法对正负样本进行分类,得到正负样本分界点的像素值,为像素三通道阈值,利用得到的像素三通道阈值,对跑道轮廓附近区域的图像进行高通或低通滤波,得到更贴合真实跑道的像素轮廓。
13、进一步地,所述在第二待分割图像上,基于大致轮廓的质心和半径,获取正样本和负样本,包括:
14、在第二待分割图像上,找出以质心为圆心,为半径的圆形上的像素,而与这些像素位置相对应的所述第一待分割图像上的rgb像素值就是正样本,函数为向上取整函数;
15、在第二待分割图像上,提取以质心为圆心,以为半径的圆形经过的多个像素位置,与多个像素位置对应的所述第一待分割图像的rgb像素值为负样本,floor()为向下取整函数。
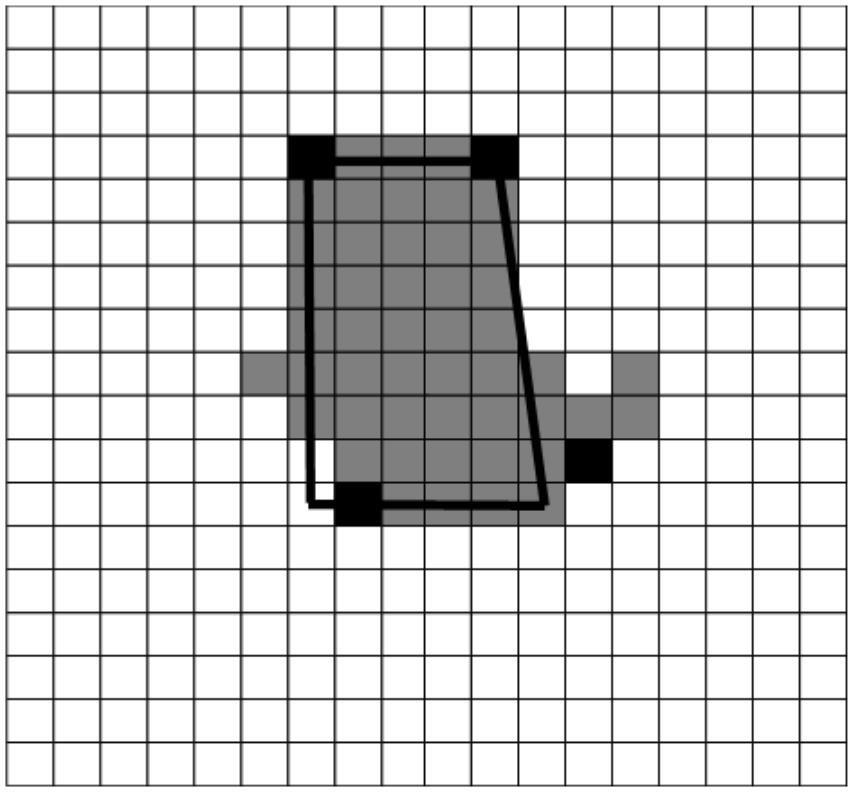
16、进一步地,还包括:若经过网络分割和svm填充后,得到的第二待分割图像中的跑道的轮廓出现缺失或误识别,则需找出跑道的四条顶点,然后基于这四个顶点,通过以最大化得分函数为优化目标,划定和以及和的搜索区间,使用黄金分割法搜索,以得到对应的最优边线;其中,表示横边线上列坐标为二分之一图像列数时的像素行数;表示纵边线上行坐标为图像二分之一行数时的像素列数;表示横边线的斜率,表示纵边线的斜率。
17、进一步地,所述找出跑道的四条顶点,然后基于这四个顶点,通过以最大化得分函数为优化目标,划定和以及和的搜索区间,使用黄金分割法搜索,以得到对应的最优边线,包括:
18、确定跑道的大致轮廓的左上、右上、左下、右下四个点,并将其作为跑道的四个顶点的初值;
19、利用四个顶点的初值初始化跑道边线,即四个顶点依次连接,构成四边形,每一条边为边线;
20、以最大化得分函数为优化目标,以和以及和对应的所有直线为限,分别遍历跑道的上下左右四条线上的所有像素,在跑道的边线的初值附近,得到得分最高的线,即最优边线。
21、进一步地,在所述得到对应的最优边线之前,还包括:
22、需要建立uv坐标系,即以第二待分割图像的左上顶点为原点,以第二待分割图像的每一行所在的方向为u轴,以第二待分割图像的每一列所在的方向为v轴。
23、进一步地,所述确定跑道的大致轮廓的左上、右上、左下、右下四个点的方法为:
24、遍历大致轮廓内的所有像素,行数加列数最大的,即u+v坐标值最大的像素为右下角,u+v坐标值最小的像素为左上角,u-v坐标值最大的像素为右上角,v-u坐标值最大的像素为左上角。
25、进一步地,所述以最大化得分函数为优化目标,以和以及和对应的所有直线为限,分别遍历跑道的上下左右四条线上的所有像素,在跑道的边线的初值附近,得到得分最高的线,包括:
26、对于左边线,以和对应的所有直线为限,若左边线穿过的像素是跑道区域,则当该穿过的像素的左侧像素不是跑道区域时加一分,其余情况不加分;若左边线穿过的像素不是跑道区域,则当该穿过的像素的右侧像素是跑道区域时加一分,其余情况不加分;将计分结果中的最大值对应的边线确定为最优边线;
27、对于右边线,以和对应的所有直线为限,若右边线穿过的像素是跑道区域,则当该穿过的像素的右侧像素不是跑道区域时加一分,余情况不加分,若右边线穿过的像素不是跑道区域,则当该穿过的像素的左侧像素是跑道区域时加一分,其余情况不加分;将计分结果中的最大值对应的边线确定为最优边线;
28、对于上边线,以和对应的所有直线为限,若上边线穿过的像素是跑道区域,则当该穿过的像素的上方像素不是跑道区域时加一分,余情况不加分,若上边线穿过的像素不是跑道区域,则当该穿过的像素的下方像素是跑道区域时加一分,其余情况不加分;将计分结果中的最大值对应的边线确定为最优边线;
29、对于下边线,以和对应的所有直线为限,若直线穿过的像素是跑道区域,则当该穿过的像素的下方像素不是跑道区域时加一分,余情况不加分,若下边线穿过的像素不是跑道区域,则当该穿过的像素的上方像素是跑道区域时加一分,其余情况不加分;将计分结果中的最大值对应的边线确定为最优边线;
30、所有最优边线,即四条最优边线组成的四边形即为真实跑道的轮廓。
31、由于采用了上述技术方案,本发明具有如下的优点:在无人机距离跑道较远、有雾干扰的情况下,本方法仍然能够快速且准确地识别出跑道并分割出跑道轮廓。
技术特征:
1.一种针对大型固定翼无人机自主着陆的跑道识别分割方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,在所述单通道图像中,每个像素值在0到1之间,像素值表示对应像素是跑道的概率。
3.根据权利要求1所述的方法,其特征在于,所述基于预设阈值,从该单通道图像中提取面积最大的区域作为跑道在图像中的大致轮廓,包括:
4.根据权利要求1所述的方法,其特征在于,所述基于大致轮廓的质心和半径,并结合svm的边界阈值确定更贴合真实跑道的像素轮廓,包括:
5.根据权利要求4所述的方法,其特征在于,所述在第二待分割图像上,基于大致轮廓的质心和半径,获取正样本和负样本,包括:
6.根据权利要求1所述的方法,其特征在于,还包括:若经过网络分割和svm填充后,得到的第二待分割图像中的跑道的轮廓出现缺失或误识别,则需找出跑道的四条顶点,然后基于这四个顶点,通过以最大化得分函数为优化目标,划定和以及和的搜索区间,使用黄金分割法搜索,以得到对应的最优边线;其中,表示横边线上列坐标为二分之一图像列数时的像素行数;表示纵边线上行坐标为图像二分之一行数时的像素列数;表示横边线的斜率,表示纵边线的斜率。
7.根据权利要求6所述的方法,其特征在于,所述找出跑道的四条顶点,然后基于这四个顶点,通过以最大化得分函数为优化目标,划定和以及和的搜索区间,使用黄金分割法搜索,以得到对应的最优边线,包括:
8.根据权利要求6所述的方法,其特征在于,在所述得到对应的最优边线之前,还包括:
9.根据权利要求7所述的方法,其特征在于,所述确定跑道的大致轮廓的左上、右上、左下、右下四个点的方法为:
10.根据权利要求7所述的方法,其特征在于,所述以最大化得分函数为优化目标,以和以及和对应的所有直线为限,分别遍历跑道的上下左右四条线上的所有像素,在跑道的边线的初值附近,得到得分最高的线,包括:
技术总结
本发明公开了一种针对大型固定翼无人机自主着陆的跑道识别分割方法,该方法包括:将第一待分割图像输入深度学习网络中,得到一张与该第一待分割图像尺寸相同的单通道图像,基于预设阈值,从该单通道图像中提取面积最大的区域作为跑道在图像中的大致轮廓,继而得到第二待分割图像;基于大致轮廓的质心和半径,并结合SVM的边界阈值确定更贴合真实跑道的像素轮廓。本发明在无人机距离跑道较远、有雾干扰的情况下,仍能快速且准确地识别出跑道并分割出跑道轮廓。
技术研发人员:梁文斌,王钦,梅涛,赵凯,颜郁洁
受保护的技术使用者:四川腾盾科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!